《视觉 SLAM 十四讲》V2 ——第3讲
关于本笔记的说明: 最好跟着 原书 整理个人笔记,他人笔记仅适合参考部分内容。
文章目录
- 《视觉SLAM十四讲》V2 2019年
-
- 2.2 经典视觉 SLAM框架
-
-
-
- 运动方程和观测方程
-
- HelloSLAM
-
-
- 查看 ubuntu 版本 lsb_release -a
-
- cmake + make
-
-
- VS Code 自己下包安装,不要apt-get ,这样安装的Code无法使用中文输入
- 软件安装指令 sudo dpkg -i 安装包名
- 用cmake 生成库
-
-
- 编写头文件.h
-
-
-
- 第3讲 三维空间 刚体运动
-
-
-
- a^ 相当于 a叉乘
- !!坐标系 转换
- Code实践_ Eigen: 纯用头文件搭建的库
-
-
- 3.3 旋转向量 和 欧拉角
-
- 3.3.2 欧拉角 (一个旋转 分解成 3次 绕不同轴的旋转)
- 3.4 四元数(Quaternion)
-
- 四元数 表示旋转
- 3.4.4 四元数 到 其他旋转表示 的转换
-
- 四元数 ——> 旋转矩阵
- 四元数 ——> 旋转向量
- Code实践_ Eigen 几何模块
-
- Eigen 官方文档
- 3.7.1 运动轨迹 显示
-
- !!!一些文件的注释语法
- 习题
- 习题_第 3 讲 三维空间刚体运动
-
- √ 题1
- √ 题2
- √ 题3
- √ 题4
- √ 题5
- 题6
————————
B站链接
高翔博客链接
百度网盘链接:https://pan.baidu.com/s/1VsrueNrdqmzTvh-IlFBr9Q
提取码:vfhe
github源码链接V2
《视觉SLAM十四讲》V2 2019年

动态定位和环境建模
SLAM 同时定位与地图构建
SLAM Simultaneous Localization and Mapping 同时定位与地图构建
搭载特定传感器的主体,在没有环境先验信息的情况下,于运动中建立环境的模型,同时估计自己的运动。
SLAM系统: 视觉里程估计、后端优化、建图、回环检测。
通过一番努力,看到事情顺利进行。

机器人本体: 轮式编码器、相机、激光传感器、惯性传导单元(Inertial Measurement Unit, IMU)。
- 对环境无要求
环境中: 导轨、二维码标志
单目SLAM只能估计相对大小关系, 估计的轨迹和地图 与真实的轨迹和地图 相差一个因子 尺度。 但仅有单目无法确定这个Scale的值。
单目的缺点:
1、需要平移后才能 计算深度
2、无法确定真实尺度。
有了距离信息, 场景的三维结构就可以通过单个图像恢复,同时消除尺度不确定性。
人眼 通过 左右眼图像的差异 来 判断物体的远近。
双目 的不足: 计算量很大
1、配置与标定 复杂,深度量程和精度受双目的基线和分辨率所限。
2、视差的计算非常消耗计算资源。
深度相机: 物理测距 发射光并接收返回的光,测出物体与相机之间的距离。
![]()
RGB-D不足: 主要用于室内
1、测量范围窄
2、噪声大
3、视野小
4、易受日光干扰
5、无法测量投射材质等
2.2 经典视觉 SLAM框架
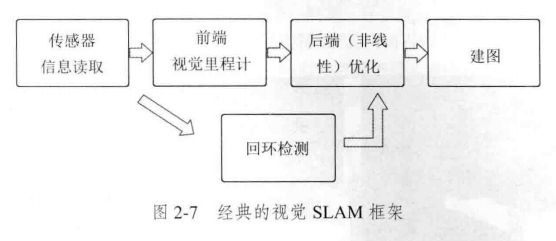
视觉里程计: 通过相邻帧的图像估计相机运动,并恢复场景的空间结构
里程计: 只计算相邻时刻的运动,与过去的信息没有关联。
已可实现:
1、一个视觉里程计, 估计两张图像间的相机运动
2、把相邻时刻的运动“串”起来 ——>获得 机器人的运动轨迹——> 实现 定位
3、根据每个时刻的相机位置,计算各像素对应的空间点的位置 ——> 地图
新的问题:
累积漂移 ——> 地图不一致
解决办法:
1、回环检测: 检测 机器人 是否 回到原始位置
- 计算机视觉 图像的特征提取与匹配
2、后端优化: 根据 回环检测 的信息,校正 轨迹形状
- 处理 噪声
- 滤波与 非线性优化算法
SLAM本质: 对 运动主体自身 和 周围环境空间 不确定性 的估计。
回环检测: 判断图像的相似性,让机器人确定自己回到了 之前经过的地方。 填补 漂移值
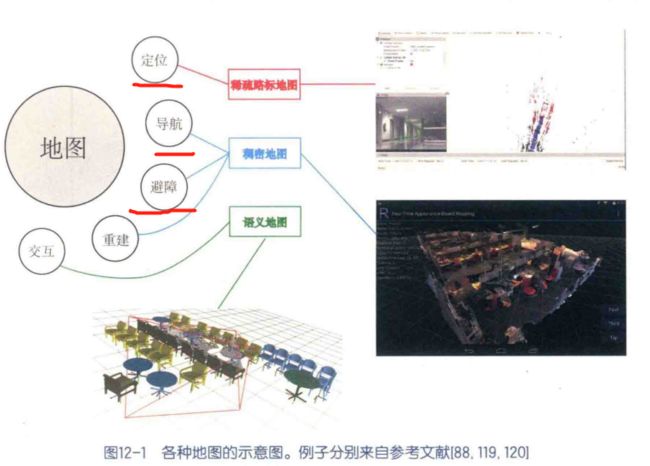
度量地图(Metric Map):
精确地表示 地图中物体的位置关系
稀疏只选择一部分有代表意义的物体(路标 Landmark) 定位
稠密 导航 (A*、D*)
拓扑地图(Topological Map)
强调地图元素之间的关系 考虑结点间的连通性
位姿由两个位置和一个转角描述时的运动方程:
[ x 1 x 2 θ ] k = [ x 1 x 2 θ ] k − 1 + [ Δ x 1 Δ x 2 Δ θ ] k + w k \begin{bmatrix} x_1\\ x_2 \\ θ \end{bmatrix}_k = \begin{bmatrix} x_1\\ x_2 \\ θ \end{bmatrix}_{k-1} + \begin{bmatrix} Δx_1\\ Δx_2 \\ Δθ \end{bmatrix}_{k} + \bm{w_k} x1x2θ k= x1x2θ k−1+ Δx1Δx2Δθ k+wk
携带二维激光传感器 观测方程
能测到的量: 路标点与机器人之间的距离 r r r 和夹角 ϕ \phi ϕ
路标点
y i = [ y 1 y 2 ] j T \bm{y_i}= \begin{bmatrix} y_1\\ y_2 \end{bmatrix}_j^T yi=[y1y2]jT
位姿
x k = [ x 1 x 2 ] k T \bm{x_k}= \begin{bmatrix} x_1\\ x_2 \end{bmatrix}_k^T xk=[x1x2]kT
观测数据
z k , j = [ r k , j ϕ k , j ] T \bm{z_{k,j}}= \begin{bmatrix} r_{k, j}\\ \phi_{k, j} \end{bmatrix}^T zk,j=[rk,jϕk,j]T
观测方程:
[ r k , j ϕ k , j ] = [ ( y 1 , j − x 1 , k ) 2 + ( y 2 , j − x 2 , k ) 2 a r c t a n ( y 2 , j − x 2 , k y 1 , j − x 1 , k ) ] + v \begin{bmatrix} r_{k, j}\\ \phi_{k, j} \end{bmatrix}= \begin{bmatrix} \sqrt{(y_{1,j}-x_{1,k})^2 + (y_{2, j}-x_{2,k})^2}\\ arctan(\frac{y_{2, j} - x_{2, k}}{y_{1, j}-x_{1,k}}) \end{bmatrix} + \bm{v} [rk,jϕk,j]=[(y1,j−x1,k)2+(y2,j−x2,k)2arctan(y1,j−x1,ky2,j−x2,k)]+v
运动方程和观测方程
{ x k = f ( x k − 1 , u k , w k ) , k = 1 , . . . , K z k , j = h ( y j , x k , v k , j ) , ( k , j ) ∈ O \left\{ \begin{aligned} \bm{x_k} & = f(\bm{x_k-1}, \bm{u_k}, \bm{w_k}), k = 1, ..., K\\ \bm{z_{k,j}} & = h(\bm{y_j, \bm{x_k, \bm{v_{k,j}}}}), (k, j)∈ \mathcal{O} \end{aligned} \right. {xkzk,j=f(xk−1,uk,wk),k=1,...,K=h(yj,xk,vk,j),(k,j)∈O
最基本的SLAM问题:
已知运动测量的读数 u \bm{u} u、传感器的读数 z \bm{z} z
求解: 定位问题 估计 x \bm{x} x; 建图问题 y \bm{y} y
状态估计问题:通过带有噪声的测量数据,估计内部隐藏的状态变量。
HelloSLAM
查看 ubuntu 版本 lsb_release -a
lsb_release -a
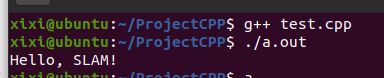
// helloSLAM.cpp
#include 在.cpp文件所在目录 打开命令行窗口,输入:
g++ helloSLAM.cpp
./a.out

