机器学习(3) K近邻算法(KNN)介绍及C++实现
目录
- 前言
- K近邻算法
- KD树
-
- 生成KD树
- 通过KD树查询最近邻节点
- 通过KD树查询K近邻节点
- K近邻算法三大要素
前言
此前已发布的两篇博客,分别记录在假设空间有限、样本空间有限条件下如何计算泛化误差上界,并给出C++代码实现,详情参见机器学习(1)泛化误差上界的实现及分析;以及在线性可分条件下,采用随机梯度下降法收敛分二分类超平面的感知机算法,并给出C++代码实现,详情参见机器学习(2) 感知机原理及实现。
感知机是基础的分类学习方法, 对于线性不可分模型、多类别分类问题束手无策。本篇博文带来一种基于实例的多分类机器学习算法,K近邻算法,K-Nearest-Neighbour(KNN)。带来K近邻算法的详细解释,讲解KD树构建过程,掌握如何实现基于KD树的最近邻查询、K近邻查询,以及如何使用K近邻查询进行投票选择生成查询样本的预测类别,并附上本文的C++代码实现。与此前的文章不同,此前文章一般等到全文讲解结束之后再附上完整代码,而本文KD树的实现和理解需要加上代码一起理解,所以在文中穿插了部分实现代码。完整代码参见我的Github:Github-zhangwenniu-KNN。
K近邻算法
在最初接触K近邻算法之前,可能会将其与另一种无监督机器学习算法——K均值聚类算法混淆,K均值聚类算法是多个初始样本点在没有预标记样本类别的情况下,根据样本间距离的最近相邻策略,无监督的学习并将所有样本分类收敛至K个不同类别。
与之进行区别的,K近邻算法是在预标记样本类别后,预测样本被输入进已标记的样本空间,根据其最近的K个不同的样本点的类别,投票产生待预测样本的类别。K近邻算法在使用过程中不构建模型,只是简单的依据不同样本多个特征条件下的距离关系,查询样本中的最近距离。对于样本空间上具有显著距离区域区分的多类别而言,K近邻算法的分类效果很好。这是一种惰性的学习策略,他没有显式的学习过程,在查询某个样本之前,并不预处理数据,直到开始学习才会构建分类模型。
援引《数据挖掘十大算法》一书中对K近邻算法的描述:
KNN分类方法很容易理解和实现,并且它在许多情况下都表现非常良好。根据Cover和Hart的研究显示1,在一定的情况下,最近邻规则的分类错误比率最多不会超过最优贝叶斯错误率的两倍,更进一步,一般情况下kNN方法的错误率都会渐进收敛到贝叶斯错误率,所以可以将kNN方法用于做贝叶斯的近似。
K近邻分类算法可以在一定程度上替代贝叶斯算法,这一点我可能会在后续的贝叶斯分类算法分析的过程中体现。K近邻算法的思想很容易理解:给定N个被标记的样本数据、给定K作为K个用于选取最近K个相邻的样本个数、给定度量两样本之间距离的度量方法、给定类别选择的投票规则、给定待预测分类的样本,在N个样本中找到与待查询样本最近相邻的K个样本点,通过投票选择的方法,生成目标类别即可。下面给出K近邻算法的形式化语言描述。
输入:训练样本集: X = { X 1 , X 2 , . . . , X N } , Y = { Y 1 , Y 2 , . . . , Y N } , k X=\{X_1,X_2,...,X_N\}, Y=\{Y_1,Y_2,...,Y_N\}, k X={X1,X2,...,XN},Y={Y1,Y2,...,YN},k。
其中 X i = ( X i ( 1 ) , X i ( 2 ) , . . . , X i ( n ) ) ∈ R n , Y i ∈ R = { c 1 , c 2 , . . . , c n } , X X_i=(X_i^{(1)},X_i^{(2)},...,X_i^{(n)})\in \R^n,Y_i\in \R=\{c_1,c_2,...,c_n\},X Xi=(Xi(1),Xi(2),...,Xi(n))∈Rn,Yi∈R={c1,c2,...,cn},X为样本点, Y Y Y为分类的标签, k k k是用于度量最近特征的范围量, n n n是所有样本不同类别的集合。
输出:实例 x x x所属的类别 y y y。同样也可以附带输出距离最近的k个点。
1. 根据距离度量方法,找到实例 x x x的 k k k个最近相邻的样本点,记为 N k ( x ) N_k(x) Nk(x)。
2. 使用投票表决规则,选择k个最近相邻样本点中出现次数最多的样本作为预测样本的类别 y y y。即
