FairMOT论文阅读笔记
Abstract
近些年目标检测和Re-ID有很大的发展,但是没有人在单个网络中联合这两个任务。由于re-ID任务没有公平的学习,这导致了大量id的转换。不公平之处在于两个方面:(1)他们将重新身份识别视为次要任务,其准确性在很大程度上取决于主要检测任务。所以训练很大程度上偏向于检测任务,而忽略了重识别任务;(2)它们使用感兴趣区域对齐来提取直接从对象检测中借用的重标识特征。然而,这在表征对象时引入了许多模糊性,因为许多采样点可能属于干扰实例或背景。为了解决这些问题,我们提出了一种简单的方法FairMOT,它由两个同质分支组成,用于预测像素级的对象分数和重新识别特征。
Introduction
这部分主要讲解了在摘要里指出的以往的方法中学习的不公平性的体现。
1.由于anchor 导致的不公平学习
当前的单步法跟踪器都是基于anchor锚的,因为它们是从对象检测器修改而来的。但是,有两个原因造成了锚点不适合学习Re-ID功能。首先,对应于不同图像块的多个锚点可能负责估计同一个目标的 id,这导致严重的歧义(参见图 1)。此外,需要将特征图的大小缩小 1/8,以平衡准确率和速度。对于检测任务而言这是可以接受的,但对于 Re-ID 来说就有些粗糙了,因为目标中心可能无法与在粗糙锚点位置提取的特征一致。
文章中提出解决该问题的方法,是通过将MOT问题看作为在高分辨率特征图上的像素级关键点(目标中心)估计和 id 分类问题。
2.由于特征导致的不公平性
对于一次性跟踪器,大多数功能在对象检测和重新标识任务之间共享。但是众所周知,它们实际上需要来自不同层的特征来实现最佳结果。特别是,对象检测需要深度和抽象的特征来估计对象类别和位置,但重新标识更侧重于低级的外观特征,以区分同一类别的不同实例。
3.由于特征尺度导致的不公平性
在以往的re-ID任务中,往往是学习高纬度的特征,然而我们发现,学习低纬度的特征比one-shot MOT更好,原因有三::(1)虽然学习高维re-ID特征可能会略微提高其分辨能力,但由于两个任务的竞争,它会显著损害对象检测的准确性,这反过来也会对最终的跟踪精度产生负面影响(2)当训练数据较少时,学习低维重ID特征降低了过拟合的风险。MOT中的数据集通常比重标识区域中的数据集小得多。因此有利于降低特征尺寸;(3)学习低维重标识特征提高了推理速度
FariMOT
 该研究提出的 one-shot MOT 跟踪器图示。首先将输入图像送入编码器-解码器网络,以提取高分辨率特征图(步幅=4);然后添加两个简单的并行 head,分别预测边界框和 Re-ID 特征;最后提取预测目标中心处的特征进行边界框时序联结。
该研究提出的 one-shot MOT 跟踪器图示。首先将输入图像送入编码器-解码器网络,以提取高分辨率特征图(步幅=4);然后添加两个简单的并行 head,分别预测边界框和 Re-ID 特征;最后提取预测目标中心处的特征进行边界框时序联结。
首先,采用 anchor-free 目标检测方法,估计高分辨率特征图上的目标中心。去掉锚点这一操作可以缓解歧义问题,使用高分辨率特征图可以帮助 Re-ID 特征与目标中心更好地对齐。
然后,添加并行分支来估计像素级 Re-ID 特征,这类特征用于预测目标的 id。具体而言,学习既能减少计算时间又能提升特征匹配稳健性的低维 Re-ID 特征。在这一步中,本文用深层聚合算子(Deep Layer Aggregation,DLA)来改进主干网络 ResNet-34 ,从而融合来自多个层的特征,处理不同尺度的目标。
1.Backbone
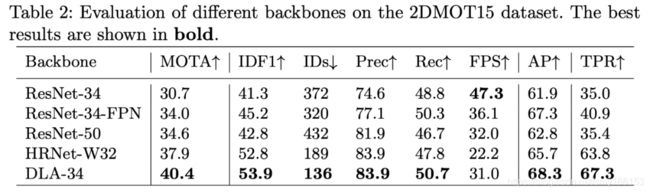
采用ResNet-34 作为主干网络,以便在准确性和速度之间取得良好的平衡。为了适应不同规模的对象,如图2所示,将深层聚合(DLA)的一种变体应用于主干网络。
与原始DLA 不同,它在低层聚合和低层聚合之间具有更多的跳跃连接,类似于特征金字塔网络(FPN)。此外,上采样模块中的所有卷积层都由可变形的卷积层代替,以便它们可以根据对象的尺寸和姿势动态调整感受野。 这些修改也有助于减轻对齐问题。
2.检测分支
本方法中将目标检测视为高分辨率特征图上基于中心的包围盒回归任务。特别是,将三个并行回归头(regression heads)附加到主干网络以分别估计热图,对象中心偏移和边界框大小。 通过对主干网络的输出特征图应用3×3卷积(具有256个通道)来实现每个回归头(head),然后通过1×1卷积层生成最终目标。
Heatmap Head
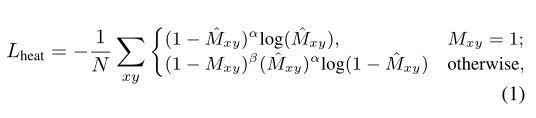
这个head负责估计对象中心的位置。这里采用基于热图的表示法,热图的尺寸为1×H×W。 随着热图中位置和对象中心之间的距离,响应呈指数衰减。对于每个GT框 b i = ( x 1 i , y 1 i , x 2 i , y 2 i ) b^i =(x_1^i, y_1^i,x_2^i,y_2^i) bi=(x1i,y1i,x2i,y2i) 来说,它的中心是 ( c x i , c y i ) (c_x^i, c_y^i) (cxi,cyi) 其中 c x i = x 1 i + x 2 i 2 c_x^i = \frac {x_1^i+x_2^i}{2} cxi=2x1i+x2i, y 1 i + y 2 i 2 \frac{y_1^i+y_2^i}{2} 2y1i+y2i 由于步长为4,所以它在特征图上的位置是 ( c ~ x i , c ~ y i ) = ( ⌊ c x i 4 ⌋ , ⌊ c y i 4 ⌋ ) (\tilde c_x^i,\tilde c_y^i) = ( \lfloor \frac{c_x^i}{4}\rfloor ,\lfloor \frac{c_y^i}{4}\rfloor) (c~xi,c~yi)=(⌊4cxi⌋,⌊4cyi⌋).其中热力图响应为

