《probabilistic robotics》学习笔记——卡尔曼滤波
机器人系列文章目录
第一章 ubuntu16.04系统及相关软件安装
第二章 Linux操作系统入门笔记
第三章 ROS系统架构及程序编写过程
第四章 《probabilistic robotics》学习笔记
本章目录
- 机器人系列文章目录
- chpt1 绪论
- chpt2 递归状态估计
-
- 2.2 概率论概念
- 2.3 机器人环境交互
-
- 2.3.4 Belief Distribution
- 2.4 贝叶斯滤波算法
- chpt3 高斯滤波器
-
- 3.2 卡尔曼滤波器
- 3.3 扩展的卡尔曼滤波
- 3.4 无迹卡尔曼滤波
- 3.5 信息滤波器The Information Filter
chpt1 绪论
probabilistic robotics核心是estimating state from sensor data。用概率理论的运算去明确地表示机器人感知和行为的不确定性。即,不再只依赖可能出现情况的单一的“最好推测best guess”,而是用概率算法来表示在整个推测空间的概率分布信息。
eg1:Markov localization
eg2:coastal navigation
chpt2 递归状态估计
2.2 概率论概念
全概率公式p16
贝叶斯公式
先验概率(prior probability):p(x)
后验概率(posterior probability):p(x|y)
多条件贝叶斯概率
期望
熵(entropy)p18
注:公式参考:https://www.jianshu.com/p/37daf3b83ffc
2.3 机器人环境交互
2.3.1 state
state用于表示环境
pose包含location和orientation
1.位置(x,y,z)
机器人中二维只用到x,y。
坐标系为右手系:朝前的方向为x轴;各轴正方向同样为右手系。
2.欧拉角(roll,pitch,yaw)
翻滚角,俯仰角,偏航角。只用到yaw。
3.Quaternion(四元数)q=w+xi+yj+zk( w 是实数,x,y,z是虚数)=[[w,v]] (v=(x,y,z)是四维空间的矢量,w是标量)底层代码需要。转换为欧拉角时,只有yaw有值。
4.速度:线速度、角速度。只需要两个参数x和theta。
2.3.2 environment interaction
measurement利用传感器获取环境状态
Control actions
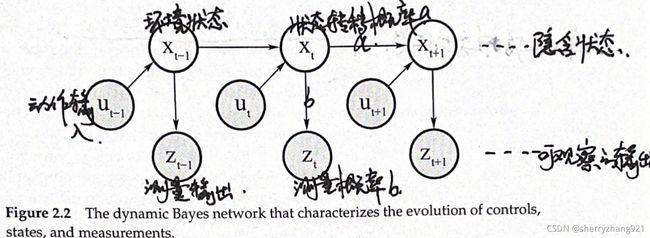
2.3.3 probabilistic generative laws
1.状态转移概率:
Xt只与Xt-1和ut有关:p(xt|xt-1,ut)
2.测量概率:
Zt只与Xt有关:p(zt|xt)
2.3.4 Belief Distribution
反映了机器人有关环境状态的内部信息。由坐标数据推导出位姿。
假设机器人通过条件概率分布表示belief,belief distribution为每一个可能的假设分配一个概率(概率密度值)。置信度分布是以可以获得的数据为条件的关于状态变量的后验概率,用bel(xt)表示,xt是state variable状态变量。这个后验是时刻t下状态xt的概率分布,以过去所有的变量x1:t和所有过去的控制u1:t为条件:
**bel(xt)=p(xt|z1:t,u1:t)**打喷嚏时避免向着其他的人
默认的置信度是综合了测量zt后得到的,但是在刚刚执行ut之后,综合zt之前计算后验是十分有用的,这样的后验就可以表示为:
bel (xt)=p(xt|z1:t−1,u1:t)