y = a r g max c j ∑ x i ∈ N k ( x ) I ( y i = c j ) , i = 1 , 2 , . . . , N ; j = 1 , 2 , . . . , n . (1) y=arg\max\limits_{c_j}\sum\limits_{x_i\in N_k(x)}I(y_i=c_j),i=1,2,...,N;j=1,2,...,n.\tag{1} y=argcjmaxxi∈Nk(x)∑I(yi=cj),i=1,2,...,N;j=1,2,...,n.(1)
这种方式理解起来最为直观,以K=1进行最近邻分类为例,只需要每次查询的时候逐个比较N个数据与待查询实例向量之间的关系,记录一个最近的节点即可。样本量为一万的时候,每个查询需要比较一万次用于分类,下面介绍一种K近邻算法的二叉查找树KD树方式,可以将每次最近邻查找的比较次数降低到 O ( log n ) O(\log_n) O(logn),即一万个样本量查询次数约为14次,大大降低了运算的时间复杂度。
KD树
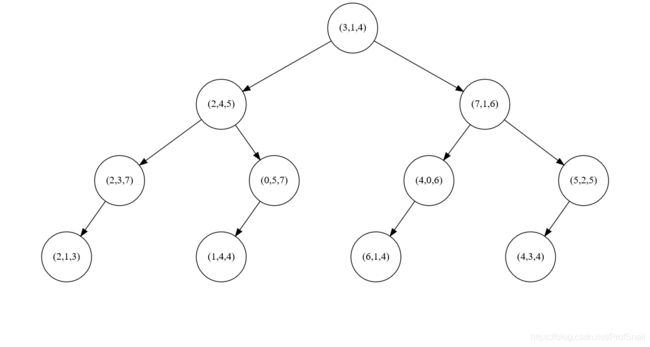
KD树(K-Dimension Tree)是一种对于多维数据进行二叉查找的树形结构。不同于前文中K近邻算法中的K表示最近相邻的K个实例向量,KD树中的K表示数据的维度是K,例如下图中的KD树是3-Dimension-Tree,三维数据查找树;另一个则是2-Dimension-Tree二维数据查找树。关于绘制平衡查找树的图像以及如何对齐,我另外写了一篇博客,参见Python数据分析(02) graphviz绘制KD二叉查找树。

生成KD树
KD树有多种实现方式,一些方式使用方差最大的维度作为每一层查找时候的数据维度,以保证分类的维度上样本数据分布最为分散。本文与李航《统计学习方法》中介绍的方法保持一致。生成KD树的方法给出如下递归化表述:
1. 维度从 { 1 , 2 , 3 , . . . , k } \{1,2,3,...,k\} {1,2,3,...,k}逐个选取,记当前选择的维度为 k i k_i ki,并将样本组在该维度 k i k_i ki下的中位数所在样本作为目前根节点,记为 r o o t root root。
2. 将所有第 k i k_i ki维中位数左侧的数据分为一组,用于生成 r o o t root root的左子树,左子树选择的维度为 ( k i + 1 ) m o d k (k_i+1)\mod k (ki+1)modk。
3. 将所有第 k i k_i ki维中位数右侧的数据分为一组,用于生成 r o o t root root的右子树,右子树选择的维度为 ( k i + 1 ) m o d k (k_i+1)\mod k (ki+1)modk。
4. 当样本组为空的时候,当前节点记为空节点,返回上一层。
经过这4个步骤,就可以建立一棵完整的KD树。观察上图中的三维查找树,根节点左侧的所有节点都小于等于(3,1,4)的第一维数据3,右侧的所有节点都大于等于(3,1,4)的第一维数据3;同理,第二层节点的左子树的第二维数据都小于等于该节点的第二维数据,右子树的第二维数据都大于等于该节点的第二维数据。C++实现代码如下:
// KD树中的节点
struct node {
int index;
int depth;
node* left, *right, *father;
node() {
index = depth = -1;
left = right = father = NULL;
}
};
// 生成KD树
node* createKDTree(vector<int>& index, int depth) {
if (index.empty()) {
return NULL;
}
node* root = new node();
root->depth = depth;
int dim = depth % n;
vector<pair<double, int> > vt;
// 根据数值和索引生成数组,用于选择标准的中位数。
for (auto id : index) {
vt.push_back(pair<double, int>(data[id][dim], id));
}
sort(vt.begin(), vt.end());
