显示 torch.tensor 图像卷积特征图
显示 torch.tensor图像卷积特征图
-
- 1.定义特征显示函数
- 2.定义一个卷积提取网络(博文里面使用的是keras,我这边改成了pytorch)
- 3. 运行实例
参考博文:https://blog.csdn.net/dcrmg/article/details/81255498/
1.定义特征显示函数
def get_row_col(num_pic):
squr = num_pic ** 0.5
row = round(squr)
col = row + 1 if squr - row > 0 else row
return row, col
def visualize_feature_map(img_batch):
img_batch = img_batch.detach().numpy()
feature_map = np.squeeze(img_batch, axis=0)
print(feature_map.shape)
feature_map_combination = []
plt.figure()
num_pic = feature_map.shape[0]
row, col = get_row_col(num_pic)
for i in range(0, num_pic):
feature_map_split = feature_map[i, :, :]
feature_map_combination.append(feature_map_split)
plt.subplot(row, col, i + 1)
plt.imshow(feature_map_split)
axis('off')
# title('feature_map_{}'.format(i))
plt.savefig('feature_map.png')
plt.show()
# 各个特征图按1:1 叠加
feature_map_sum = sum(ele for ele in feature_map_combination)
plt.imshow(feature_map_sum)
plt.savefig("feature_map_sum.png")
2.定义一个卷积提取网络(博文里面使用的是keras,我这边改成了pytorch)
def create_model(use_bias=True):
model = nn.Sequential()
# 第一层CNN
model.append(nn.Conv2d(3, 64,kernel_size=3,stride=1, padding=1,bias=use_bias))
model.append(nn.BatchNorm2d(64))
model.append(nn.LeakyReLU(0.2, True))
model.append(nn.MaxPool2d(kernel_size=2, stride=2))
# 第二层CNN
model.append(nn.Conv2d(64, 64, kernel_size=3, stride=1, padding=1, bias=use_bias))
model.append(nn.BatchNorm2d(64))
model.append(nn.LeakyReLU(0.2, True))
model.append(nn.MaxPool2d(kernel_size=2, stride=2))
# 第三层CNN
model.append(nn.Conv2d(64, 64, kernel_size=3, stride=1, padding=1, bias=use_bias))
model.append(nn.BatchNorm2d(64))
model.append(nn.LeakyReLU(0.2, True))
# 第三层CNN
model.append(nn.Conv2d(64, 64, kernel_size=3, stride=1, padding=1, bias=use_bias))
model.append(nn.BatchNorm2d(64))
model.append(nn.LeakyReLU(0.2, True))
return model
def forward(self, inputs):
x = model(inputs)
return x
3. 运行实例
先贴一张图

代码:图像格式要转一下,否则会出错
# coding: utf-8
import torch
from PIL import Image
from pylab import *
import torch.nn as nn
if __name__ == "__main__":
#img = cv2.imread('001.jpg')
img = Image.open('001.jpg')
img = np.array(img)
img = img.transpose(2, 0, 1)
img_tensor = torch.from_numpy(img).float()
img_tensor = torch.unsqueeze(img_tensor, 0)
model = create_model()
model.eval()
# img_batch = np.expand_dims(img, axis=0)
conv_img = model(img_tensor) # conv_img 卷积结果
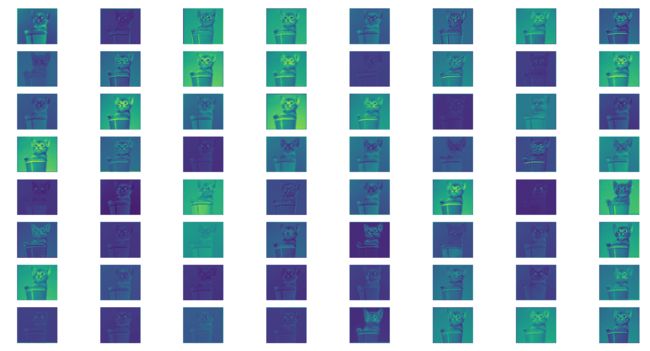
visualize_feature_map(conv_img)
运行结果: