论文阅读:Distortion-Free Wide-Angle Portraits on Camera Phones
论文阅读:Distortion-Free Wide-Angle Portraits on Camera Phones
今天介绍一篇谷歌 2019 年的论文,是关于广角畸变校正的。
Abstract
广角摄影,可以带来不一样的摄影体验,因为广角的 FOV 更大,所以能将更多的内容拍摄进画面,在多人集体合影的时候,一般用广角可以将大家都拍到,但是广角摄影也有弊端,最显著的问题就是畸变,随着 FOV 的增加,画面边缘的人很容易发生变形,比如人头,身体被拉伸。这种畸变让画面边缘的人与真实的人差异很大。这篇论文就是为了解决广角摄影下的畸变问题的。给定一张广角下的人像照,文章中的算法是通过构建一个能量优化函数,将球极投影下的人脸区域与透视投影下的背景区域的位移 mesh 进行联合优化,从而达到一个畸变校正的目的。这篇文章里的算法最后应该是用到了谷歌的 Pixel 手机中了。
Introduction
文章中首先提到了畸变的几种成因, camera 成像是遵循透视投影规律的,透视成像投影的规律就是近大远小,同时视场边缘的成像随着入射角的增加,会产生更大的透视形变,这种形变是由透视投影的客观规律产生的,无法避免。此外镜头本身也会有光学畸变,这是属于光学像差的一种,FOV 越大的镜头,这种光学畸变也会越明显,光学畸变会导致直线弯曲,不过相比透视畸变,镜头的光学畸变有比较成熟的校正方法,比如经典的张正友校正法,通过标定棋盘格,可以估计出镜头的畸变参数,从而进行镜头的光学畸变校正。
不过,即使进行了镜头的光学畸变校正,成像的透视畸变依然存在,所以这篇文章主要是为了解决镜头的透视畸变问题,作者在文章中也提到,他们提出的方法也属于与内容相关的 warping 方法,这类方法之前也广泛地应用于各种图像的操作中,比如全景的拼接,广角的畸变校正,防抖等。本文主要聚焦于人脸区域的 warp,作者认为对于人像摄影来说,用户对人脸的形状是最敏感的。
Method
文章的方法,看起来流程比较简单,如下所示:
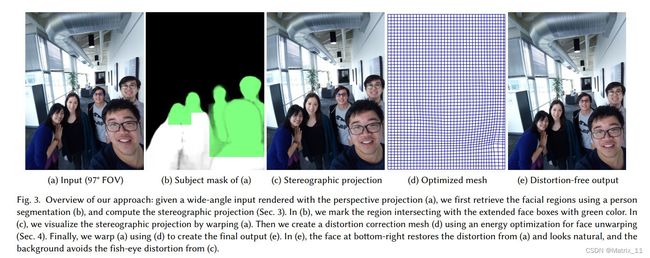
给定一张输入图片,首先是用一个分割模型,将人脸区域分割出来;然后将人脸区域进行球极投影;接着利用一个能量函数,将球极投影后的人脸区域 mesh 与背景区域的 mesh 进行优化,使得人脸区域与背景区域的 mesh 能够平滑过度,最终利用输出的 mesh 对全图进行 warp,这样就得到了校正后的图像。
Subject Mask Segmentation
人脸区域分割,这个已经非常成熟了,有很多的分割模型都可以做到这一点。这里就不多做介绍了。
Stereographic Projection
这篇文章对人脸区域的校正利用了一种称为 Stereographic Projection,也就是球极投影,球极投影是一种将 3D 物体投影到 2D 平面的投影方式,这种投影方式可以最大限度的保持物体的形状,不过代价就是会让直线变得弯曲,文章也给出了几种不同投影的例子

可以看到,对于一张有透视畸变的图像,人像的脸已经有明显的拉伸,通过 Stereographic projection 或者 Mercator projection,人脸得到比较好地校正,但是背景的直线已经产生了明显的弯曲,这就类似一种鱼和熊掌不可兼得的感觉,你想保证背景直线是直的,人脸区域会被拉伸,类似输入图;反过来,你想让人脸区域得到校正,背景直线又变得弯曲。所以文章作者想到了一种联合优化的方式,这个后面详细介绍,先来看看球极投影到底是个啥。
文章给出的球极投影的定义如下:
r u = r 0 tan ( 0.5 arctan ( r p f ) ) (1) r_u = r_0 \tan (0.5 \arctan(\frac{r_p}{f})) \tag{1} ru=r0tan(0.5arctan(frp))(1)
其中 f f f 是镜头的焦距, r u , r p r_u, r_p ru,rp 分别表示球极投影以及透视投影下以镜头中心作为参考的半径, r 0 r_0 r0 表示一个 scale 系数,保证两种投影下面图像边缘的所对应的半径是相等的