int num = vt.size();
// 无论奇偶,设置中位数的节点为第n/2个。
root->index = vt[num / 2].second;
vector<int> left;
for (int i = 0; i < num / 2; i++) {
left.push_back(vt[i].second);
}
vector<int> right;
for (int i = num / 2 +1; i < num; i++) {
right.push_back(vt[i].second);
}
// 递归生成左右KD树。
root->left = createKDTree(left, depth + 1);
root->right = createKDTree(right, depth + 1);
// 为了回溯寻找最近点,需要保存父节点。
if (root->left)root->left->father = root;
if (root->right)root->right->father = root;
return root;
}
树形结构一般需要另外的插入和删除操作。但是无论插入或者删除操作,都需要重新计算各个维度上的中位数,很可能导致原有结构被直接破坏,需要重新构建一棵完整的KD树。除了重新构建完整KD树之外,也有采取替罪羊树方法维护KD树的插入和删除操作,具体方法是插入操作、删除操作的节点虽然破坏了树的结构,但是暂时不重新建树,而是设置一个重建阈值,当树的待删除节点数量超过了阈值比例,则重建该子树。由于插入和删除操作过于繁琐,并且在训练之前一般已经标记好了数组内容,构建KD树已经足够满足训练所需。关于KD树的更详细介绍参见KD树算法分析。
以上文中的二维二叉树的图形为例,我们在二维平面上感受一下这张KD树的图形。

可以看到,这六个点将平面分为了七个不同的子区域,这是由二叉树的性质决定的。n个数据形成n个非叶子节点,出度为2n,除了根节点之外的n-1个节点占据n-1个出度,剩余出度数量为2n-(n-1)=n+1。这意味着任何一个数据在查询过程中,一定可以根据区分的维度,最后找到一个包含该数据的最小子区域,且该子区域包含于n+1的区域之中,是KD树中叶子结点的一个左右空节点之一。
通过KD树查询最近邻节点
KD树的本质是按照不同的维度,根据数据的中位数划分出垂直于该维度的超平面,将数据分为左右两侧。算法描述如下:
- 首先初始选择一个节点作为最近相邻节点。 这个节点是根据KD树查询数据 x x x找到的叶节点,对于每一层节点node而言,其数据记为node.data,并且该节点作为分类超平面时,是维度node.dim下的中位数。如果 x [ d i m ] ≤ n o d e . d a t a [ d i m ] x_{[dim]}\le node.data_{[dim]} x[dim]≤node.data[dim]则向当前节点的左子树继续查询;否则像当前节点的右子树继续查询,直到查询到叶子节点为止。该节点是包含 x x x的最小子区域。
- 在第一步的过程中,记录从根节点到叶子结点的路径,放入路径栈中。
- 记第一步查询到的叶子节点为 l e a f leaf leaf,暂定 l e a f leaf leaf为距离 x x x最近的节点,后续再更新该距离。 m i n D i s minDis minDis赋值为 l e a f leaf leaf与待分类数据 x x x之间的距离, n e a r e s t N o d e nearestNode nearestNode赋值为 l e a f leaf leaf。注意,该节点只是一个初始化的方法,实际上任何一个节点都可能比该叶子节点距离 x x x更近,这里只是将最近距离初始到包含 x x x的最小区域节点处。
- 当路径栈不为空的时候,取出栈顶元素,记为 t o p top top。由于路径上的每个元素都有可能距离 x x x更近,比较 t o p top top和 x x x的距离是否比之前的 m i n D i s minDis minDis更近,如果更近则更新最近距离和最近节点。
