姿态传感器的原理与应用文献笔记
@[TOC]( 姿态传感器的原理与应用文献笔记)
20210526
一、高精度姿态传感器x
1.姿态传感器的定义和意义
姿态传感器以嵌入式系统为核心,基于“固态”结构,采用先进的倾角测量技术分 X、Y
两路测量平面倾斜角,对多维重力加速度信息进行数据处理与姿态角度解算,具有环境适应
能力强、测量范围大、精度高、响应时间短等特点。可广泛应用于各种车辆、船舶、火炮及武
器平台的姿态测量与倾斜角补偿控制,具有良好的社会与经济效益,推广应用前景巨大。
二、基于 9 轴姿态传感器的 CNN 旗语动作识别方法x
本文基于 CNN 框架完成了对 5 种典型的旗语动作的识别准确率的研究分析,通过 wrcoef,appcoef,detcoef 这 3 类小波分解重构对数据进行去噪,关键信息提取及获取相应重构信号,提出了一种基于 CrossEntropy-Logistic 联合损失函数的分类模型,经过实验发现,基于 CL 联合损失函数的detcoef 小波分解重构在测试集上的实验获得了较高的测试准确率
三、基于MPU-6050及蓝牙技术的姿态检测系统设计
通俗易懂!!!
MPU6050、蓝牙模块和上位机的软硬件设计;
卡尔曼滤波、四元数的定义和应用;
载体静态和动态检测偏航角时,需要注意的地方;
四、基于 PID 算法和卡尔曼滤波的平衡车控制系统
通俗易懂!!!
STM32、MPU6050、蓝牙、电机驱动;
PID控制算法、平衡车/单摆原理、卡尔曼滤波;
本文提出基于 PID 算法和卡尔曼滤波数据融合的平衡车控制系
统设计与实现,本系统以 PID 算法为核心,由卡尔曼滤波对加速度
计和陀螺仪传感器数据融合实现系统的最优估算。根据实测,系统
具有调节速度快、精度较高、抗干扰能力强等优点,具有一定的实
际应用参考价值。
五、基于STM32的低成本位姿测量系统设计(可以根据该论文写自己的PCB电路对应的论文)
模块化清晰!!!可用于改写自己的文献,可以把学校的LOGO打在PCB上
也可以根据这篇文章的第三章和第四章的思路来做PPT!!!
SWD电路的改进!!!

1.高精度位子测量技术和MEMS技术的特点区别;
2.位姿测量研究现状、MEMS陀螺仪的研究发展现状、时钟同步研究现状;
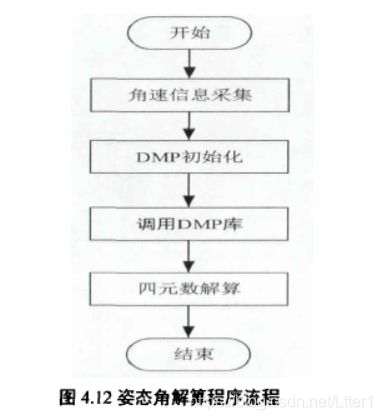
3.MPU9250、四元数算法解算姿态原理和特点,以及为什么使用该算法(四元数);
4.姿态传感器模块选型、硬件电路设计
硬件电路是根据MPU9250的操作手册设计的!!!
5.串行接口电路:TTL异步串口通信方式;
6.SWD接口电路(和JTAG不一样)只用4线,和I2C的引脚类似,而JTAG使用10线;
在电路设计上,该论文考虑了上拉和下拉电阻;
在测试上可以使用ST-LINK方式对系统的软件进行调试和下载!