g++ 默认将源文件编译成 名为a.out 的程序
cmake + make
ubuntu + 安装搜狗输入法【注意开始的中文选择,以及最后添加搜狗时去掉 仅显示系统语言的选择】
CMakeLists.txt: 告诉 cmake 要对这个目录下的文件做什么事情
# 声明要求的cmake 最低版本
cmake_minimum_required(VERSION 2.8) # 一般设为这个就行
# 声明一个 cmake 工程
project(HelloSLAM)
# 添加一个可执行程序 add_executable(程序名 源代码文件)
add_executable(helloSLAM helloSLAM.cpp)
在 CMakeLists.txt 所在 目录打开命令行窗口【Alt + Ctrl + T】
mkdir build
cd build
cmake..
make
./helloSLAM
执行cmake: 处理了工程文件之间的关系
执行make: 调用了 g++ 来编译程序
新建一个 中间文件夹 build 来 存放中间文件。
- 发布源代码时, 将build文件夹删掉即可
VS Code 自己下包安装,不要apt-get ,这样安装的Code无法使用中文输入
- 运行代码 前 记得 保存下代码


软件安装指令 sudo dpkg -i 安装包名
在安装包所在路径打开 命令行窗口
sudo dpkg -i 安装包名
用cmake 生成库
libHelloSLAM.cpp
//这是一个库文件
#include CMakeLists.txt 里增加这行
# 建库
add_library(hello libHelloSLAM.cpp) ## 静态库
#add_library(hello_shared SHARED libHelloSLAM.cpp) ## 共享库 节省空间
静态库:.a 每次调用都会生成一个副本
共享库:.so 只有一个副本 更省空间

cmake .. 空格不能少
编写头文件.h
libHelloSLAM.h
#ifndef LIBHELLOSLAM_H_
#define LIBHELLOSLAM_H_
// 上面的宏定义是为了防止重复引用这个头文件而引起的重定义错误
void printHello(); // 打印一句 Hello 的函数
#endif
函数调用 示例:
useHello.cpp
#include "libHelloSLAM.h"
// 使用 libHelloSLAM.h 中的 printHello() 函数
int main( int argc, char** argv )
{
printHello();
return 0;
}
CMakeLists.txt 增加 链接 指令:
# 声明要求的cmake 最低版本
cmake_minimum_required(VERSION 2.8) # 一般设为这个就行
# 声明一个 cmake 工程
project(HelloSLAM)
# 添加一个可执行程序 add_executable(程序名 源代码文件)
add_executable(helloSLAM helloSLAM.cpp)
# 建库
add_library(hello_shared SHARED libHelloSLAM.cpp) ## 生成 共享库
############ 增加 链接 指令
add_executable (useHello useHello.cpp)
target_link_libraries(useHello hello_shared) ## 这里用的共享库
cd build
cmake ..
make
./helloSLAM

第3讲 三维空间 刚体运动
旋转 + 平移
基: 张成 这个空间 的一组线性无关的量
内积: 点乘 向量间 的投影关系
外积: 叉乘 两个向量张成的四边形的面积。
a^ 相当于 a叉乘
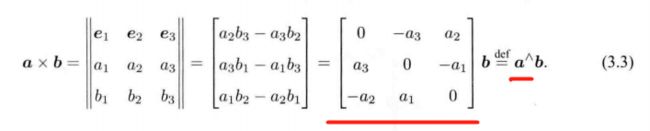
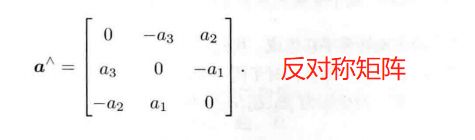
反对称矩阵 (Skew-symmetric Matrix): 为了实现 叉乘 转 点乘的转换
刚体运动: 两个坐标系之间的运动由一个旋转加上 一个平移组成。



!!坐标系 转换
向量 a \bm{a} a 在坐标系1为 a 1 \bm{a_1} a1 , 在坐标系2 为 a 2 \bm{a_2} a2
a 1 = R 12 a 2 + t 12 \bm{a_1 = R_{12}a_2 + t_{12}} a1=R12a2+t12
R 12 \bm{R_{12}} R12 : 把坐标系2 的向量 变换到 坐标系1中【坐标系2中 坐标相对于 坐标系 1】
t 12 \bm{t_{12}} t12 : 坐标系1原点 指向 坐标系2原点 的向量。
我的坐标: 从世界坐标系 指向自己坐标系原点的向量
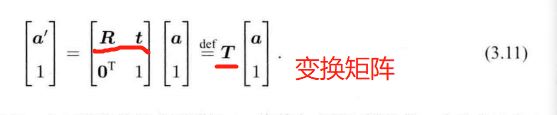
T 12 \bm{T_{12}} T12: 2 相对于 1 的变换
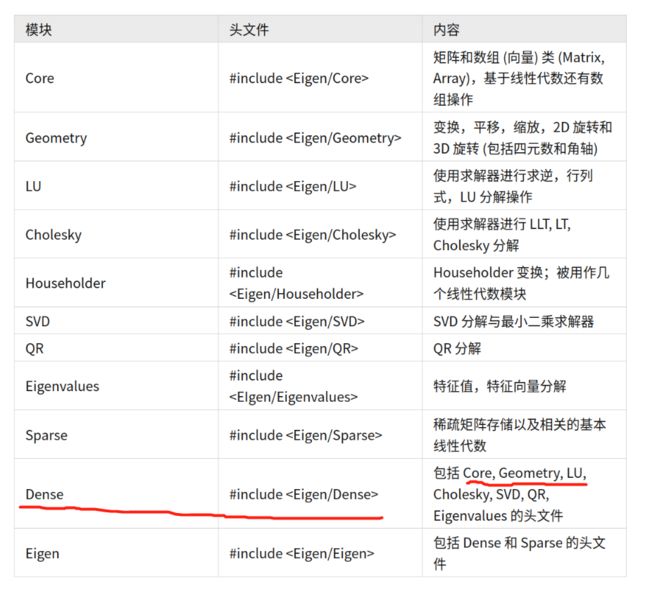
Code实践_ Eigen: 纯用头文件搭建的库
初始化:
#include
#include
#include