- 继续判断以 x x x为中心,以 m i n D i s minDis minDis构成的多维球体是否与 t o p top top的两个子区域相交,如果相交,则更近的节点可能出现在该区域中,当该区域未曾访问过时,就将相交区域的节点送入路径栈中。注意,由于我们初始化位置是叶子节点,并且递归返回根节点,要判断是否刚刚从某个子区域搜寻回到父节点,父节点又发现这个回来的子区域和x的超圆相交,防止重复访问同一个子区域。
- 重复4,5两个步骤,直到堆栈为空。因为不会重复访问同一棵子树,所以在有限样本的情况下一定会在有限步骤内终止。
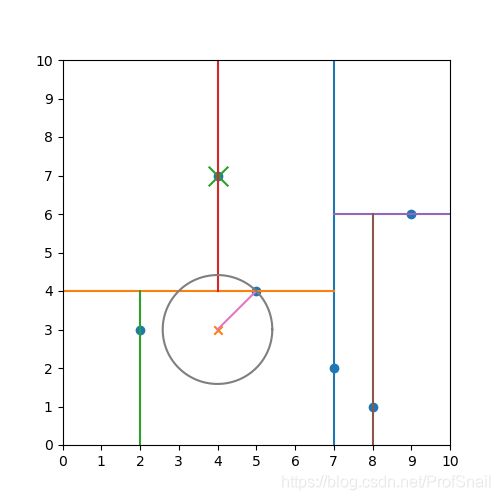
初学者会在判断超圆与超平面相交的地方犯迷糊:什么是超圆?什么是圆和平面相交?为什么不相交就一定不会出现在该子区域?为什么相交了还只是有可能出现,而不是一定出现?如何判定超圆与平面相交?这其实就是我在学习过程中出现的问题,下面我们通过一个实例演示来理解这个过程。假设当前空间仍然是上文中提到的二维KD树下的数据X=[(2,3), (4,7), (5,4), (7,2), (8,1), (9,6)],待查找数据为(4,3)。
-
根据(4,3)查询叶节点。找到包含(4,3)的区域为(2,3)的右半区,记(2,3)为当前暂定的最近相邻节点,超圆情况如下。可以看到,当前以x为圆心,以最近距离为半径画的圆内包括了另一个点(5,4),而(5,4)才是真正的最近相邻点。另外的区域(8,1),(9,6)已经在当前最短半径的圆形以外,不可能距离更近,所以不用搜寻(7,2)的右半侧点。

-
初始搜寻叶节点过程中的路径放入堆栈中,目前的堆栈内点为[(7,2), (5,4), (2,3)]。弹出(2,3)后,由于(2,3)的左右两侧不再具有子节点,不用继续搜索(2,3)的左右节点。
-
栈内点为[(7,2), (5,4)]继续弹出(5,4)节点,比较发现(5,4)距离待查询点(4,3)距离更近,所以将最近点更新至(5,4)。(5,4)作为分类点时维度为第二维,发现该圆形与(5,4)的上面区域相交,最近点可能在上半区域,于是将上侧节点(4,7)压入栈中。

-
栈内节点为[(7,2), (4,7)],弹出栈顶元素(4,7),比较发现该点距离待查询节点距离不会更短,因此不更新最近节点。且(4,7)已经是叶子节点,不再继续查找其子区域。
-
栈中元素为[(7,2)],弹出栈顶元素(7,2)。发现该节点不比当前最近节点更近,不更新最近节点。且发现超圆与超平面不相交,因此也不查询另一半子区域。至此,查询结束,最近点为(5,4),最近距离为 2 \sqrt2 2。

至此,最近相邻算法已经表述完毕,只有当超圆与分类超平面相交时,才需要查询其另一半子区域,查询的平均时间复杂度为 O ( l o g n ) O(logn) O(logn)。下面给出C++代码实现。
int NearestSearch(vector<double> x) {
// 根据某个节点,寻找最近相邻点。
if (x.size() != n) {
printf("Input data error. Dimension not match.\n");
exit(5);
}
// 根据维度与中位数的大小关系,选择最底层叶节点为初始最近节点。
stack<node*> st;
// 在寻找叶节点的过程中,添加进来路径。
node* nearest = findLeaf(x, head, st);
Distance d = Distance(2);
// 以叶节点作为当前最近节点。
double minD = d.Minkowski(x, data[nearest->index]);
node* minNode = nearest;
// 使用布尔数组进行打表,防止重复访问同一个节点分支。
vector<bool> vis(data.size(), 0);
while (!st.empty()) {
// 回溯路径。
node* top = st.top();
vis[top->index] = 1;
// 输出当前访问节点。
/*
cout << top->index << " " << top->depth << " Data: ";
for (auto dt : data[top->index])cout << dt << " ";
cout << endl;
*/
st.pop();
// 计算当前节点是否更优,如果距离目标节点更近,则更新最近节点索引以及最近距离。
double tempD = d.Minkowski(x, data[top->index]);