7.电源模块电路的设计根据!!
8.姿态检测软件设计!!!
载体姿态解析的解释,具体的结算方法;
选择计算量较小的四元数算法的原因:降低处理器的CPU利用率;
9.硬件结算(DMP库自带的四元数算法)的原理:
 可以对DSP28系列—驱动六轴MPU6050输出欧拉角进行修改!!!
可以对DSP28系列—驱动六轴MPU6050输出欧拉角进行修改!!!
 10.陀螺仪标定实验(动态标定)及其流程和误差模型
10.陀螺仪标定实验(动态标定)及其流程和误差模型
利用四元数+MPU9250可以实现较为精确地得到相应的欧拉角!!!


11.姿态检测实验
姿态静态检测实验和动态监测实验的方法和步骤!!!
12.存在的不足

20210527
六、基于多姿态传感器数据融合的机器人交互示教器研究
1.多姿态传感器(MPU6050+HMC5883L)在交互示教器上的应用;
2.交互示教器的特点;
3.交互示教器的硬件组成(STM32F1+MPU6050+HMC5883L)及其功能;
4.姿态描述:欧拉角法+四元数法
5.姿态矫正算法:互补滤波算法
陀螺仪、加速度计和磁力计的功能
6.基于四元数法的姿态更新算法:
四元数微分方程;
一阶龙格库塔法更新四元数,提高姿态解算的实时性和精度;
7.姿态算法实验的设置
七、基于光流传感器的四旋翼飞行器设计
1.飞行器自主导航系统分为室外和室内两种系统:
系统不同,采用的硬件及其算法不同。特别是光流传感器易受环境影响
2.MPU9250+串级PID
3.硬件组成结构=硬件平台组成+主控芯片(TM4C123GH6PM)+传感器(姿态传感器+超声波传感器+光流传感器)+无线通讯模块;
4.软件算法设计=主控算法(双环控制算法)+姿态解算算法(四元数表示法+一阶毕卡算法)+定点控制算法设计+姿态控制算法
八、基于卡尔曼互补滤波的水下机器人的姿态解算研究
利用 MPU6050 传感器构造了水下机器人姿态测量与解算系统并提出了一种卡尔曼互补滤波算法。该算法首先利用陀螺仪测量的角速度值积分得到姿态角 θg,同时利用加速度计测量的数值计算姿态角 θa ; 然后利用卡尔曼滤波将 θg 与 θa 融合得到姿态角 θKalman,最后根据互补滤波算法将姿态角 θa、θg、θKalman按照一定的比例融合得到最终的融合估计姿态角 θ。通过实验对该算法进行验证,该算法得到姿态角的波动范围小且比较稳定; 能够可靠、有效地抑制陀螺仪的漂移。
1.惯性传感器的组成和应用价值;
2.姿态角解算算法有哪些?;
3.卡尔曼滤波姿态结算的阐述;
4.卡尔曼互补滤波算法设计:
由于海底磁场干扰严重,因此只使用MPU6050作为姿态传感器,为了提高其姿态角测量的稳定性和准确性,提出了基于陀螺仪和加速度计的硬件、卡尔曼滤波软件结算、以及基于硬件和软件结算姿态角的互补算法。
5.基于姿态传感器MPU6050和主控芯片STM32F103测得的数据,在Labview中编制上位机,并在静动态环境中,采集横滚角的姿态角数据,比较验证卡尔曼滤波算法和卡尔曼互补滤波算法的差异,并验证了卡尔曼互补滤波算法的优越性(精度提高50%)。
十、基于卡尔曼滤波的 VICTS 天线姿态解算研究
一种基于 MEMS 惯性器件和卡尔曼滤波算法的姿态解算系统。采用 MPU9250 姿态传感器和 DSPF28335 检测载体姿态的变化,利用四元数实 时更新捷联姿态矩阵,通过卡尔曼滤波算法对传感器的姿态数据进行融合处理,消除噪声引起的测量值和真实值 的误差,最后得到 VICTS 天线载体的姿态角。
1.MPU9250的优势和不足;
2.互补滤波的缺陷+卡尔曼滤波的优势;
3.研究姿态解算的目标;
4.欧拉角的描述;
5.四元数更新姿态矩阵;
一阶库塔法+DSP28335
6.卡尔曼滤波算法;
基本思想、优点、目的、实质;
7.紧耦合姿态解算及其算法设计逻辑;
8.四元数解算姿态和卡尔曼滤波算法的优缺点,以及卡尔曼滤波算法的优势;
十一、基于扩展卡尔曼滤波的无人飞行器姿态解算
1.姿态数据对无人机稳定飞行非常重要;
2.卡尔曼滤波算法的缺陷:无法彻底解决非线性的姿态解算问题
卡尔曼滤波基本结算流程

3.扩展卡尔曼滤波器的局限性:较少考虑实际飞行使用;
4.本文的创新点:将“扩展卡尔曼滤波器”应用于无人机实际飞行当中!
5.局限性:仅对俯仰角和横滚角的数据进行了分析,没有体现偏航角的数据
十二、基于姿态传感器和 ARM 板的电梯智能语音系统(可用于阐述气压计的作用)x
1.采用的姿态传感器:

2.气压传感器测量大气压强的问题
3.本文只是用到了JY901B姿态传感器的气压值,用于测量高度
4.本文设计的基于 JY901B 姿态传感器和 Raspberry Pi
的电梯智能语音提示系统通过模块化组合和有效的软件算
法处理,实现了电梯精准报站和多种智能语音提示功能,具
有体积小、低功耗、高精度、独立安装等特点,适用于各种电
梯应用场合,填补了业界对独立式电梯楼层检测装置的空
缺,满足现代社会发展需求,具有广泛的应用前景。
十三、九轴无线姿态传感器(LPMS-B)检测分析及应用(可用于综述背景/前言的阐述)
信息时代的关键在于信息获取,信息获取关键在于传感器。姿态信息获取、姿态检测具有广泛和重要 的应用范围,在无人机的惯性测量系统、车辆船舶倾 斜角的测量、机器人运动的测量等都有着重要的应 用。目前,在姿态测量组合方面,比较成熟的有加速度 计、陀螺仪和磁强计组合,现有的惯性姿态测量系统主要采用这种组合方式。随着新材料,新原理,新技术的不断出现,姿态测量组合逐渐向小型化、低成本、高 精度的方向发展。国外对于 MEMS(MEMS,MicroElectro-Mechanical System)的研究较早,20 世纪 80
年代在加拿大、韩国、日本以及澳大利亚等国家都开 展了深入的研究,此外,一些高校和企业投入大量的 精力物力开展 MEMS 研究[1,2,3],都取得了不错的研究成果。许多高技术公司,例如:美国J.F.Lehman &Company 公司[3]的最新产品 SiNAV 型组合导航系统采用 MIMU/GPS 紧耦合方案,定位误差小于 10 m,速 度误差小于 0.1 m/s,可耐受 20 000 g 的冲击,陀螺测 量范围可达±14 000(°)/s. 德国 Litef 公司[2]B-290 硅加速度计,量程为 10 g,标度因数稳定性为 3 × 10-4, 偏置稳定性为 250 × 10-6 g,已经与光纤陀螺组合成IMU.国内对于姿态传感器检测技术的发展起步较晚, 和发达国家相比存在较大差距,但一些高校和相关研 究部门也取得了很大进步。特别是清华大学、北京航空航天大学、哈尔滨工业大学和哈尔滨工程大学以及中国时代电子集团[3]等都对姿态传感器检测相关技术 进行了大量研究,而且取得显著研究成果。
十四、两轮自平衡车姿态传感器信息融合研究(从硬件角度阐述了姿态传感器的不足,并使用卡尔曼滤波和互补滤波算法分别实验,验证了卡尔曼滤波更加准确)
可以在引例中阐述姿态传感器和相关姿态融合算法在两轮平衡车中的应用
1.两轮平衡车的性能描述,以及和姿态信息的关系描述;
2.惯性MEMS传感器的固有特性决定了姿态传感器的固有特性!!!
3.卡尔曼滤波的介绍;
4.互补滤波的介绍:
组成以及使用一阶互补滤波的效果
5.一阶互补滤波和卡尔曼滤波姿态解算的对比:
文中给出了参数调试方法并给出了效果较好的参数值,发现卡尔曼滤波的效果要优于互补滤波。
十五、双轴姿态传感器测试平台设计
姿态传感器作为一种高精度的测量仪器,是检测载体姿态变化的重要工具,其在工业控制、军事装备、航空航天等领域应用十分广泛[1]
十六、四旋翼飞行器传感器故障诊断的研究(在写传感器结构和原理的时候可以用到)
2.1.2飞行控制传感器的功能;
具体包括各种传感器的介绍
3.1姿态传感器;
MPU6050;
包括陀螺仪和加速度计的结构与原理


