微分几何笔记(2) —— 曲线的参数化
第二周讲完了Klingenberg的第一章Curves,做一点微小的笔记。
分成三个部分,本篇讲曲线的弧长参数;下一篇讲一般的Frenet标架及方程组;再下一篇讲二维三维空间曲线的curvature。
GTM51对入门者会难一些,因为直接从最一般的 n n n维情况入手,再回头看二三维空间中的曲线,相比之下 Calculus and Analysis in Euclidean Space 这本UTM的Chapter 8 Parametrized Curves 算是相当新手友好的入门内容,由二三维曲线推广到一般情况。
借用宋老师的话,微分几何的本质是几何,主要通过微积分的手段,用数和函数来刻画几何图形的性质。可能在学习的时候会觉得明明很直观,几何画出来就是这样的,但是要用规范的严格语言说出来很困难。所以说也是一个打基础的课程,先学会怎样严格的表述,在这基础之上才能正确的使用微积分这个工具。
2.1 参数曲线(Parametrized Curves)
Definition 2.1.1 参数曲线 是指一个光滑映射(smooth mapping): c : I → R n c: I \rightarrow \mathbb{R}^n c:I→Rn 这里 n ≥ 1 n \geq 1 n≥1, I ⊆ R n I\subseteq \mathbb{R}^n I⊆Rn 且非空。
更进一步,如果 ∀ t ∈ I , c ′ ( t ) ≠ 0 \forall t\in I, c'(t)\neq0 ∀t∈I,c′(t)=0,称这样的曲线是正则的(regular).
也就是说我们平时说的“曲线”,其实是一个映射,平时说“点在曲线上”,是指这一点,如 c ( t ) c(t) c(t)在这个映射的像集中。
我们一般都要求曲线是正则的,因为是光滑映射,所以导数不等于零 ⇔ \Leftrightarrow ⇔导数的范数不等于零,直观理解是这样的曲线是不会停下的,也因此我们可以用隐函数定理,反函数定理等。
如果 I I I是不是开区间,定义的意思是,存在一个包含 I I I的开区间 I ∗ I^* I∗,使得 c ∗ c^* c∗在 I ∗ I^* I∗上是一个光滑映射,并且 c ∗ ∣ I = c c^*|I=c c∗∣I=c,这样就解决了端点无定义的问题。
这里我们说的参数曲线都是“光滑”的,这个要求也太高了,不过现在考虑的都是很显然,一眼能够看明白的曲线,以后会逐步放宽。
Definition 2.1.2
i)切空间(Tangent Space):
对 x 0 ∈ R n x_0 \in \mathbb{R}^n x0∈Rn,切空间是指所有以 x 0 x_0 x0为起点的 n n n维向量所构成的空间,记作 T x 0 R n T_{x_0} \mathbb{R}^n Tx0Rn.
ii)沿着曲线 c c c的向量场(Vector field along c : I → R n c: I \rightarrow \mathbb{R}^n c:I→Rn):
指一个可微映射 X : I → R n X: I\rightarrow \mathbb{R}^n X:I→Rn, ∀ t ∈ I \forall t\in I ∀t∈I, X ( t ) ∈ T c ( t ) R n X(t) \in T_{c(t)} \mathbb{R}^n X(t)∈Tc(t)Rn.
iii)切向量场(Tangent vector field of c : I → R n c: I \rightarrow \mathbb{R}^n c:I→Rn):
指一个沿着 c c c的向量场,其中在 c ( t ) c(t) c(t)处的向量由切向量 t ↦ c ′ ( t ) t \mapsto c'(t) t↦c′(t)给出。
这里主要是规定向量的起点位于什么地方。
切空间是相当于把 x 0 x_0 x0当成原点所建立的 R n \mathbb{R}^n Rn空间,所有 x 0 ∈ R n x_0 \in \mathbb{R}^n x0∈Rn中向量起于 x 0 x_0 x0.