在概率滤波的框架下此概率经常被称为预测(prediction),bel (xt)是基于以前状态的后验,在综合时刻t的测量之前预测了时刻t的状态,由bel (xt)计算bel(xt)称为修正(correction)或测量更新(measurement update)
2.4 贝叶斯滤波算法
用于估计环境和机器人状态。
给出所有过去的传感器测量和控制数据,计算xt状态的后验,即bel。

推导过程:略
推导假设世界是马尔科夫的,即状态是完整的
具体实现条件:
1.初始置信initial belief:p(x0)
2.测量概率measurement probability:p(zt|xt)
3.状态转移概率state transition probability:p(xt|ut,xt-1)
2.4.4 马尔科夫假设
Markov assumption or complete state assumption(状态完备假设)
过去和未来的数据独立
一般经验法则:定义状态xt时要excise care(以便unmodeled state variables有接近随机的影响)
chpt3 高斯滤波器
是一类递归状态的估计。是贝叶斯滤波器在连续空间中的实现。
基本思想:belief置信由多元正态分布表示。
其中高斯函数单峰unimodal;高斯分布的均值和协方差表示称为矩参数moments parameterization
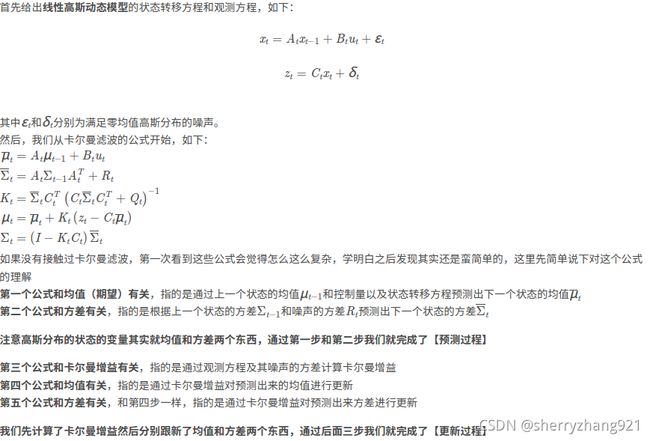
3.2 卡尔曼滤波器
线性高斯
用于连续状态的belief计算,由矩参数表示。
若如下三个性质不变,且满足贝叶斯滤波器的马尔科夫假设,则后验为高斯:
状态转移概率是带有随机高斯噪声的参数的线性函数;测量概率与带有高斯噪声的自变量呈线性关系;初始置信度是正态分布的。
KF 表示均值为μ_t、方差为 sigma_t的在时刻 t 的置信度 bel(x,) 。 KF 的输入就是 t - 1 时刻的置信度,其均值和
方差分别用μ_t-1 和 sigma_t-1 表示。为了更新这些参数, KF 需要控制向量 u_t和测量向量 z_t。输出的是时刻 t 的置信度,均值为μ_t、方差为 sigma_t.
以下版权:https://blog.csdn.net/weixin_44580210/article/details/90417331
 A :状态转移系数矩阵,n×n
A :状态转移系数矩阵,n×n
B :可选的控制输入的增益矩阵
R :过程激励噪声的协方差矩阵
C :量测系数矩阵,m×n
Q :测量噪声协方差矩阵
3.3 扩展的卡尔曼滤波
非线性高斯系统
放宽了一个假设:线性化假设。这里假设状态转移概率和测量概率分别由非线性函数控制。
为线性化:一阶泰勒展开,从状态转移方程和测量方程中线性化得到两个雅可比矩阵:G_t,H_t

3.4 无迹卡尔曼滤波
线性化的另一种方法:通过使用加权统计线性回归过程实现随机线性化。
即无迹变换(unscented transform):主要通过n个在先验分布中采集的点(我们把它们叫sigma points)的线性回归来线性化随机变量的非线性函数。
对比:由于我们考虑的是随机变量的扩展,所以这种UKF线性化要比泰勒级数线性化(EKF所使用的策略)更准确;UKF能有效地克服EKF估计精度低、稳定性差的问题,因为不用忽略高阶项,所以对于非线性分布统计量的计算精度高,能有效地克服EKF估计精度低、稳定性差的问题。
————————————————
版权文链接:https://blog.csdn.net/weixin_42905141/article/details/99710297
算法:分为预测和更新,见上文后半部分。
3.5 信息滤波器The Information Filter
信息滤波使用 信息矩阵和信息矢量 进行迭代,它是kalman滤波的信息格式,利用矩阵的稀疏性优化效率