if (tempD < minD) {
minD = tempD;
minNode = top;
}
// 输出更新之后的最近距离。
/*
cout << minD << endl;
*/
// 比较当前节点所在的维度下,由目标节点与最短半径构成的超圆能否与其子节点相交。
int dim = top->depth % n;
// 能够与左子树相交,就说明目标节点在该维度下向左偏移后的最大值(偏移长度为半径),小于当前节点在当前分割维度的数值。
// 能够与右子树相交,就说明目标节点在该维度下向右偏移后的最大值(偏移长度为半径),大于当前节点在当前分割维度的数值。
int left = x[dim] - minD, right = x[dim] + minD;
// 同时保证节点不为空、未访问过,才将节点放入路径栈中进行检索。
if (left <= data[top->index][dim] && top->left && !vis[top->left->index]) {
st.push(top->left);
}
if (right >= data[top->index][dim] && top->right && !vis[top->right->index]) {
st.push(top->right);
}
}
// 输出最短距离以及其对应的节点。
printf("minD = %lf. \n", minD);
printf("minNode index is %d, depth is %d, data is: ", minNode->index, minNode->depth);
for (int i = 0; i < n; i++) {
printf("%0.lf ", data[minNode->index][i]);
}
printf("\n");
// 返回最近节点对应的下标。
return minNode->index;
}
通过KD树查询K近邻节点
经过上面的演示,可以得到查询KD树中K个最近相邻节点的步骤。在这里,我们需要维护一个大根堆,堆内元素维持为最近相邻的K个元素,堆顶元素是K个最近相邻的元素中距离最远的一个点,任何一个更近的节点,一定比第K远的距离更近,所以每次更新时候只需要比较与堆顶元素之间的距离即可,如果更近则将堆顶弹出,将新节点放入堆中。算法描述如下,我直接复用了上面最近相邻节点算法的描述过程,并增减了部分内容以贴合最近K相邻算法:
- 首先初始化一个大根堆,将一个无穷大的距离的空节点放入堆中,这样任何一个点都会比当前无穷大距离更近,方便维护。在C++中,大根堆用优先队列加以维护。
- 初始选择一个节点作为最近相邻节点。 这个节点是根据KD树查询数据 x x x找到的叶节点,对于每一层节点node而言,其数据记为node.data,并且该节点作为分类超平面时,是维度node.dim下的中位数。如果 x [ d i m ] ≤ n o d e . d a t a [ d i m ] x_{[dim]}\le node.data_{[dim]} x[dim]≤node.data[dim]则向当前节点的左子树继续查询;否则像当前节点的右子树继续查询,直到查询到叶子节点为止。该节点是包含 x x x的最小子区域。
- 在第一步的过程中,记录从根节点到叶子结点的路径,放入路径栈中。
- m i n K D i s minKDis minKDis赋值为无穷大,表示距离 x x x最近K个节点中距离最大的点。注意,该节点只是一个初始化的方法,实际上任何一个节点都可能比 m i n K D i s minKDis minKDis距离 x x x更近,这里只是将最近距离初始到包含 x x x的最大无穷区域处。
- 当路径栈不为空的时候,取出栈顶元素,记为 t o p top top。如果堆中的数量小于K个,则将这个节点认为是距离 x x x最近的K个节点之一,将其放入堆中。如果堆中数量已经满足K个,由于路径上的每个元素都有可能距离 x x x更近,比较 t o p top top和 x x x的距离是否比之前的 m i n K D i s minKDis minKDis更近,如果更近则更新最近距离和最近节点。