沿着曲线的向量场是指在曲线的每一点上都"生长"着一些向量,比如下图中所示那样:
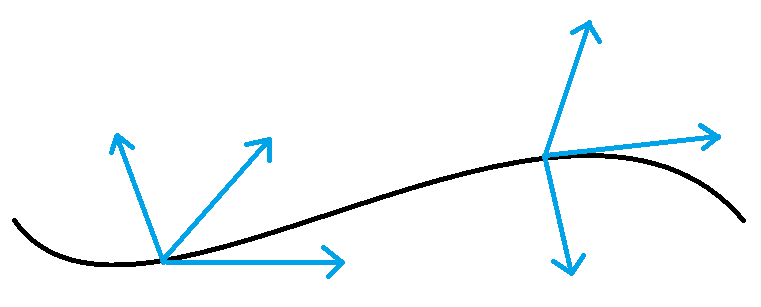
图1:生长在曲线上的向量场
接下来一节讲讲弧长参数曲线(parametrization by arc length),用曲线的弧长做参数,这样做可以简化计算过程。
2.2 弧长参数曲线(Parametrization by Arc Length)
Definition 2.2.1 如果一个映射 ϕ : I → I ′ \phi: I\rightarrow I' ϕ:I→I′是光滑的,而且其逆映射 ϕ − 1 : I ′ → I \phi^{-1}: I'\rightarrow I ϕ−1:I′→I也是光滑的,称映射 ϕ \phi ϕ是微分同胚(Diffeomorphism)
Definition 2.2.2(Equivalence of Curves) 两条曲线 c : I → R n c: I \rightarrow \mathbb{R}^n c:I→Rn 和 c ~ : I ~ → R n \tilde{c} : \tilde{I} \rightarrow \mathbb{R}^n c~:I~→Rn 之间如果存在一个微分同胚 ϕ \phi ϕ,使得 c ~ = c ∘ ϕ \tilde{c}=c\circ \phi c~=c∘ϕ,则称 ϕ \phi ϕ是一个参数变换(parameter transformation).并且如果 ϕ ′ > 0 \phi'>0 ϕ′>0,称这样的参数变换是保持定向的(orientation preserving) .
由参数变换所得的曲线构成一个所有 R n \mathbb{R}^n Rn中曲线的等价类(满足自反性(reflexive),对称性(symmetric)和传递性(transitive)),给这个等价类起个名字叫做 非参数化曲线(unparametrized curve).
其实我们可以把 I I I看成是关于时间的集合,把 c ( t ) c(t) c(t)看成一个空间中随时间运动的轨迹,这样 c ′ ( t ) c'(t) c′(t)就是速度,而 ∣ c ′ ( t ) ∣ |c'(t)| ∣c′(t)∣则是速率。通过不同的参数变换,改变了质点沿曲线运动一定长度所需要的时间(区间 I I I的长度),从而改变了质点运动的速率。我们特别关注的,是其中以单位速度运动的参数曲线,也就是 ∣ c ′ ( s ) ∣ = 1 |c'(s)|=1 ∣c′(s)∣=1 的曲线。
Definition 2.2.3 (Arc length of a curve) 光滑曲线 c : I → R n c: I \rightarrow \mathbb{R}^n c:I→Rn上两点 t 0 , t ∈ I , t 0 < t t_0,t\in I, t_0
L ( t 0 , t ) = ∫ t 0 t ∣ c ′ ( τ ) ∣ d τ L(t_0,t)=\int_{t_0}^{t}|c'(\tau)|d\tau L(t0,t)=∫t0t∣c′(τ)∣dτ.
事实上,这个积分对于 C 1 C^1 C1及更好的曲线都是well-define的,但是对连续的曲线不一定对,因为存在在闭区间上长度无穷的连续曲线。
比如 y = s i n 1 x y=sin\frac{1}{x} y=sinx1 在 x = 0 x=0 x=0 附近非道路连通;
比如把 [ 0 , 1 ] [0,1] [0,1]映射到 [ 0 , 1 ] × [ 0 , 1 [0,1]\times[0,1 [0,1]×[0,1的皮亚诺曲线;
再比如可以构造出 [ 0 , 1 ] → [ 0 , 1 ] × [ 0 , 1 ] [0,1]\rightarrow [0,1]\times[0,1] [0,1]→[0,1]×[0,1]的双射:https://www.zhihu.com/question/301263376
把有限弧长的连续曲线,称为可求长曲线(rectifiable curve)
Definition 2.2.4 (Parametrization by arc length) 曲线 c ( s ) c(s) c(s)称为弧长参数化的,如果 L ( s 0 , s ) = s − s 0 L(s_0,s)=s-s_0 L(s0,s)=s−s0,等价的说, ∣ c ′ ( s ) ∣ = 1 , ∀ s ∈ I |c'(s)|=1, \forall s\in I ∣c′(s)∣=1,∀s∈I.