#include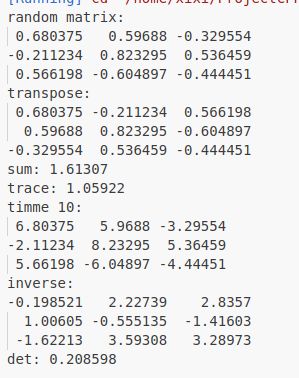
#include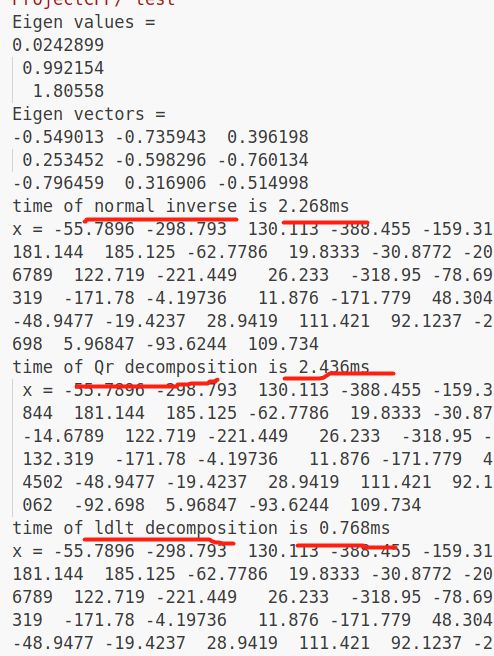


3.3 旋转向量 和 欧拉角
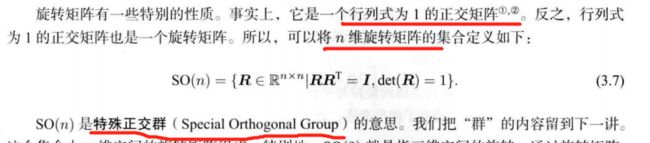
旋转矩阵表示 的不足:
1、冗余
- 旋转矩阵:9个量 表示 3个自由度,
- 变换矩阵: 16个量 表达 6个自由度
2、需要满足约束条件:必须是正交矩阵,且行列式为1
旋转向量(Axis-Angle): 方向与旋转轴一致,长度等于旋转角
表示旋转的 2 种方式:
方式1: 旋转矩阵 R \bm{R} R
方式2: 向量 θ n \theta\bm{n} θn, 旋转轴为一个单位长度的向量 n \bm{n} n, 角度为 θ \theta θ
两者之间的转换关系:
1、 θ n \theta\bm{n} θn ——> R \bm{R} R
- 通过罗德里格斯公式(Rodrigues’s Formula)推导
R = c o s θ I + ( 1 − c o s θ ) n n T + s i n θ n ˆ \bm{R} = cos\theta\bm{I} + (1-cos\theta)\bm{n}\bm{n}^T + sin\theta\bm{n}\^{} R=cosθI+(1−cosθ)nnT+sinθnˆ2、 R \bm{R} R ——> θ n \theta\bm{n} θn
推导: 上述转换公式两边取 迹【矩阵的对角线元素之和;单位向量的迹为1】
- 反对称矩阵的主对角线元素必是零,所以其迹数为零
t r ( R ) = c o s θ ⋅ t r ( I ) + ( 1 − c o s θ ) ⋅ t r ( n n T ) + s i n θ ⋅ t r ( n ˆ ) = 3 c o s θ + ( 1 − c o s θ ) = 1 + 2 c o s θ \begin{align*} tr(\bm{R}) & = cos\theta ·tr({\bm{I}}) + (1-cos\theta) ·tr({\bm{n}\bm{n}^T}) + sin\theta · tr({\bm{n}\^{}} )\\ &= 3cos\theta + (1-cos\theta) \\ & = 1 + 2cos\theta \end{align*} tr(R)=cosθ⋅tr(I)+(1−cosθ)⋅tr(nnT)+sinθ⋅tr(nˆ)=3cosθ+(1−cosθ)=1+2cosθ
θ = a c o c o s t r ( R ) − 1 2 \theta = acocos\frac{tr(\bm{R})-1}{2} θ=acocos2tr(R)−1
旋转轴上的向量在旋转后不发生改变, 即
R n = n \bm{Rn = n} Rn=n
转轴 n \bm{n} n = 矩阵 R \bm{R} R 的特征值 1 对应的特征向量。
3.3.2 欧拉角 (一个旋转 分解成 3次 绕不同轴的旋转)
偏航-俯仰-滚转(yaw-pitch-roll) ZYX
一个三维向量 描述 任意旋转: [ r , p , y ] T [r, p, y]^T [r,p,y]T
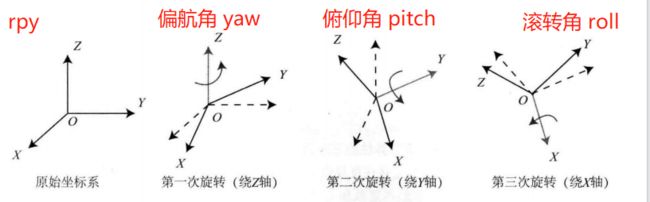

欧拉角 缺点: 万向锁问题 (Gimbal Lock)
在俯仰角为 ± 90° 时, 第一次旋转与第三次旋转将使用同一个轴,使得系统丢失了一个自由度(由 3 次旋转变成了 2 次 旋转) 奇异性问题
——————————————————————
欧拉角 不适用于:
1、插值 和 迭代
2、滤波 和 优化
适用于: 人机交互。
2D 运动的场合(扫地机、自动驾驶) 可将旋转 分解成 三个 欧拉角, 把其中一个 作为 定位信息。
——————————————————————
旋转向量的奇异性: 转角 θ \theta θ 超过 2 π 2\pi 2π 产生周期性时。
3.4 四元数(Quaternion)
1、旋转矩阵: 9个量 描述 3 自由度 冗余
2、欧拉角 和 旋转向量: 奇异性
- 用两个坐标表示地球表面(如经度 和 纬度) 存在奇异性 (纬度为 ± 90°时 经度 无意义)
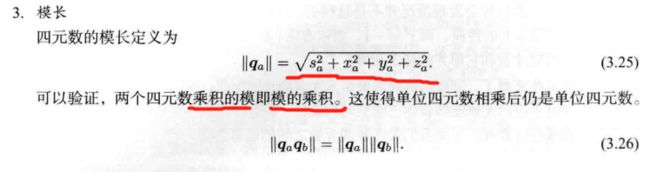
3、四元数 紧凑且 没有奇异性 不够直观、运算稍复杂