loss 函数为
Center Offset Head
该head负责更精确地定位对象。ReID功能与对象中心的对齐精准度对于性能至关重要。
Box Size Head
该部分负责估计每个锚点位置的目标边界框的高度和宽度,与Re-ID功能没有直接关系,但是定位精度将影响对象检测性能的评估。
对于size 和offset的输出为 S ^ ∈ R W × H × 2 \hat S\in R^{W \times H\times2} S^∈RW×H×2和 S ^ ∈ O W × H × 2 \hat S\in O^{W \times H\times2} S^∈OW×H×2对于每个GT框 b i = ( x 1 i , y 1 i , x 2 i , y 2 i ) b^i =(x_1^i, y_1^i,x_2^i,y_2^i) bi=(x1i,y1i,x2i,y2i),我们可以算出size为 s i = ( x 2 i − x 1 i , y 2 i − y 1 i ) s^i=(x_2^i-x_1^i,y_2^i-y_1^i) si=(x2i−x1i,y2i−y1i),offset 为 o i = ( c x i 4 , c y i 4 ) − ( ⌊ c x i 4 ⌋ , ⌊ c y i 4 ⌋ ) o^i= ( \frac{c_x^i}{4} , \frac{c_y^i}{4})-( \lfloor \frac{c_x^i}{4}\rfloor ,\lfloor \frac{c_y^i}{4}\rfloor) oi=(4cxi,4cyi)−(⌊4cxi⌋,⌊4cyi⌋) 最终我们对两个head使用L1 loss,这部分的loss为

3.Re-ID分支
Re-ID分支旨在生成能够区分对象的特征。我们要使不同对象之间的相似性应该小于相同对象之间的相似性。为了实现这个目标,我们在主干特征上应用了一个包含128个核的卷积层来提取每个位置的Re-ID特征.最后的到特征图 E ∈ R 128 × W × H E\in R^{128\times W\times H} E∈R128×W×H,对于每个以 ( x , y ) (x,y) (x,y)为中心的对象Re-ID特征为 E x , y ∈ R 128 E_{x,y}\in R^{128} Ex,y∈R128
Re-ID的loss为

4.训练FairMOT
最终,我们使用的loss为

其中 ω 1 \omega_1 ω1和 ω 2 \omega_2 ω2是学习来的参数,用来平衡两个任务
5.推理
网络以大小为1088×608的图像作为输入,与之前的工作JDE相同。在预测的heatmap之上,根据heatmap得分执行非最大抑制(NMS)来提取最大的关键点。我们保留heatmap得分大于阈值的关键点的位置。然后,我们根据预测的偏移量和框的大小计算相应的边框。我们还在预测的目标中心提取Re-ID特征向量。
Online Box Linking
使用标准的在线跟踪算法来实现框的链接。根据第一帧中的估计框初始化了一些轨迹,在接下来的帧中,根据Re-ID特征和IoU所测量的轨迹距离,将方框与现有轨迹链接起来。也使用卡尔曼滤波来预测在当前帧中的轨迹位置。如果距离连接检测太远,将相应的代价设为无穷大,可以有效地阻止大运动的链接检测。我们在每个时间步中更新跟踪器的外观特征,以处理外观变化。