三维数学(一)
视频教程:https://www.bilibili.com/video/BV12s411g7gU?p=155
目录
向量
向量的运算(一)
三角函数
向量运算(二)
向量常用属性及方法
向量
一个数字列表,表示各个维度上的有向位移;同时也是一个有大小有方向的物理量,大小及向量的模长,而方向即空间中向量的指向,可以表示物体的位置和方向
向量的形式

向量的大小(模)
向量各分量平方和的平方根
API :
Vector3.magnitude:模长
Vector3..sqrMagnitude:模长的平方
向量的方向
获取向量方向也称“标准化向量”,或“归一化向量”,即该向量的单位向量(大小为1的向量)。
几何意义︰将该向量拉长或者缩短,使模长等于1
![]()
API:
Vector3.normalized:获取该向量的单位向量
Vector3 vector2=vector1.normalized;//vector2为vector1的单位向量Vector3.Normalize:将该向量自身设置为单位向量
vector1.Normalize();//将vector1自身设置为单位向量private void Update()
{
Demo01();
Demo02();
}
//模长
private void Demo01()
{
Vector3 pos = this.transform.position;
float m01 = Mathf.Sqrt(Mathf.Pow(pos.x, 2) + Mathf.Pow(pos.y, 2) + Mathf.Pow(pos.z, 2));
float m02 = pos.sqrMagnitude;
float m03 = Vector3.Distance(Vector3.zero, pos);
Debug.LogFormat("{0}--{1}--{2}", m01, m02, m03);
Debug.DrawLine(Vector3.zero, pos);
}
//方向
private void Demo02()
{
Vector3 pos = this.transform.position;
Vector3 n01 = pos / pos.magnitude;
Vector3 n02 = pos.normalized;
Debug.DrawLine(Vector3.zero, n02, Color.red);
}向量的运算(一)
向量相减:等于各分量相加减,应用于计算两点间的距离和相对方向
![]()
几何意义:向量a与向量b相减,结果理解为以b的终点为始点,以a的终点为终点的向量。方向由b指向a

向量相加:等于各分量相加和,应用于物体移动
![]()
几何意义:向量a与向量b相加,平移使b的始点与a的终点重合,结果为以a的始点为始点,以b的终点为终点的向量
向量与标量的乘除
乘法:该向量的各分量与标量相乘;k[xy,z]= [xk,yk,zk]
除法:该向量的各分量与标量相除;[x,y,z]/k = [x/k,y/k,z/k]
几何意义:缩放向量长度
ps:当要将某一将向量缩放至特定长度,可以先获取该向量的方向向量,再乘/除以比例系数
public Transform t1, t2, t3;
private void Update()
{
Demo03();
}
//向量运算
private void Demo03()
{
//t1相对于t2的位置
//其大小为两点间距离
Vector3 relativeDirection = t1.position - t2.position;
//t3沿relativeDirection方向移动
if (Input.GetKeyDown(KeyCode.A))
//获取方向向量,避免两物体间距离对速度造成影响
//t3.Translate(relativeDirection.normalized * 0.5f);
t3.position+=relativeDirection.normalized;
Debug.DrawLine(Vector3.zero, relativeDirection);
}
三角函数
角的度量方式
PI=180度 1弧度=180度/PI 1角度=PI/180度
角度-->弧度:弧度=角度数*PI/180
API:弧度=角度数*Mathf.Deg2Rad
弧度-->角度:角度=弧度数*180/PI
API:角度=弧度数*Mathf.Rad2Deg
private void Demo01()
{
//角度-->弧度:弧度=角度数*PI/180
float d1 = 60;
float r1 = d1 * Mathf.PI / 180;
float r2 = d1 * Mathf.Deg2Rad;
print("角度-->弧度:" + d1 + "-->" + r1 + "/" + r2);
}
private void Demo02()
{
//弧度-->角度:角度=弧度数*180/PI
float r1 = 3;
float d1 = r1 * 180 / Mathf.PI;
float d2 = r1 * Mathf.Rad2Deg;
print("弧度-->角度:" + r1 + "-->" + d1 + "/" + d2);
}三角函数
建立了直角三角形中角与边长比值的关系

正弦:sin x = a / c
余弦:cos x = b / c
正切:tan x = a / b
API(以弧度为单位):
正弦:Mathf.Sin
余弦:Mathf.Cos
正切:Mathf.Tan
反三角函数
反正弦,反余弦,反正切等函数的总称;可用于根据两边长,计算角度
反正弦:arcsin a / c = x
反余弦:arccos b / c = x
反正切:arctan a / b = x;
API(以弧度为单位):
反正弦:Mathf.Asin
反余弦:Mathf.Acos
反正切:Mathf.Atan
private void Demo03()
{
//已知角度x,边长b,求边长a
float x = 50, b = 20;
float a = Mathf.Tan(x * Mathf.Deg2Rad);
//已知边长a,边长b,求角度angle
float angle = Mathf.Atan(a / b) * Mathf.Rad2Deg;
print(angle);
}
private void Demo04()
{
//将自身坐标系转换到世界坐标系中
//Vector3 worldPos = transform.TransformPoint(0, 0, 10);
//计算物体前方30度,10m远的坐标
float x = Mathf.Sin(30 * Mathf.Deg2Rad) * 10;
float z = Mathf.Cos(30 * Mathf.Deg2Rad) * 10;
Vector3 worldPos = transform.TransformPoint(x, 0, z);
print(worldPos);
}Transform.TransformPoint(Vector3 position):将position从本地空间变换到世界空间
向量运算(二)
点乘
又称“点积”或”内积”