- 继续判断以 x x x为中心,以 m i n K D i s minKDis minKDis构成的多维球体是否与 t o p top top的两个子区域相交,如果相交,则更近的节点可能出现在该区域中,当该区域未曾访问过时,就将相交区域的节点送入路径栈中。注意,由于我们初始化位置是叶子节点,并且递归返回根节点,要判断是否刚刚从某个子区域搜寻回到父节点,父节点又发现这个回来的子区域和x的超圆相交,防止重复访问同一个子区域。
- 重复5,6两个步骤,直到堆栈为空。因为不会重复访问同一棵子树,所以在有限样本的情况下一定会在有限步骤内终止。
不难发现,只有在维护大根堆方面和K个最近相邻节点的关系上,算法与此前最近相邻算法存在差异,其余地方大体类似,大家可以将查询(4,3)节点的3个最近相邻节点的过程手动模拟,以体会算法的流程和含义。找到K个相邻节点之后,只需要进行投票即可。有文献采用的方法是距离更近的节点所投票的比例应该更高,只需要简单的在投票环节增加一个比重即可。为便于读者理解,这里每个近邻节点投票的权重相同,且都为1。下面给出K近邻算法的C++实现。
// 进行K近邻搜索的过程中,保存在优先队列中的节点。
struct knode {
// KD树中的节点索引。
int index;
// 当前节点与目标检索数据的距离。
double distance;
// 用优先队列保证大根堆的堆顶元素是距离最大值。
// 当队列内元素数量小于K的时候,向堆中添加元素。
// 当队列元素大于K的时候,比较当前节点的距离是否比K个最小距离还要小,如果是的话则将其取代为顶点的位置。
knode() {}
knode(int _id, double _d) :index(_id), distance(_d) {}
bool operator < (const knode& nd) const {
return distance < nd.distance;
}
};
vector<int> knSearch(vector<double> x, int k) {
// 根据某个节点,寻找最近相邻点。
if (x.size() != n) {
printf("Input data error. Dimension not match.\n");
exit(5);
}
if (k > data.size()) {
printf("You're searching %d nearest data, while there is only %d data. \n", k, n);
printf("Adjusted k to %d. \n", n);
k = n;
}
// 根据维度与中位数的大小关系,选择最底层叶节点为初始最近节点。
stack<node*> st;
// 在寻找叶节点的过程中,添加进来路径。
node* nearest = findLeaf(x, head, st);
Distance d = Distance(2);
// 以叶节点作为当前最近节点,逐层向上寻找K个最近相邻的节点。
// 设置一个最大距离为无穷大,则K个最近相邻的节点一定在距离查找节点的无穷大球范围内。
double maxMinKD = 1e8;
// 使用布尔数组进行打表,防止重复访问同一个节点分支。
vector<bool> vis(data.size(), 0);
// 设置一个与待查询节点之间距离的大根堆,保证K个节点都要小于等于大根堆的堆顶距离。
priority_queue<knode> q;
q.emplace(knode(-1, maxMinKD));
while (!st.empty()) {
// 回溯路径。
node* top = st.top();
vis[top->index] = 1;
// 输出当前访问节点。
/*
cout << top->index << " " << top->depth << " Data: ";
for (auto dt : data[top->index])cout << dt << " ";
cout << endl;
*/
st.pop();
// 计算当前节点是否更优,如果是距离目标节点最近的K个范围之内,则更新索引队列。
double tempD = d.Minkowski(x, data[top->index]);
if (q.size() < k) {
q.emplace(knode(top->index, tempD));
}
