基于arduino超声波测距学习
``# HC-SRO4 超声波测距
VCC 是HC-SR04超声波距离传感器的电源,我们连接了Arduino上的5V引脚。
Trig (Trigger) 引脚用于触发超声波脉冲。(A0)
Echo 回声当接收到反射信号时,引脚产生一个脉冲。脉冲的长度与检测发射信号所需的时间成正比。(A1)
GND 应该连接到Arduino的地。
int TrgPin = A0;
int EcoPin = A1;
float dist;
void setup()
{
Serial.begin(9600);
//设置TrgPin为输出状态
pinMode(TrgPin, OUTPUT);
// 设置EcoPin为输入状态
pinMode(EcoPin, INPUT);
}
void loop()
{
digitalWrite(TrgPin, LOW);
delayMicroseconds(8);
digitalWrite(TrgPin, HIGH);
// 维持10毫秒高电平用来产生一个脉冲
delayMicroseconds(10);
digitalWrite(TrgPin, LOW);
// 读取脉冲的宽度并换算成距离
dist = pulseIn(EcoPin, HIGH) / 58.00;
Serial.print("Distance:");
Serial.print(dist);
Serial.println("cm");
delay(300);
}
PULSEIN
读引脚的脉冲信号, 被读取的脉冲信号可以是 HIGH 或 LOW. 例如我们要检测HIGH脉冲信号, Arduino将在引脚变为高电平时开始计时, 当引脚变为低电平时停止记时,并返回脉冲持续时长(时间单位:微秒)。如果在超时时间内没有读到脉冲信号的话, 将返回0.
根据经验发现,pulseIn()函数在检测脉冲间隔过短的信号时会产生错误。Arduino可检测的脉冲间隔时间范围是10微秒到3分钟。请留意假如调用pulseIn()函数时读取信号的引脚上已经为高电平,此时Arduino将等待该引脚变为低电平以后再开始检测脉冲信号。另外只有Arduino的中断是开启时,才能使用pulseIn()。
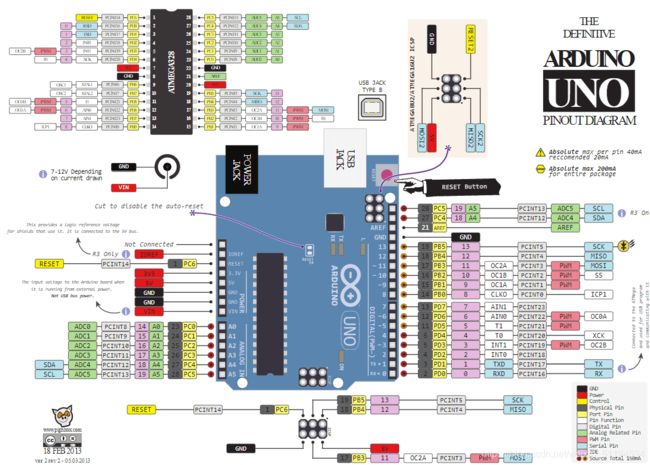
先了解arduino的功能
找到超声波接口
了解LCD1602显示屏
LCD1602
是一种工业字符型液晶,能够同时显示16x02即32个字符。LCD1602液晶显示的原理是利用液晶的物理特性,通过电压对其显示区域进行控制,即可以显示出图形。
转接板
SDA----数据线 SCL-----控制线
是SCL\SDA是I2C总线的信号线.
SDA是双向数据线,SCL是时钟线SCL.在I2C 总线上传送数据,首先送最高位,由主机发出启动信号
SDA在SCL 高电平期间由高电平跳变为低电平,然后由主机发送一个字节的数据.
数据传送完毕,由主机发出停止信号,SDA在SCL 高电平期间由低电平跳变为高电平.
I2C总线在传送数据过程中共有三种类型信号, 它们分别是:开始信号、结束信号和应答信号。
开始信号:SCL为高电平时,SDA由高电平向低电平跳变,开始传送数据。
结束信号:SCL为高电平时,SDA由低电平向高电平跳变,结束传送数据。
应答信号:接收数据的IC在接收到8bit数据后,向发送数据的IC发出特定的低电平脉冲,表示已收到数据。CPU向受控单元发出一个信号后,等待受控单元发出一个应答信号,CPU接收到应答信号后,根据实际情况作出是否继续传递信号的判断。若未收到应答信号,由判断为受控单元出现故障。
// include the library code
#include 显示屏
*/
#include 尝试使用带有转接板的LCD1602显示超声波测距的数据
#include