试想,现在我们通过改变曲线的参数,使得之前需要通过复杂的含绝对值积分才能得到的弧长,现在只需要做差就能够得到。通过这种方式,让计算变得如此简单,如果对后面计算曲率的过程有了解,就能感觉到这是一件非常令人振奋的事情,而且要是能把任意曲线都弧长参数化,那这事已经好的不能再好了。
直觉上来说这事肯定是对的,因为弧长参数化的直观理解就是以单位速度沿着曲线运动,这只要曲线本身的光滑程度够就行。
那既然是以单位速度沿着曲线运动,我只要以弧长为参数不就好了吗?这样用原来给定参数曲线的弧长来做参数,经过一个单位时间,等于经过一个单位弧长,等于沿弧长以单位速度运动。太妙了。
接下来是本篇笔记铺垫到现在,为了阐述的主要命题:
Proposition 2.2.5 每一个正则曲线(Regular Curve)都等价于一个弧长参数化曲线。
Proof .
存在性:假设 c : I → R n , t ↦ c ( t ) c: I \rightarrow \mathbb{R}^n,t\mapsto c(t) c:I→Rn,t↦c(t)为一光滑曲线,我们想找一个 c ~ : I ~ → R n , s ↦ c ~ ( s ) \tilde{c}: \tilde{I} \rightarrow \mathbb{R}^n, s\mapsto \tilde{c}(s) c~:I~→Rn,s↦c~(s),满足 c ( t ) c(t) c(t)和 c ~ ( s ) \tilde{c}(s) c~(s)的像集是一模一样的。
为此我们需要找一个映射 ℓ : I → I ~ \ell: I\rightarrow\tilde{I} ℓ:I→I~. 之前我们考虑过,以 c c c的弧长,来作为 c ~ \tilde{c} c~的参数,也就是 s = ℓ ( t ) = ∫ t 0 t ∣ c ′ ( τ ) ∣ d τ s=\ell(t)=\int^{t}_{t_0}|c'(\tau)|d\tau s=ℓ(t)=∫t0t∣c′(τ)∣dτ,写成交换图的形式:

因为 ℓ ′ ( t ) = ∣ c ′ ( t ) ∣ > 0 \ell'(t)=|c'(t)|>0 ℓ′(t)=∣c′(t)∣>0 (c is regular), 由反函数定理知道反函数存在且可导。这样,我们把交换图上边以 t t t为参数的映射,转化成了下边以 s s s为参数的映射,接下来只需要验证 ∣ c ~ ′ ( s ) ∣ = 1 |\tilde{c}'(s)|=1 ∣c~′(s)∣=1,由隐函数求导法则以及变上限函数的导数:
c ′ ( t ) = c ~ ′ ( ℓ ( t ) ) = c ~ ′ ( s ) ℓ ′ ( t ) = c ~ ′ ( s ) ∣ c ′ ( t ) ∣ c'(t)=\tilde{c}'(\ell(t))=\tilde{c}'(s)\ell'(t)=\tilde{c}'(s)|c'(t)| c′(t)=c~′(ℓ(t))=c~′(s)ℓ′(t)=c~′(s)∣c′(t)∣
两边同时取绝对值,就得到了结论,存在性得证,并且知道 c ~ ( s ) = c ∘ ℓ − 1 ( s ) \tilde{c}(s)=c \circ \ell^{-1} (s) c~(s)=c∘ℓ−1(s).
唯一性是显然的,假设有两条参数曲线都满足条件导数为1,因为是正则曲线,所以其导数可以去掉绝对值,同时积分。这样可以看出,参数起始于同一点的弧长参数化曲线是唯一的,证毕。
2.3 一般参数曲线化成弧长参数曲线的例子
怎么把一般参数曲线化成弧长参数曲线,其实在上面命题的证明中已经构造出来了。
数学证明很多时候是构造性的,怎么证明,就怎么使用;而有的证明只是用严格话的语言论述,说明条件满足某些定义,这种证明算是在教我们该怎么“说话”。二者都是需要的,但是对于推动数学进展来说,更重要的是前者,因为启发性更强,毕竟,好的证明使我们更加聪明。
这里求 ℓ − 1 \ell^{-1} ℓ−1可能会是很困难的一步,因为 ℓ \ell ℓ本来是个积分函数,且变量在积分上限,这就意味着很多时候,我们只能在形式上表示出来,并不能真正求出 ℓ − 1 \ell^{-1} ℓ−1(which mathematicians always say.)
举两个能求出来弧长参数化曲线的例子:
Example 2.3.1 c : R → R 2 c: \mathbb{R}\rightarrow \mathbb{R}^2 c:R→R2, given by c ( t ) = ( cos e t , sin e t ) c(t)=(\cos e^t, \sin e^t) c(t)=(coset,sinet).