else {
if (tempD <= q.top().distance) {
q.pop();
q.emplace(knode(top->index, tempD));
}
}
maxMinKD = q.top().distance;
// 输出更新之后的K最近距离。
/*
cout << maxMinKD << endl;
*/
// 比较当前节点所在的维度下,由目标节点与最短半径构成的超圆能否与其子节点相交。
int dim = top->depth % n;
// 能够与左子树相交,就说明目标节点在该维度下向左偏移后的最大值(偏移长度为半径),小于当前节点在当前分割维度的数值。
// 能够与右子树相交,就说明目标节点在该维度下向右偏移后的最大值(偏移长度为半径),大于当前节点在当前分割维度的数值。
int left = x[dim] - maxMinKD, right = x[dim] + maxMinKD;
// 同时保证节点不为空、未访问过,才将节点放入路径栈中进行检索。
if (left <= data[top->index][dim] && top->left && !vis[top->left->index]) {
st.push(top->left);
}
if (right >= data[top->index][dim] && top->right && !vis[top->right->index]) {
st.push(top->right);
}
}
// 输出最短距离以及其对应的节点。
vector<int> ans;
printf("maxMinKD = %lf. \n", maxMinKD);
while (!q.empty()) {
int idx = q.top().index;
double dis = q.top().distance;
ans.push_back(idx);
q.pop();
printf("Each node index is %d, distance is %lf. data is: ", idx, dis);
for (int i = 0; i < n; i++) {
printf("%0.lf ", data[idx][i]);
}
printf("\n");
}
// 返回K个最近节点对应的下标数组。
return ans;
}
int vote(vector<double> x, int k) {
// 获取K近邻节点的下标。
vector<int> kNearest = knSearch(x, k);
// 投票获取根据K近邻节点得到的类别值。
unordered_map<int, int> mp;
for (int& id : kNearest) {
mp[label[id]]++;
}
int maxCount = 0, maxLabel = -1;
// 投票
for (auto it : mp) {
if (it.second > maxCount) {
maxCount = it.second;
maxLabel = it.first;
}
}
// 输出数据及其被投票得到的结果。
printf("Data: ");
for (int i = 0; i < x.size(); i++) {
printf("%.0lf ", x[i]);
}
printf("is labeled as %d, poll num is %d.", maxLabel, maxCount);
return maxLabel;
}
至此,K近邻算法已经基本实现完成。
K近邻算法三大要素
K近邻算法有三大要素:距离标准、K值确定、投票方法。距离度量标准有明可夫斯基距离(Minkowski Distance),对于n维向量 x 1 , x 2 x_1,x_2 x1,x2而言,距离表示为:
M i n k o w s k i D i s t a n c e ( x 1 , x 2 , p ) = ( ∑ i = 1 n ∣ x 1 ( i ) − x 2 ( i ) ∣ p ) 1 p (2) MinkowskiDistance(x_1,x_2,p)=(\sum\limits_{i=1}^{n}|x_1^{(i)}-x_2^{(i)}|^p)^{^{\frac{1}{p}}}\tag{2} MinkowskiDistance(x1,x2,p)=(i=1∑n∣x1(i)−x2(i)∣p)p1(2)