——————————————
四元数的运算

四元数乘法 不可交换



四元数 表示旋转
空间三维点: p = [ x , y , z ] \bm{p}=[x, y, z] p=[x,y,z]
一个由单位四元数 q \bm{q} q 指定的 旋转
三维点 p \bm{p} p 经旋转之后 变成了 p ′ \bm{p}^{\prime} p′
矩阵描述: p ′ = R p \bm{p}^{\prime} = \bm{Rp} p′=Rp
————————
四元数表示:
1、三维空间点 用一个 虚四元数 来描述:
- 相当于将 四元数的3个虚部 与 空间的3个轴 相对应。
p = [ 0 , x , y , z ] T = [ 0 , v ] T \bm{p} = [0, x, y, z]^T = [0, \bm{v}]^T p=[0,x,y,z]T=[0,v]T
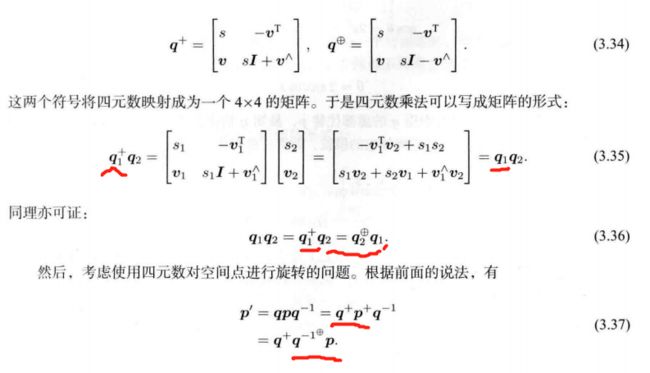
2、旋转后
p ′ = q p q − 1 \bm{p}^{\prime} = \bm{qpq^{-1}} p′=qpq−1
可证明 结果 p ′ \bm{p}^{\prime} p′ 的实部为0, 虚部即为旋转之后的坐标。
3.4.4 四元数 到 其他旋转表示 的转换
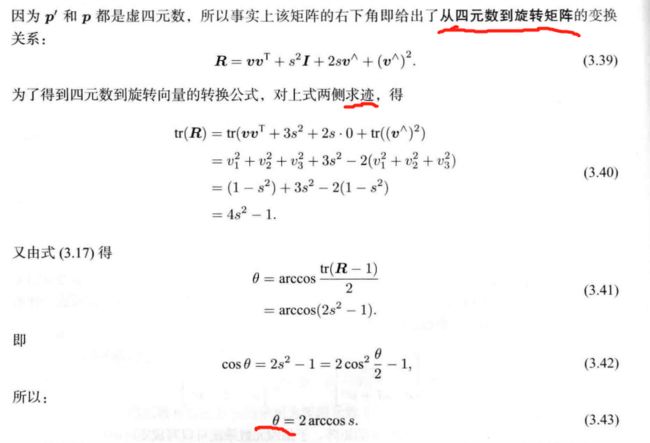
四元数 ——> 旋转矩阵

推导过程

四元数 ——> 旋转向量
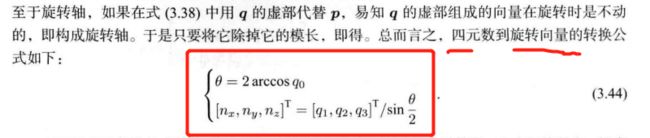
推导过程
——————
其它 会变形变换
从真实世界 到 相机照片 的变换是一个射影变换, 如果相机的焦距为无穷远,那么这个变换为仿射变换。

4、射影变换:近大远小 不规则的四边形
a T \bm{a}^T aT 为缩放
2D 的射影变换 一共有8 个自由度, 3D有 15个自由度。
3、仿射变换 要求A为可逆,不必是正交【欧式变换要求是正交】。 正交投影 平行四边形
2、相似变换 面积改变
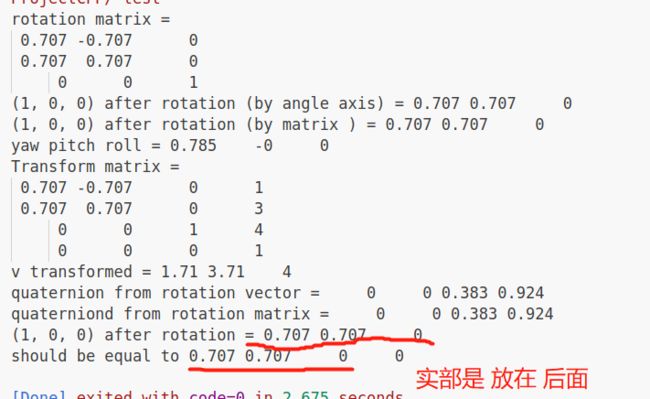
Code实践_ Eigen 几何模块

#includeEigen 官方文档
链接:Eigen 官方文档
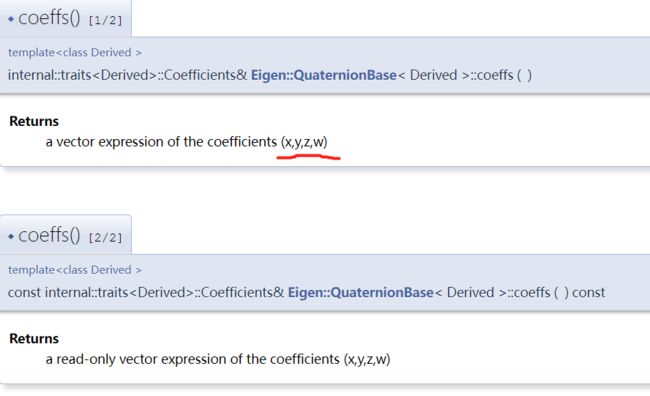
函数: coeffs()
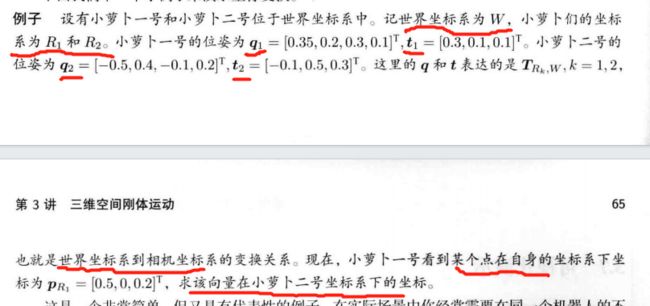
坐标变换 举例:
![]()
#include![]()
3.7.1 运动轨迹 显示
源码 下成 第一版的了 。。。。

pangolin安装
注释



上述 显示相机位姿的.cpp 文件
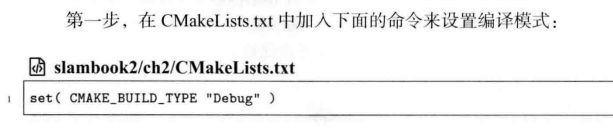
#include CMakeLists.txt
cmake_minimum_required( VERSION 2.8 )
project( visualizeGeometry )
set(CMAKE_CXX_FLAGS "-std=c++11")
# 添加Eigen头文件
include_directories( "/usr/include/eigen3" )
# 添加Pangolin依赖
find_package( Pangolin )
include_directories( ${Pangolin_INCLUDE_DIRS} )
add_executable( visualizeGeometry visualizeGeometry.cpp )
target_link_libraries( visualizeGeometry ${Pangolin_LIBRARIES} )
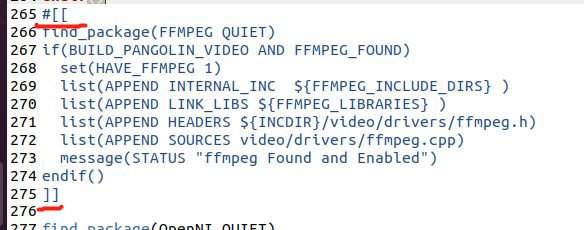
!!!一些文件的注释语法

———————— 只是下错 版本了,下成版本1的源码了
问题: 在文件里 没找到example 文件夹
下载特定文件夹网址: http://kinolien.github.io/gitzip/
粘贴该地址: https://github.com/gaoxiang12/slambook2/tree/master/ch3/examples
补上了

——————————
#include 1、将路径改为 绝对路径

输出绝对路径 命令
pwd

mkdir build && cd build # 要是已经建过 build ,直接 cd build
cmake ..
make
./plotTrajectory