r 0 = d 2 tan ( 0.5 arctan ( d 2 f ) ) (2) r_0 = \frac{d}{2 \tan (0.5 \arctan(\frac{d}{2f}))} \tag{2} r0=2tan(0.5arctan(2fd))d(2)
其中, d = min { W , H } d = \min\{W, H\} d=min{W,H},表示图像宽高中的较小值。
Mesh Placement
接下来介绍 mesh 的构建,mesh 可以看成是一个网格图,一个 mesh 包含一组网格点 { v i } \{ \mathbf{v}_i \} {vi}, v i \mathbf{v}_i vi 是一个向量,表示网格点对应的二维坐标,假设输入图对应的 mesh 图是 { p i } \{ \mathbf{p}_i \} {pi},对输入图 mesh 上的每个网格点应用球极变换,可以得到一组新的网格点,以及一个新的 mesh, { u i } \{ \mathbf{u}_i \} {ui},这两个 mesh 对应网格点的坐标差,其实就是位移向量场,通过这个位移向量场,可以进行 warp,不过正如前面所说,如果直接 warp,人脸区域虽然得到了校正,但是背景会产生扭曲。当然,一种最直观的方法,就是将人脸区域的 mesh 与背景区域的 mesh 分开处理,人脸区域的 mesh 用球极投影下的 mesh,而背景区域依然用之前输入的 mesh。如下式所示:
w i = { 0 if p i ∉ face mask 1 if p i ∈ face mask (3) w_i = \begin{cases} 0 \quad \text{if} \quad \mathbf{p}_i \notin \text{face mask} \\ 1 \quad \text{if} \quad \mathbf{p}_i \in \text{face mask} \\ \end{cases} \tag{3} wi={0ifpi∈/face mask1ifpi∈face mask(3)
不过这种方式依然会有问题,文章也给出了示意图,这种直接粗暴地分成两部分的方式,也会到底非常明显的 artifacts
Local Face Undistortion
为了解决这个问题,文章作者提出了一种能量优化的方式,文章中构造了一个如下的能量优化函数:
v i ∗ = argmin v i E t ( v i ) (4) \mathbf{v_{i}^{*}} = \text{argmin}_{\mathbf{v_{i}}} E_t(\mathbf{v_{i}}) \tag{4} vi∗=argminviEt(vi)(4)
E t E_t Et 可以认为是几种不同的能量函数的加权和。
Face Objective Term
首先是人脸区域的能量项,每个人脸区域都构建一个能量项,所有人脸区域的能量项求和,可以得到整体的人脸区域的能量项
E f = ∑ k E s , k (5) E_f = \sum_{k} E_{s, k} \tag{5} Ef=k∑Es,k(5)
其中, k k k 表示输入图中人脸的编号,可以看到,这个能量项是对每个人脸区域单独构建的,有多少个人脸,就会构建多少个能量项,每个能量项的定义如下:
E s , k = ∑ i ∈ B k w i m i ∥ v i − ( S k u i + t k ) ∥ 2 2 + λ ( S k ) (6) E_{s,k} = \sum_{i\in\mathbf{B}_k} w_i m_i \left \| \mathbf{v}_i - (\mathbf{S_k \mathbf{u}_i + \mathbf{t}_k}) \right \|_{2}^{2} + \lambda(\mathbf{S}_k) \tag{6} Es,k=i∈Bk∑wimi∥vi−(Skui+tk)∥22+λ(Sk)(6)
其中, w i w_i wi 表示公式 (3) 定义的权重, { u i } \{ \mathbf{u}_i \} {ui} 表示球极投影 mesh 上的网格点, { B k } \{ \mathbf{B}_k \} {Bk} 表示第 k 个人脸区域中的网格点,因为图像不同区域的畸变程度不同,需要校正的强度也就不同,所以上面的能量项还加了一个 m i m_i mi 来调整权重,这个 m_i 服从一个径向函数的分布