当 p = 1 p=1 p=1时,明可夫斯基距离退化为曼哈顿距离(Manhattan Distance)。
L 1 ( x 1 , x 2 ) = ( ∑ i = 1 n ∣ x 1 ( i ) − x 2 ( i ) ∣ ) (3) L_1(x_1,x_2)=(\sum\limits_{i=1}^{n}|x_1^{(i)}-x_2^{(i)}|)\tag{3} L1(x1,x2)=(i=1∑n∣x1(i)−x2(i)∣)(3)
当 p = 2 p=2 p=2时,明可夫斯基距离化为欧氏距离(Euclidean Distance)。
L 2 ( x 1 , x 2 ) = ( ∑ i = 1 n ∣ x 1 ( i ) − x 2 ( i ) ∣ 2 ) 1 2 (4) L_2(x_1,x_2)=(\sum\limits_{i=1}^{n}|x_1^{(i)}-x_2^{(i)}|^2)^{^{^\frac{1}{2}}}\tag{4} L2(x1,x2)=(i=1∑n∣x1(i)−x2(i)∣2)21(4)
当 p = + ∞ p=+\infty p=+∞时,明可夫斯基距离化为两个向量所有维度中坐标距离的最大值。
L ∞ ( x 1 , x 2 ) = max i = 1 n ∣ x 1 ( i ) − x 2 ( i ) ∣ (5) L_\infty(x_1,x_2)=\max\limits_{i=1}^{n}|x_1^{(i)}-x_2^{(i)}|\tag{5} L∞(x1,x2)=i=1maxn∣x1(i)−x2(i)∣(5)
设计一个距离类以计算两点之间的距离。
class Distance {
public:
int k;
Distance(int _k):k(_k) {}
double Minkowski(vector<double> x, vector<double> y) {
int n = x.size();
if (x.size() != y.size()) {
printf("Error Message: in Distance.Minkowski(). \n");
printf("x.size() = %d, y.size() = %d. They are guaranteed to be same. ", x.size(), y.size());
exit(-1);
}
double dis = 0;
if (k == INF) {
// k趋于无穷的时候,就应该是所有坐标距离的最大值。
for (int i = 0; i < n; i++) {
dis = max(dis, abs(x[i] - y[i]));
}
}
else {
for (int i = 0; i < n; i++) {
dis += pow(fabs(x[i] - y[i]), k);
}
dis = powf(dis, 1.0 / k);
}
return dis;
}
};
至于k值的确定,一般在工程中采用多折交叉验证的方式,将原始数据分为训练集、验证集、测试集。根据比对选择最适合的k数值。一定情况下,最近邻算法甚至优于K近邻算法。
投票方法,也就是分类决策规则,在上文中已经提到过,不再赘述。
至此,已经将K近邻算法讲述完毕。上文中的代码块被封装在类KNN中,完整代码已经更新在我的GitHub仓库:Zhangwenniu-Statistic-Learning-Method中,经过测试可以完整使用,只需要编译knn.cpp文件,将需要的数据按要求放入data.txt文本中即可实现KNN算法的模拟,并支持绘制KD二叉树,同时我也会继续更新《机器学习方法》的C++实现,并维护在我的GitHub仓库中。欢迎大家共同学习。
一篇文章又写了一个礼拜,深感写作的不易啊。继续向李航老师致敬。欢迎大家留言讨论,一键三连那!
本文参考文献:
李航《统计学习方法》
Xindong Wu, Vipin Kumar《数据挖掘十大算法》
T. Cover and P. Hart, Nearest neighbor pattern classification. IEEE Transactions on Information Theory, 13(1): 21-27, January 1967. ↩︎