CMakeLists.txt
include_directories("/usr/include/eigen3")
add_executable(coordinateTransform coordinateTransform.cpp)
find_package(Pangolin REQUIRED)
include_directories(${Pangolin_INCLUDE_DIRS})
add_executable(plotTrajectory plotTrajectory.cpp)
target_link_libraries(plotTrajectory ${Pangolin_LIBRARIES})
习题
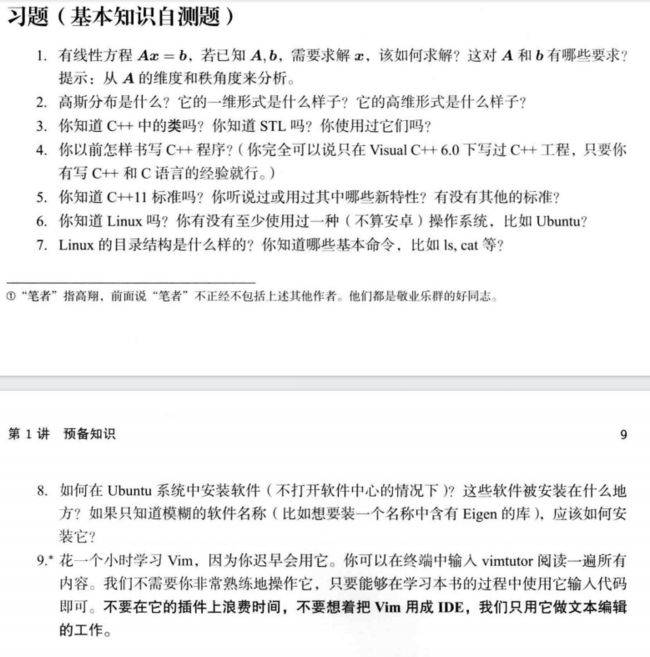
P8
1、
2、高斯分布
也称为 正态分布
p ( x ; μ , σ 2 ) = 1 2 π σ e x p ( − ( x − μ ) 2 2 σ 2 ) p(x; μ, σ^2)=\frac{1}{\sqrt{2π}σ}exp(-\frac{(x-μ)^2}{2σ^2}) p(x;μ,σ2)=2πσ1exp(−2σ2(x−μ)2)

3、
STL:
STL(Standard Template Library,标准模板库)是惠普实验室开发的一系列软件的统称。
STL的代码从广义上讲分为三类:algorithm(算法)、container(容器)和iterator(迭代器)
在C++标准中,STL被组织为下面的13个头文件:、
5、C++标准
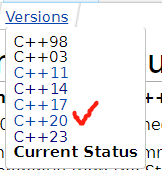
C++14说明文档
ls --help
cat --help
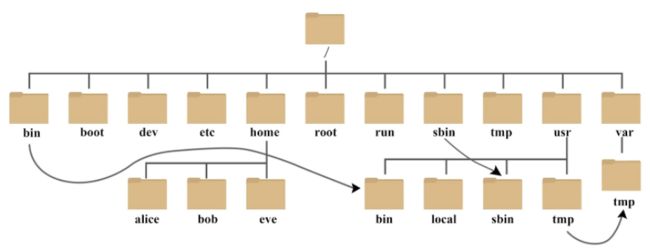
7、Linux的目录结构

8、Ubuntu 安装软件
在Ubuntu 16 之前要使用apt-get install 软件包来安装,在Ubuntu 16 之后可以直接使用apt install 软件包来安装。这种方法安装的包有时候不好用,比如VSCode 会无法使用中文输入。

sudo dpkg -i 文件名.deb
5)、CMake 方法,包里包含 CMakeLists.txt文件
mkdir build && cd build
cmake ..
make
sudo make install

两种写法均可 在g++后添加 -o 输出文件名
g++ -o helloSLAM.exe helloSLAM.cpp
g++ helloSLAM.cpp -o helloSLAM.out

习题_第 3 讲 三维空间刚体运动

√ 题1
1、验证旋转矩阵 是 正交矩阵。
正交矩阵满足 A A T = I \bm{AA^T} = I AAT=I, 即只要满足 A − 1 = A T \bm{A^{-1}} = \bm{A^T} A−1=AT, 则 A \bm{A} A 是正交矩阵。
根据 P44 页的定义:

R = [ e 1 T e 1 ′ e 1 T e 2 ′ e 1 T e 3 ′ e 2 T e 1 ′ e 2 T e 2 ′ e 2 T e 3 ′ e 3 T e 1 ′ e 3 T e 2 ′ e 3 T e 3 ′ ] \bm{R} = \begin{bmatrix} e_1^Te_1^{\prime} & e_1^Te_2^{\prime} & e_1^Te_3^{\prime} \\ e_2^Te_1^{\prime} & e_2^Te_2^{\prime} & e_2^Te_3^{\prime} \\ e_3^Te_1^{\prime} & e_3^Te_2^{\prime} & e_3^Te_3^{\prime} \end{bmatrix} R= e1Te1′e2Te1′e3Te1′e1Te2′e2Te2′e3Te2′e1Te3′e2Te3′e3Te3′
R T = [ e 1 T e 1 ′ e 1 T e 2 ′ e 1 T e 3 ′ e 2 T e 1 ′ e 2 T e 2 ′ e 2 T e 3 ′ e 3 T e 1 ′ e 3 T e 2 ′ e 3 T e 3 ′ ] T = [ e 1 ′ T e 1 e 2 ′ T e 1 e 3 ′ T e 1 e 1 ′ T e 2 e 2 ′ T e 2 e 3 ′ T e 2 e 1 ′ T e 3 e 2 ′ T e 3 e 3 ′ T e 3 ] \bm{R^T} = \begin{bmatrix} e_1^Te_1^{\prime} & e_1^Te_2^{\prime} & e_1^Te_3^{\prime} \\ e_2^Te_1^{\prime} & e_2^Te_2^{\prime} & e_2^Te_3^{\prime} \\ e_3^Te_1^{\prime} & e_3^Te_2^{\prime} & e_3^Te_3^{\prime} \end{bmatrix}^T = \begin{bmatrix} {e_1^{\prime}}^Te_1& {e_2^{\prime}}^Te_1 & {e_3^{\prime}}^Te_1 \\ {e_1^{\prime}}^Te_2& {e_2^{\prime}}^Te_2 & {e_3^{\prime}}^Te_2 \\ {e_1^{\prime}}^Te_3& {e_2^{\prime}}^Te_3 & {e_3^{\prime}}^Te_3 \end{bmatrix} RT= e1Te1′e2Te1′e3Te1′e1Te2′e2Te2′e3Te2′e1Te3′e2Te3′e3Te3′ T= e1′Te1e1′Te2e1′Te3e2′Te1e2′Te2e2′Te3e3′Te1e3′Te2e3′Te3
对于 式(3.5), 同时左乘 [ e 1 ′ , e 2 ′ , e 3 ′ ] T [e_1^{\prime} , e_2^{\prime} , e_3^{\prime} ]^T [e1′,e2′,e3′]T
[ e 1 ′ , e 2 ′ , e 3 ′ ] T [ e 1 , e 2 , e 3 ] [ a 1 a 2 a 3 ] = [ e 1 ′ , e 2 ′ , e 3 ′ ] T [ e 1 ′ , e 2 ′ , e 3 ′ ] [ a 1 ′ a 2 ′ a 3 ′ ] [e_1^{\prime} , e_2^{\prime} , e_3^{\prime} ]^T[e_1, e_2, e_3] \begin{bmatrix} a_1 \\ a_2 \\ a_3 \end{bmatrix}= [e_1^{\prime} , e_2^{\prime} , e_3^{\prime} ]^T[e_1^{\prime} , e_2^{\prime} , e_3^{\prime}]\begin{bmatrix} a_1^{\prime} \\ a_2^{\prime} \\ a_3^{\prime} \end{bmatrix} [e1′,e2′,e3′]T[e1,e2,e3] a1a2a3 =[e1′,e2′,e3′]T[e1′,e2′,e3′] a1′a2′a3′
等式右边 由于 [ e 1 ′ , e 2 ′ , e 3 ′ ] [e_1^{\prime} , e_2^{\prime} , e_3^{\prime} ] [e1′,e2′,e3′] 为单位正交基,得到 单位矩阵,则:
[ e 1 ′ T e 1 e 2 ′ T e 1 e 3 ′ T e 1 e 1 ′ T e 2 e 2 ′ T e 2 e 3 ′ T e 2 e 1 ′ T e 3 e 2 ′ T e 3 e 3 ′ T e 3 ] [ a 1 a 2 a 3 ] = [ a 1 ′ a 2 ′ a 3 ′ ] \begin{bmatrix} {e_1^{\prime}}^Te_1& {e_2^{\prime}}^Te_1 & {e_3^{\prime}}^Te_1 \\ {e_1^{\prime}}^Te_2& {e_2^{\prime}}^Te_2 & {e_3^{\prime}}^Te_2 \\ {e_1^{\prime}}^Te_3& {e_2^{\prime}}^Te_3 & {e_3^{\prime}}^Te_3 \end{bmatrix}\begin{bmatrix} a_1 \\ a_2 \\ a_3 \end{bmatrix}=\begin{bmatrix} a_1^{\prime} \\ a_2^{\prime} \\ a_3^{\prime} \end{bmatrix} e1′Te1e1′Te2e1′Te3e2′Te1e2′Te2e2′Te3e3′Te1e3′Te2e3′Te3 a1a2a3 = a1′a2′a3′
与 式 (3.6) 对比,可得
R − 1 = [ e 1 ′ T e 1 e 2 ′ T e 1 e 3 ′ T e 1 e 1 ′ T e 2 e 2 ′ T e 2 e 3 ′ T e 2 e 1 ′ T e 3 e 2 ′ T e 3 e 3 ′ T e 3 ] = R T \bm{R^{-1}} = \begin{bmatrix} {e_1^{\prime}}^Te_1& {e_2^{\prime}}^Te_1 & {e_3^{\prime}}^Te_1 \\ {e_1^{\prime}}^Te_2& {e_2^{\prime}}^Te_2 & {e_3^{\prime}}^Te_2 \\ {e_1^{\prime}}^Te_3& {e_2^{\prime}}^Te_3 & {e_3^{\prime}}^Te_3 \end{bmatrix} = \bm{R^T} R−1= e1′Te1e1′Te2e1′Te3e2′Te1e2′Te2e2′Te3e3′Te1e3′Te2e3′Te3 =RT
证毕。
√ 题2
2、罗德里格斯公式推导
已知 旋转向量 为 θ n \theta\bm{n} θn, 求相应的旋转矩阵。
![]()
参考:维基百科证明链接

向量 v \bm{v} v 沿着单位旋转轴 n \bm{n} n 旋转 θ \theta θ 后得到向量 v r o t \bm{v}_{rot} vrot
对于相应的旋转矩阵 R \bm{R} R,有 v r o t = R v \bm{v}_{rot}=\bm{R}\bm{v} vrot=Rv
——> 目标: 用 v \bm{v} v 表示 v r o t , R 用 n 和 θ \bm{v}_{rot},\bm{R} 用 \bm{n} 和 \theta vrot,R用n和θ表示
将向量 v \bm{v} v 分解为平行于单位旋转轴 n \bm{n} n 的分量 v ∥ \bm{v}_{\parallel} v∥和 平行于单位旋转轴 n \bm{n} n 法平面的分量 v ⊥ \bm{v}_{\perp} v⊥
v = v ∥ + v ⊥ \bm{v} = \bm{v}_{\parallel}+\bm{v}_{\perp} v=v∥+v⊥
v r o t = v r o t ∥ + v r o t ⊥ \bm{v}_{rot} = \bm{v}_{{rot}\parallel} +\bm{v}_{{rot}\perp} vrot=vrot∥+vrot⊥
其中 v r o t ∥ = v ∥ \bm{v}_{{rot}\parallel}=\bm{v}_{\parallel} vrot∥=v∥
现在找 v r o t ⊥ \bm{v}_{{rot}\perp} vrot⊥ 和 v ⊥ \bm{v}_{\perp} v⊥之间的关系。
- 同一平面,方便转换
注意 旋转向量的旋转角的定义,是 v r o t ⊥ \bm{v}_{{rot}\perp} vrot⊥ 和 v ⊥ \bm{v}_{\perp} v⊥ 之间的角度, 本题图中 θ \theta θ 为钝角。旋转前后向量的模不变。
叉乘的右手定则: 右手四指沿着 叉乘的第一个向量朝第二个向量弯曲,与拇指朝向相同的为正。否则为负。
v r o t ⊥ = 平行于 v ⊥ 的分量 + 平行于 n × v ⊥ ( 即 w ) 的分量 = − c o s ( 180 − θ ) v ⊥ + s i n ( 180 − θ ) n × v ⊥ = c o s θ v ⊥ + s i n ( θ ) n × v ⊥ \begin{align*}\bm{v}_{{rot}\perp} &= 平行于 \bm{v}_{\perp}的分量 + 平行于 \bm{n}×\bm{v}_{\perp} (即\bm{w})的分量 \\ & = -cos(180-\theta)\bm{v}_{\perp} + sin(180-\theta) \bm{n}×\bm{v}_{\perp} \\ & = cos\theta\bm{v}_{\perp} + sin(\theta) \bm{n}× \bm{v}_{\perp} \end{align*} vrot⊥=平行于v⊥的分量+平行于n×v⊥(即w)的分量=−cos(180−θ)v⊥+sin(180−θ)n×v⊥=cosθv⊥+sin(θ)n×v⊥
则
v r o t = v r o t ∥ + v r o t ⊥ = v ∥ + c o s θ v ⊥ + s i n ( θ ) n × v ⊥ = v ∥ + c o s θ ( v − v ∥ ) + s i n ( θ ) n × v ⊥ = c o s θ v + ( 1 − c o s θ ) v ∥ + s i n ( θ ) n × v ⊥ 想办法把其中的分量都转成 v 和 n 其中 v ∥ = ( n ⋅ v ) n : 点乘得到投影的模再乘上向量方向 n × v ⊥ = n × ( v − v ∥ ) = n × v 。两平行向量叉乘结果为 0 。 原式 = c o s θ v + ( 1 − c o s θ ) ( n ⋅ v ) n + s i n ( θ ) n × v = ( c o s θ I + ( 1 − c o s θ ) n n + s i n ( θ ) n ˆ ) v = ( c o s θ I + ( 1 − c o s θ ) n n T + s i n ( θ ) n ˆ ) v 即 R = c o s θ I + ( 1 − c o s θ ) n n T + s i n ( θ ) n ˆ 注意 n ˆ 等效于 n × \begin{align*}\bm{v}_{rot} & = \bm{v}_{{rot}\parallel} +\bm{v}_{{rot}\perp}\\ &=\bm{v}_{\parallel}+ cos\theta\bm{v}_{\perp} + sin(\theta) \bm{n}× \bm{v}_{\perp} \\ &=\bm{v}_{\parallel}+ cos\theta(\bm{v}-\bm{v}_{\parallel} )+ sin(\theta) \bm{n}× \bm{v}_{\perp} \\ &= cos\theta\bm{v}+(1-cos\theta)\bm{v}_{\parallel} + sin(\theta) \bm{n}× \bm{v}_{\perp} \\ & 想办法把其中的分量都转成 \bm{v} 和 \bm{n} \\ & 其中 \bm{v}_{\parallel} = (\bm{n}·\bm{v})\bm{n}: 点乘得到投影的模再乘上向量方向\\ &\bm{n}× \bm{v}_{\perp} = \bm{n}× (\bm{v} - \bm{v}_{\parallel}) = \bm{n}× \bm{v} 。两平行向量叉乘结果为0。\\ 原式 & = cos\theta\bm{v}+(1-cos\theta) (\bm{n}·\bm{v})\bm{n} + sin(\theta) \bm{n}× \bm{v} \\ & = (cos\theta\bm{I} +(1-cos\theta) \bm{n}\bm{n} + sin(\theta) \bm{n}\^{} )\bm{v} \\ & = (cos\theta\bm{I} +(1-cos\theta) \bm{n}\bm{n}^T + sin(\theta) \bm{n}\^{} )\bm{v} \\ 即 \bm{R} &= cos\theta\bm{I} +(1-cos\theta) \bm{n}\bm{n}^T + sin(\theta) \bm{n}\^{} \\ & 注意 \bm{n}\^{} 等效于 \bm{n}× \\ \end{align*} vrot原式即R=vrot∥+vrot⊥=v∥+cosθv⊥+sin(θ)n×v⊥=v∥+cosθ(v−v∥)+sin(θ)n×v⊥=cosθv+(1−cosθ)v∥+sin(θ)n×v⊥想办法把其中的分量都转成v和n其中v∥=(n⋅v)n:点乘得到投影的模再乘上向量方向n×v⊥=n×(v−v∥)=n×v。两平行向量叉乘结果为0。=cosθv+(1−cosθ)(n⋅v)n+sin(θ)n×v=(cosθI+(1−cosθ)nn+sin(θ)nˆ)v=(cosθI+(1−cosθ)nnT+sin(θ)nˆ)v=cosθI+(1−cosθ)nnT+sin(θ)nˆ注意nˆ等效于n×
证毕。
√ 题3
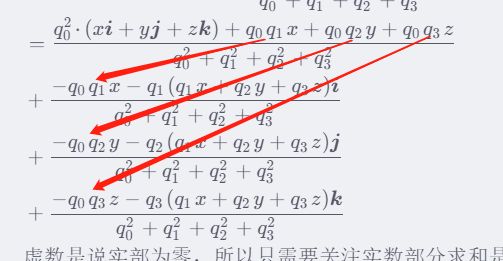
3、验证四元数旋转某个点后,结果是一个虚四元数(实部为零),所以仍然对应到一个三维空间点。
![]()