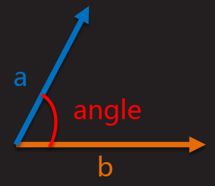
几何意义:两个向量的单位向量相乘后再乘以二者夹角的余弦值
a-b=|a|·|b| cos
应用:计算两向量夹角;对于标准化的向量,点乘结果等于两向量夹角的余弦值
API:
Vector3.Dot:两个向量的点积,点积是一个浮点值,等于将两个向量的大小相乘,然后乘以向量之间角度的余弦值
public Transform t1, t2, t3;
//点乘
//计算两向量夹角的cos值
float dot = Vector3.Dot(t1.position.normalized,t2.position.normalized);
float angle= Mathf.Acos(dot)*Mathf.Rad2Deg;ps:点乘能计算两向量夹角的cos值,但无法确定角的象限;想要确定角的象限应结合向量的叉乘
对于标准化过的向量,若两方向相同,点乘结果为1;反之,点乘结果为-1;互相垂直结果为0

叉乘
又称“叉积”或”外积”
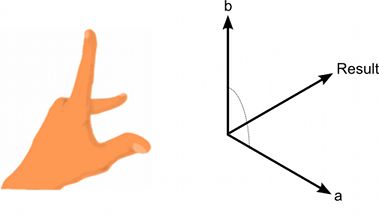
![]()
几何意义:结果为两个向量所组成面的垂直向量,模长为两向量模长乘积再乘夹角的正弦值
应用:1.创建垂直于平面的向量;2.判断两条向量相对位置。

API:
Vector3.Cross:两个向量的叉积,两个向量的叉积生成第三个向量, 该向量垂直于两个输入向量
//点乘
//计算两向量夹角的cos值
float dot = Vector3.Dot(t1.position.normalized,t2.position.normalized);
float angle= Mathf.Acos(dot)*Mathf.Rad2Deg;
//叉乘
Vector3 cross=Vector3.Cross(t1.position,t2.position);
if(cross.y<0)
{
angle=360-angle;
}
Debug.DrawLine(Vector3.zero,cross);ps:根据“左手规则”确定结果向量的方向
叉乘所得向量的模长与角度:0~90度

向量常用属性及方法
静态属性
1.Vector3.up-->new Vector3(0,1,0)
2.Vector3.down-->new vector3(0,-1,0)
3.Vector3.left-->new Vector3(-1,0,0)
4.Vector3.right-->new Vector3(1,0,0)
5.Vector3.forward-->new Vector3(0,0,1)
6.Vector3.back-->new Vector3(0,0,-1)
静态方法
1.Vector3.Lerp&Vector3.LerpUnclamped
Vector3.Lerp:
//将物体移动到(0,0,10)
//先快后慢 不能到达目标点(无限接近)
this.transform.position = Vector3.Lerp(this.transform.position, targetPos, 0.1f);Vector3.LerpUnclamped:
参数设置

点击Curve属性编辑曲线

public AnimationCurve curve;
private float x = 0;
//持续时间
public float duration;
x += Time.deltaTime / duration;
//自然运动 起始点固定 终点固定 比例根据曲线变化
this.transform.position = Vector3.LerpUnclamped(Vector3.zero, targetPos, curve.Evaluate(x));2.Vector3.MoveTowards(Vector3 current, Vector3 target, float maxDistanceDelta):计算current指定的点与target指定的点之间的位置,移动距离不超过maxDistanceDelta指定的距离
| current | 移动的起始位置 |
| target | 移动的目标位置 |
| maxDistanceDelta | 每次调用移动的距离 |
//将物体移动到(0,0,10)
//匀速移动,可到达目标点
this.transform.position = Vector3.MoveTowards(this.transform.position, targetPos, 1);3.Vector3.SmoothDamp(Vector3 current, Vector3 target, ref Vector3 currentVelocity, float smoothTime, float maxSpeed= Mathf.Infinity, float deltaTime= Time.deltaTime):随时间推移将一个向量逐渐改变为所需目标
| current | 当前位置 |
| target | 尝试达到的目标 |
| currentVelocity | 当前速度,此值由函数在每次调用时进行修改 |
| smoothTime | 达到目标所需的近似时间。值越小,达到目标的速度越快 |
| maxSpeed | 可以选择允许限制最大速度 |
| deltaTime | 自上次调用此函数以来的时间。默认情况下为 Time.deltaTime |
4.Vector3.Angle(Vector3 from, Vector3 to):返回两个向量之间的角度(以度为单位)
| from | 测量角度差的源向量 |
| to | 测量角度差的目标向量 |
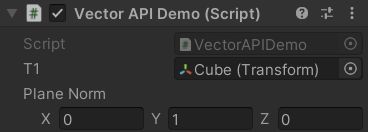
5.Vector3.ProjectOnPlane(Vector3 vector, Vector3 planeNormal):将向量投影到由法线定义的平面上(法线与该平面正交)
| planeNormal | 从矢量到平面的方向 |
| vector | 平面上方的矢量的位置 |
public Transform t1;
public Vector3 planeNorm;
private Vector3 targetPos = new Vector3(0, 0, 10);
private void Update()
{
Vector3 res = Vector3.ProjectOnPlane(t1.position, planeNorm);
Debug.DrawLine(Vector3.zero, t1.position);
Debug.DrawLine(Vector3.zero, res, Color.red);
}参数设置
运行
6.Vector3.Reflect(Vector3 inDirection, Vector3 inNormal):从法线定义的平面反射一个向量
inNormal向量定义一个平面(平面的法线是垂直于其表面的向量),inDirection向量被视为进入该平面的定向箭头,返回值是与inDirection大小相等、方向为其反射方向的向量