3.2传感器误差分析和故障建模:
具体包括陀螺仪和加速度计的误差模型和常见的故障类型;
3.3飞行控制传感器的故障模式:
看不懂!!!
十七、微型攻击型无人机设计(可以用于磁力计等应用部分的校准,对高度测量传感器的描述很多,但是姿态传感器和气压计不一样,一个和姿态有关,另一个和高度有关;姿态控制器可以参考这篇文章学习)
无人机的分类;目前的导航技术,以及惯性导航的核心;
2.2飞控硬件设计
和之前的硬件不一样!!!
不用写这个,咱们主要是研究的扑翼飞行器!!!
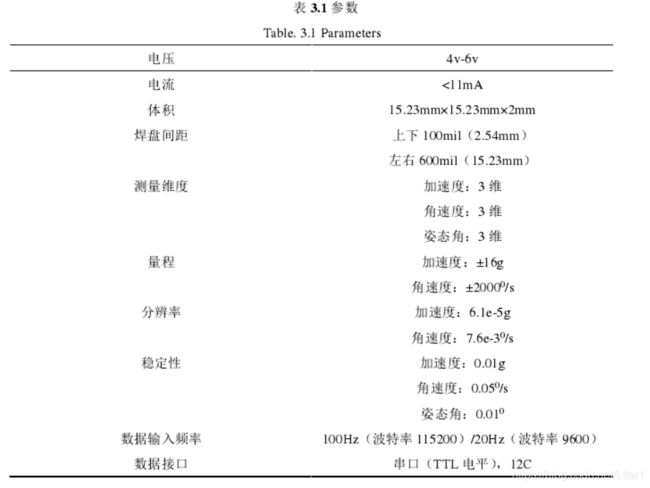
 其中姿态传感器 ICM20602 相比于MPU6050,在量程相同的情况下,它具有更低的噪声,更高的信噪比。
其中姿态传感器 ICM20602 相比于MPU6050,在量程相同的情况下,它具有更低的噪声,更高的信噪比。
可以得出 AK8963 的测量精度和范围都要优于另外两种
飞行器高度的测量可以使用激光测距模块或者气压计。本文也阐述了两者的区别;
3.1.1加速度计数据校准
3.1.2陀螺仪数据校准
3.1.3磁力计数据校准
3.3无损卡尔曼滤波
3.3.1卡尔曼滤波原理
3.3.2UT变换原理
对于非线性系统,常用的滤波器包含哪些?
UKF(无损卡尔曼滤波)=UT+卡尔曼滤波
UT变换的思想
3.4姿态解算
介绍了几种姿态解算的方法,并分析了对应的优缺点;
3.4.1四元素的姿态解算
3.4.2基于UKF的姿态融合
3.5高度解算
5.1.2基于串级PID的控制器设计

5.3飞控软件系统设计
6.1.1姿态融合
使用互补滤波、扩展卡尔曼滤波、无损卡尔曼滤波进行姿态角融合;
实验数据比较后得到无损卡尔曼滤波的效果更好