![]()

![]()

p ′ = q p q − 1 = q p q ∗ / ∣ ∣ q ∣ ∣ 2 = ( q 0 + q 1 i + q 2 j + q 3 k ) ⋅ ( 0 + x i + y j + z k ) ⋅ ( q 0 − q 1 i − q 2 j − q 3 k ) q 0 2 + q 1 2 + q 2 2 + q 3 2 由于垂直向量点乘为 0 : 原式 = ( q 0 ⋅ ( x i + y j + z k ) + q 1 x + q 2 y + q 3 z ) ⋅ ( q 0 − q 1 i − q 2 j − q 3 k ) q 0 2 + q 1 2 + q 2 2 + q 3 2 = q 0 2 ⋅ ( x i + y j + z k ) + q 0 q 1 x + q 0 q 2 y + q 0 q 3 z q 0 2 + q 1 2 + q 2 2 + q 3 2 + − q 0 q 1 x − q 1 ( q 1 x + q 2 y + q 3 z ) i q 0 2 + q 1 2 + q 2 2 + q 3 2 + − q 0 q 2 y − q 2 ( q 1 x + q 2 y + q 3 z ) j q 0 2 + q 1 2 + q 2 2 + q 3 2 + − q 0 q 3 z − q 3 ( q 1 x + q 2 y + q 3 z ) k q 0 2 + q 1 2 + q 2 2 + q 3 2 虚四元数的实部为零,所以只需要重点关注实数部分求和是否为 0 即可: = q 0 2 x − q 1 ( q 1 x + q 2 y + q 3 z ) q 0 2 + q 1 2 + q 2 2 + q 3 2 i + q 0 2 y − q 2 ( q 1 x + q 2 y + q 3 z ) q 0 2 + q 1 2 + q 2 2 + q 3 2 j + q 0 2 z − q 3 ( q 1 x + q 2 y + q 3 z ) q 0 2 + q 1 2 + q 2 2 + q 3 2 k \begin{align*}\bm{p}^\prime &= \bm{qpq^{-1}} \\ &= \bm{qpq^*/||q||^2} \\ & = \frac{(q_0 + q_1\bm{i}+q_2\bm{j}+q_3\bm{k})·(0 + x\bm{i}+y\bm{j}+z\bm{k})·(q_0 - q_1\bm{i}-q_2\bm{j}-q_3\bm{k})}{q_0^2 +q_1^2 +q_2^2 +q_3^2 } \\ &由于垂直向量 点乘为0 :\\ 原式 & = \frac{(q_0·( x\bm{i}+y\bm{j}+z\bm{k})+ q_1x + q_2y +q_3z)·(q_0 - q_1\bm{i}-q_2\bm{j}-q_3\bm{k})}{q_0^2 +q_1^2 +q_2^2 +q_3^2 } \\ & = \frac{q_0^2·( x\bm{i}+y\bm{j}+z\bm{k})+ q_0q_1x + q_0q_2y +q_0q_3z }{q_0^2 +q_1^2 +q_2^2 +q_3^2 }\\ & +\frac{ - q_0q_1x-q_1( q_1x + q_2y +q_3z)\bm{i}}{q_0^2 +q_1^2 +q_2^2 +q_3^2 } \\ & +\frac{ - q_0q_2y-q_2( q_1x + q_2y +q_3z)\bm{j}}{q_0^2 +q_1^2 +q_2^2 +q_3^2 } \\ & +\frac{ - q_0q_3z-q_3( q_1x + q_2y +q_3z)\bm{k}}{q_0^2 +q_1^2 +q_2^2 +q_3^2 } \\ & 虚四元数的实部为零,所以只需要重点关注实数部分求和是否为0即可:\\ & = \frac{q_0^2x-q_1( q_1x + q_2y +q_3z)}{q_0^2 +q_1^2 +q_2^2 +q_3^2 }\bm{i}+ \frac{q_0^2y-q_2( q_1x + q_2y +q_3z)}{q_0^2 +q_1^2 +q_2^2 +q_3^2 }\bm{j}+\frac{q_0^2z-q_3( q_1x + q_2y +q_3z)}{q_0^2 +q_1^2 +q_2^2 +q_3^2 }\bm{k} \end{align*} p′原式=qpq−1=qpq∗/∣∣q∣∣2=q02+q12+q22+q32(q0+q1i+q2j+q3k)⋅(0+xi+yj+zk)⋅(q0−q1i−q2j−q3k)由于垂直向量点乘为0:=q02+q12+q22+q32(q0⋅(xi+yj+zk)+q1x+q2y+q3z)⋅(q0−q1i−q2j−q3k)=q02+q12+q22+q32q02⋅(xi+yj+zk)+q0q1x+q0q2y+q0q3z+q02+q12+q22+q32−q0q1x−q1(q1x+q2y+q3z)i+q02+q12+q22+q32−q0q2y−q2(q1x+q2y+q3z)j+q02+q12+q22+q32−q0q3z−q3(q1x+q2y+q3z)k虚四元数的实部为零,所以只需要重点关注实数部分求和是否为0即可:=q02+q12+q22+q32q02x−q1(q1x+q2y+q3z)i+q02+q12+q22+q32q02y−q2(q1x+q2y+q3z)j+q02+q12+q22+q32q02z−q3(q1x+q2y+q3z)k
实部为0,转换后仍对应到一个三维空间点,证毕。

叉乘实在反应不过来,还是老老实实点乘算吧
√ 题4
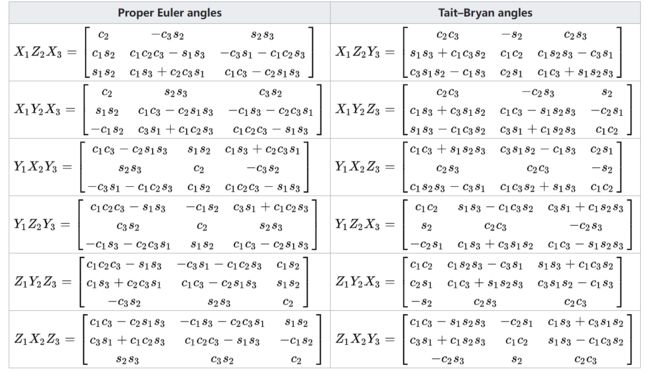
4、画表总结 旋转矩阵、轴角、欧拉角、四元数的转换关系。

维基百科链接

√ 题5
5、假设有一个大的 Eigen 矩阵,想把它的左上角 3 × 3 的块取出来,然后赋值为 I 3 × 3 \bm{I}_{3 × 3} I3×3 。请编程实现。
块操作官方文档