m i ∼ 1 1 + exp ( ( − ( r − r a ) / r b ) ) m_i \sim \frac{1}{1 + \exp((-(r-r_a)/r_b))} mi∼1+exp((−(r−ra)/rb))1
其中, r r r 表示输入图像中的半径, r a , r b r_a,r_b ra,rb 是两个超参,用来控制强度的,对于图像中心的点,保证 m i = 0.01 m_i = 0.01 mi=0.01,对于图像边缘的点,保证 m i = 1.0 m_i=1.0 mi=1.0。从公式 (6) 可以看出,虽然文章是用球极投影来解决人脸的畸变,但是最终优化的时候,并不是简单地直接用球极投影的网格点,而是用了一个仿射变换来拟合,
S k = [ a k b k − b k a k ] t k = [ t k 1 t k 2 ] (7) \mathbf{S}_k = \begin{bmatrix} a_k & b_k \\ -b_k & a_k \end{bmatrix} \quad \mathbf{t}_k = \begin{bmatrix} t_{k1} \\ t_{k2} \end{bmatrix} \tag{7} Sk=[ak−bkbkak]tk=[tk1tk2](7)
这个仿射变换,可以让每个人脸区域的球极投影有更大的自由度,在球极投影的基础上,进行适当的自适应调整。公式 (7) 中的 a k a_k ak 是一个缩放系数,文章作者加了一个正则项来控制这个系数:
λ ( S k ) = w s ∥ a k − s t ∥ 2 2 (8) \lambda(\mathbf{S}_k) = w_s \left \| a_k - s_t \right \|_{2}^{2} \tag{8} λ(Sk)=ws∥ak−st∥22(8)
文章中设置的 w s = 2000 , s t = 1 w_s = 2000, s_t = 1 ws=2000,st=1
Line-Bending Term
人脸区域的能量项介绍完了,下面看看背景区域的能量项,文章中设置了一个能量项来保证让直线等比缩放而不是扭曲:
E b = ∑ i ∑ j ∈ N ( i ) ∥ ( v i − v j ) × e i j ∥ 2 2 (9) E_{b} = \sum_{i} \sum_{j \in N(i)} \left \| (\mathbf{v}_i - \mathbf{v}_j) \times \mathbf{e}_{ij} \right \|_{2}^{2} \tag{9} Eb=i∑j∈N(i)∑∥(vi−vj)×eij∥22(9)
其中, e i j \mathbf{e}_{ij} eij 是沿着方向 p i − p j \mathbf{p}_i - \mathbf{p}_j pi−pj 的单位向量。 N ( i ) N(i) N(i) 表示网格点 i i i 的邻域
Regularization Term
最后,文章中引入了一个平滑的能量项,
E r = ∑ i ∑ j ∈ N ( i ) ∥ ( v i − v j ) ∥ 2 2 (10) E_{r} = \sum_{i} \sum_{j \in N(i)} \left \| (\mathbf{v}_i - \mathbf{v}_j) \right \|_{2}^{2} \tag{10} Er=i∑j∈N(i)∑∥(vi−vj)∥22(10)
Mesh Boundary Extension
文章中也提到,对于图像边缘的点,如果强制让其不移动的话,当人脸处于图像边缘的时候,会产生很明显的扭曲,为了解决这个问题,文章中采用网格扩展的方式,在原图的 mesh 基础上,往外扩展几个网格,同时让这些处于边界的网格点满足如下的约束:
