基于STM32HAL库 AD9959调试笔记
接线方式
采用最简单的两线模式,不使用RU/RD,二级调制模式,SD1/SD2/SD3全部拉低,P0-P3不用配置没什么影响,PDC脚必须拉低
在CubeMX中配置如下

数据手册
时序图

时序图解析:CS先拉低——SDIO_0在SCLK上升沿传送/接收数据——CS拉高
先发送寄存器地址,在发送寄存器数据
//控制寄存器通过spi向AD9959写入数据
void WriteData_9959(uint8_t addr,uint8_t num,uint8_t *data)
{
int i,j;
uint8_t ValueToWrite = 0;
//先拉底CS引脚
HAL_GPIO_WritePin(CS_GPIO_Port,CS_Pin,GPIO_PIN_RESET);
for(i = 0;i<8;i++)
{
HAL_GPIO_WritePin(SCK_GPIO_Port,SCK_Pin,GPIO_PIN_RESET);
if((addr & 0x80) == 0x80)
{
HAL_GPIO_WritePin(SDIO0_GPIO_Port,SDIO0_Pin,GPIO_PIN_SET);
}
else
HAL_GPIO_WritePin(SDIO0_GPIO_Port,SDIO0_Pin,GPIO_PIN_RESET);
HAL_Delay(1);
HAL_GPIO_WritePin(SCK_GPIO_Port,SCK_Pin,GPIO_PIN_SET);
addr<<=1;
}
HAL_GPIO_WritePin(SCK_GPIO_Port,SCK_Pin,GPIO_PIN_RESET);
for(i = 0;i另外注意发送数据时从数组中下标为0的开始,但是接收时是高位在前低位在后
每次向寄存器写入数据后UPDATE引脚发送一个高脉冲更新一下。
void delay1 (uint32_t length)
{
length = length*24;
while(length--);
}
//AD9959更新数据
void IO_update(void)
{
HAL_GPIO_WritePin(AD9959_UPDATE_GPIO_Port,AD9959_UPDATE_Pin,GPIO_PIN_RESET);
delay1(2);
HAL_GPIO_WritePin(AD9959_UPDATE_GPIO_Port,AD9959_UPDATE_Pin,GPIO_PIN_SET);
delay1(4);
HAL_GPIO_WritePin(AD9959_UPDATE_GPIO_Port,AD9959_UPDATE_Pin,GPIO_PIN_RESET);
}这个delay时间数据手册这里提到了,随便给个1us就应该很够了

这个要求还是很宽容的,基本不用怎么注意

寄存器
一定要配置FR1寄存器!!!一开始没配置导致波形上下飘而且有残缺

设置对应通道前在CSR寄存器中选中,一次只能配置一个通道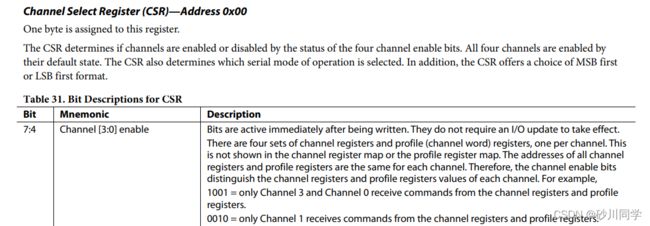
根据数据手册可写出
uint8_t CSR_DATA0[1] = {0x10}; // 开 CH0
uint8_t CSR_DATA1[1] = {0x20}; // 开 CH1
uint8_t CSR_DATA2[1] = {0x40}; // 开 CH2
uint8_t CSR_DATA3[1] = {0x80}; // 开 CH3 为了产生波形我们需配置频率、幅度、相位寄存器

频率32bit,相位16bit,幅度10bit
接口函数编写
写的时候又犯了一个错误就是没注意运算符优先级
CFTWO[2] = (uint8_t)temp>>8;
CFTWO[2] = (uint8_t)(temp>>8);上面这两种写法产生的结果是不一样的
//FTW/2^32=freq
void Write_frequence(uint8_t channel,uint32_t freq)
{
uint8_t CFTWO[4] = {0x00,0x00,0x00,0x00};
uint32_t temp;
temp=(uint32_t)freq*8.589934592; //将输入频率因子分为四个字节 8.589934592=(2^32)/1000000000
//从数组0开始发送。但实际数据是从高位到地位接收的
CFTWO[3] = (uint8_t)temp;
CFTWO[2] = (uint8_t)(temp>>8);
CFTWO[1] = (uint8_t)(temp>>16);
CFTWO[0] = (uint8_t)(temp>>24);
switch(channel)
{
case 1:WriteData_9959(CSR_ADDR,1,CSR_DATA0);break;//开启通道一
case 2:WriteData_9959(CSR_ADDR,1,CSR_DATA1);break;
case 3:WriteData_9959(CSR_ADDR,1,CSR_DATA2);break;
case 4:WriteData_9959(CSR_ADDR,1,CSR_DATA3);break;
default:break;
}
WriteData_9959(CFTWO_ADDR,4,CFTWO);
}理解这段代码之后写幅度和相位的也很容易了
最后产生的波形还是比较满意的
(2022.7.24更新,后面发现AD9959的相位在频率100khz就已经有比较大的误差了,不适于用来产生两路正交信号,但是用于100hz-100khz的扫频还是非常合适的。初始化之前最好还是RST一下,不然有概率没有信号产生)