#include 

#include 题6
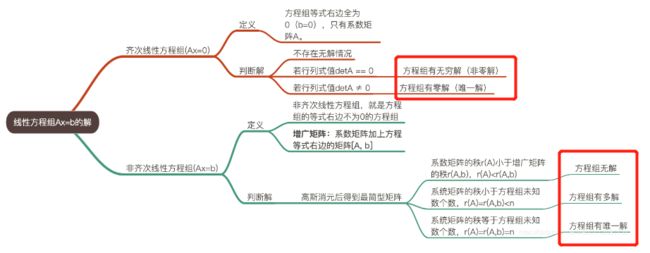
6、一般线性方程 A x = b \bm{Ax=b} Ax=b有哪几种做法?你能在Eigen中实现吗?
待做:
- 进一步了解每种求解方法的原理
Ax=b求解Eigen官方文档链接
Eigen 提供了 8种API

使用 Eigen 求解线性最小二乘系统。有一个超定方程组,比如 A x = b \bm{Ax=b} Ax=b 没有解。在这种情况下,搜索最接近解的向量 x \bm{x} x 是有意义的,使此时的差值 A x − b \bm{Ax-b} Ax−b 尽可能小。这个 x \bm{x} x 称为最小二乘解(如果使用欧几里得范数)。后两种方法用于 求解 无解的情况
#include 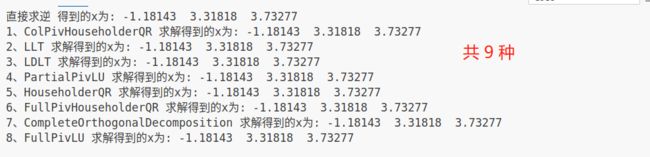
——————参考资料:
参考 P50 (第50页) 的代码。
LLT要求最严苛: 正定
官网LLT示例代码:
#include Eigen(http://eigen.tuxfamily.org)是常用的 C++ 矩阵运算库,具有很高的运算效率。大部分需要在 C++ 中使用矩阵运算的库,都会选用 Eigen 作为基本代数库,例如 Google Tensorflow,Google Ceres,GTSAM 等。
高斯消元法: 加减消元、回代求未知数值

官方文档: http://eigen.tuxfamily.org/dox/group__TutorialLinearAlgebra.html
#include
#include 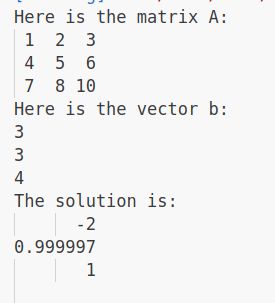
第13行 等效写法:
ColPivHouseholderQR<Matrix3f> dec(A);
Vector3f x = dec.solve(b);
ColPivHouseholderQR是一个带有列枢轴的QR分解。这是一个很好的折衷方案,因为它**适用于所有矩阵,同时速度相当快。**下面是一些其他分解的表格,你可以从中选择,这取决于你的矩阵,你想要解决的问题,以及你想要做出的权衡:
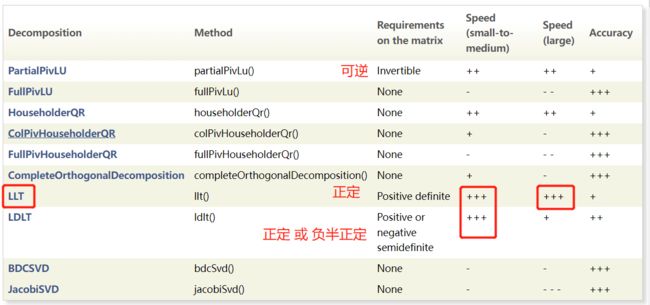
无要求、准确且 速度还行:

对于求解具有满秩非对称矩阵的线性系统,一个很好的选择是PartialPivLU。
矩阵是对称且正定的,一个很好的选择是LLT或LDLT分解。
正定必可逆

更详细的内容
————————————
可不看
————————————
其它内容:

SLAM: Simultaneous Localization and Mapping 同时定位与地图构建。
Eigen、OpenCV、PCL、g2o、Ceres 等库
视觉里程估计

C++版本OpenCVgithub代码库链接
成像匹配: 不同时间、分辨率、光照、位姿。
角点特征
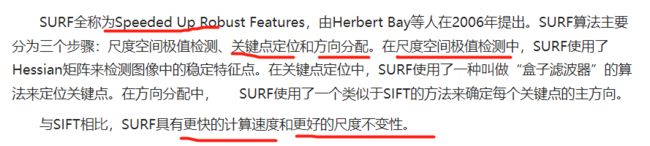
SIFT尺度不变特征变换(Scale-Invariant Feature Transform)
其包括 特征点检测,特征点描述子计算 及 特征点匹配算法三块。
尺度不变, 光照变化、图像旋转、视角变化。
缺点: 运算复杂度高、耗时

Shi-Tomasi角点/GFTT(Good Features to Track)角点
Shi-Tomasi 发现,角点的稳定性其实和矩阵 M 的较小特征值有关,于是直接用较小的那个特征值作为分数。
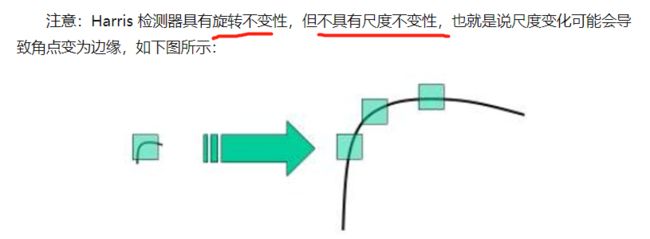
Harris角点与Shi-Tomasi角点都是基于梯度计算的角点检测方法,其计算复杂度高.
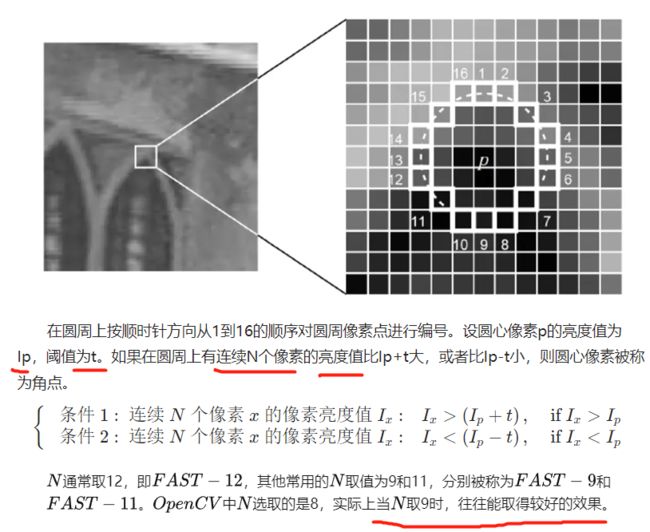
Fast
(Features from Accelerated Segment Test)由Edward Rosten和Tom Drummond在2006年首先提出
Fast算法的基本原理就是使用周长为16个像素点(半径为3的Bresenham圆)来判定其圆心像素是否为角点。
ORB

FAST: 加快 寻找特征点 的速度
BRIEF: 解决 描述子 的空间占用冗余
- BRIEF:Binary Robust Independent Elementary Features
二进制 异或

实时性好: Shi-Tomasi,ORB
SLAM 十四讲 第7讲 视觉里程计 1
视觉前端 优化后端
前端 视觉里程计(VO, Visual Odometry)
基于 特征点法 的前端: 运行稳定,对光照、动态物体不敏感。
稳定的局部特征:
SIFT(尺度不变特征变换,Scale-Invariant Feature Transform)
- 到目前(2016 年)为止,普通 PC 的 CPU还无法实时地计算 SIFT 特征,进行定位与建图。所以在 SLAM 中我们甚少使用这种“奢侈”的图像特征。