{ v i , x = p i , x if p i ∈ left or right boundary v i , y = p i , y if p i ∈ top or bottom boundary (11) \begin{cases} v_{i,x} = p_{i,x} \quad \text{if} \quad \mathbf{p}_i \in \text{left or right boundary} \\ v_{i,y} = p_{i,y} \quad \text{if} \quad \mathbf{p}_i \in \text{top or bottom boundary} \\ \end{cases} \tag{11} {vi,x=pi,xifpi∈left or right boundaryvi,y=pi,yifpi∈top or bottom boundary(11)
这个约束保证了边界的点只会沿着边界移动,同时,为了减少 mesh warping 出现的未定义区域,文章中还利用了一个能量项,让原始 mesh 边缘的网格点尽量往外扩,而不是往内缩:
E a = E l + E r + E t + E b (12) E_a = E_l + E_r + E_t + E_b \tag{12} Ea=El+Er+Et+Eb(12)
{ E l = I ( v i , x > 0 ) ⋅ ∥ v i , x ∥ 2 2 , ∀ i ∈ ∂ l e f t E r = I ( v i , x < W ) ⋅ ∥ v i , x − W ∥ 2 2 , ∀ i ∈ ∂ r i g h t E t = I ( v i , y > 0 ) ⋅ ∥ v i , y ∥ 2 2 , ∀ i ∈ ∂ t o p E b = I ( v i , y < H ) ⋅ ∥ v i , y − H ∥ 2 2 , ∀ i ∈ ∂ b o t t o m (13) \begin{cases} E_l = \Bbb I(v_{i,x} > 0) \cdot \left \| v_{i,x} \right \|_{2}^{2}, \forall i\in \partial_{left} \\ E_r = \Bbb I(v_{i,x} < W) \cdot \left \| v_{i,x} -W \right \|_{2}^{2}, \forall i\in \partial_{right} \\ E_t = \Bbb I(v_{i,y} > 0) \cdot \left \| v_{i,y} \right \|_{2}^{2}, \forall i\in \partial_{top} \\ E_b = \Bbb I(v_{i,y} < H) \cdot \left \| v_{i,y} - H \right \|_{2}^{2}, \forall i\in \partial_{bottom} \\ \tag{13} \end{cases} ⎩ ⎨ ⎧El=I(vi,x>0)⋅∥vi,x∥22,∀i∈∂leftEr=I(vi,x<W)⋅∥vi,x−W∥22,∀i∈∂rightEt=I(vi,y>0)⋅∥vi,y∥22,∀i∈∂topEb=I(vi,y<H)⋅∥vi,y−H∥22,∀i∈∂bottom(13)
Optimization
最后的能量函数,就是将前面定义的能量函数加权:
E t = λ f E f + λ b E b + λ r E r + λ a E a (14) E_t = \lambda_{f}E_f + \lambda_{b}E_b + \lambda_{r}E_r + \lambda_{a}E_a \tag{14} Et=λfEf+λbEb+λrEr+λaEa(14)
对应权重分别设为:4,2,0.5,4
为了加速优化,文章在初始化的时候,也做了一些 trick:

最后 warp 的时候,文章中将优化得到的 mesh 还做了一个类似归一化的操作:
v n , i = s g ( v i ∗ + t g ) t g = − v 0 ∗ \mathbf{v}_{n, i} = s_g(\mathbf{v}_{i}^{*} + \mathbf{t}_g) \quad \mathbf{t}_g = -\mathbf{v}_{0}^{*} vn,i=sg(vi∗+tg)tg=−v0∗
最后的效果还是不错的,具体的样例可以看文章的 project 网站:
https://people.csail.mit.edu/yichangshih/wide_angle_portrait/