这个形式一看就跟圆脱不了关系,只是问题在于他不是以单位速度沿圆周运动的,那么将他弧长参数化之后,应该会变成标准圆的参数方程才对。
Solution:
先确定自变量的范围,这里 t ∈ ( − ∞ , ∞ ) t\in(- \infty , \infty) t∈(−∞,∞),
s = ℓ ( t ) = ∫ − ∞ t ∣ c ′ ( τ ) ∣ d τ = ∫ − ∞ t e τ d τ = e t , s ∈ ( 0 , ∞ ) s=\ell(t)=\int^t_{-\infty}|c'(\tau)|d\tau=\int^t_{-\infty}e^{\tau}d\tau=e^t, s\in(0,\infty) s=ℓ(t)=∫−∞t∣c′(τ)∣dτ=∫−∞teτdτ=et,s∈(0,∞)
所以 t = ℓ − 1 ( s ) = ln s , s ∈ ( 0 , ∞ ) t=\ell^{-1}(s)=\ln s,s\in(0,\infty) t=ℓ−1(s)=lns,s∈(0,∞).
最终的弧长参数化曲线为:
c ~ ( s ) = c ∘ ℓ − 1 ( s ) = ( cos s , sin s ) . \tilde{c}(s)=c \circ \ell^{-1}(s)=(\cos s, \sin s). c~(s)=c∘ℓ−1(s)=(coss,sins).
这也印证了我们的想法。
Example 2.3.2 c : [ π 2 , 3 π 2 ] → R 2 c:[\frac{\pi}{2},\frac{3\pi}{2}]\rightarrow \mathbb{R}^2 c:[2π,23π]→R2, given by c ( t ) = ( t − sin t , 1 − cos t ) c(t)=(t-\sin t,1-\cos t) c(t)=(t−sint,1−cost).
这里的曲线称为摆线(cycloid),且 θ \theta θ取的是其中间的一段:

Solution:
s = ℓ ( t ) = ∫ π 2 t ∣ c ′ ( τ ) ∣ d τ = ∫ π 2 t ( 1 − cos τ ) 2 − sin 2 τ d τ = ∫ π 2 t 2 sin τ 2 d τ s=\ell(t)=\int^t_{\frac{\pi}{2}}|c'(\tau)|d\tau=\int^t_{\frac{\pi}{2}}\sqrt{(1-\cos \tau)^2-\sin^2 \tau}d\tau=\int^t_{\frac{\pi}{2}}2\sin \frac{\tau}{2}d\tau s=ℓ(t)=∫2πt∣c′(τ)∣dτ=∫2πt(1−cosτ)2−sin2τdτ=∫2πt2sin2τdτ
⇒ s = − 4 cos t 2 + 2 2 , s ∈ [ 0 , 4 2 ] , \Rightarrow s=-4\cos \frac{t}{2} +2\sqrt{2}, s\in[0,4\sqrt{2}], ⇒s=−4cos2t+22,s∈[0,42],
因为在 t 2 ∈ [ π 4 , 3 π 4 ] \frac{t}{2}\in[\frac{\pi}{4},\frac{3\pi}{4}] 2t∈[4π,43π]上 cos \cos cos函数导数恒不为0,反函数存在,所以最终:
c ~ ( s ) = c ∘ ℓ − 1 ( s ) = ( t − sin t , 1 − cos t ) \tilde{c}(s)=c \circ \ell^{-1}(s)=(t-\sin t,1-\cos t) c~(s)=c∘ℓ−1(s)=(t−sint,1−cost)
⇒ c ~ ( s ) = ( 2 arccos 2 2 − s 4 − 2 2 − s 8 ( 2 2 + s ) 2 − 2 s 2 , 2 − 2 ( 2 2 − s 4 ) 2 ) . \Rightarrow \tilde{c}(s)=(2\arccos\frac{2\sqrt{2}-s}{4}-\frac{2\sqrt{2}-s}{8}\sqrt{(2\sqrt{2}+s)^2-2s^2}, 2-2(\frac{2\sqrt{2}-s}{4})^2). ⇒c~(s)=(2arccos422−s−822−s(22+s)2−2s2,2−2(422−s)2).
我要知道结果会是这样,一开始我就不愿意求了。所以接下来的问题是有没有对一般非弧长参数适用的公式呢,这个问题将会在第四次笔记中讲到。
至此,曲线的参数化就讲完了,下一篇就初入微分几何的正题——Frenet标架。
参考:
[1]W. Klingenberg. A course in differential geometry. Translated from the German by David Hoffman. Graduate Texts in Mathematics, Vol. 51. Springer-Verlag, 1978.
[2]J. Shurman. Calculus and Analysis in Euclidean Space Undergraduate Texts in Mathematics,Springer-Verlag, 2016.
[3]厦门大学杨波老师的主页:http://math-faculty.xmu.edu.cn/display.aspx?tid=149