强化学习入门8—深入理解DDPG
文章目录
- Deep Deterministic Policy Gradient
-
- 简介
- 网络结构
- 算法流程
- 小结
本文是强化学习入门系列的第八篇,前面我们讲Actor-Critic时提到了DDPG。DDPG是google DeepMind团队提出的一种用于输出确定性动作的算法,它解决了Actor-Critic 神经网络每次参数更新前后都存在相关性,导致神经网络只能片面的看待问题这一缺点。同时也解决了DQN不能用于连续性动作的缺点。
Deep Deterministic Policy Gradient
简介
DDPG即深度确定性策略梯度算法。也是一种可以解决连续性控制问题的方法。属于model-free、off-policy、policy-based的方法。原文传送:
- Silver, David, et al. “Deterministic policy gradient algorithms.” ICML. 2014.(前序工作)
- Lillicrap, Timothy P., et al. “Continuous control with deep reinforcement learning.” arXiv preprint arXiv:1509.02971 (2015).
DDPG我们可以拆开来看,Deep,是说明需要神经网络。Deterministic的意思就是最终确定地只输出一个动作。Policy Gradient我们已经知道是策略梯度算法。DDPG可以看成是DQN的扩展版,不同的是,以往的DQN在最终输出的是一个动作向量,对于DDPG是最终确定地只输出一个动作。而且,DDPG让 DQN 可以扩展到连续的动作空间。
网络结构
DDPG的结构形式类似Actor-Critic。DDPG可以分为策略网络和价值网络两个大网络。DDPG延续DQN了固定目标网络的思想,每个网络再细分为目标网络和现实网络。不过目标网络的更新上有些不同。下面详细分析。
先来看策略网络,也就是Actor。Actor输出的是一个确定性的动作,产生这个确定性动作的网络定义为 a = μ θ ( s ) a=\mu_{\theta}(s) a=μθ(s)。以往的policy gradient采取的是随机策略,每一次获取动作都需要对当前的最优策略的分布进行采样,而DDPG采取的则是确定性策略,直接通过函数 μ \mu μ 确定。Actor的估计网络就是 μ θ ( s ) \mu_{\theta}(s) μθ(s), θ \theta θ 就是神经网络的参数,这个估计网络就是用来输出实时的动作。此外,Actor还有一个相同结构但不同参数的目标网络,是用来更新价值网络Critic的。两个网络都是输出动作action。
再来看价值网络,也就是Critic。它的作用就是来拟合价值函数 Q ω ( s , a ) Q_{\omega}(s,a) Qω(s,a)。同样也有一个估计网络和一个目标网络。这两个网络在输出端都输出当前状态的价值 q-value,在输入端则有所不同。Critic的目标网络输入有两个参数,分别是当前状态的观测值和Actor的目标网络输出的动作action。Critic的估计网络的输入则是当前Actor的估计网络输出的动作action。目标网络是用来计算 Q t a r g e t Q_{target} Qtarget,
下面我们通过一张图来直观的理解下整个过程:

我们可以看到,价值网络的更新是基于TD-error的梯度下降,Critic作为评委,一开始也不知道Actor输出的动作是否足够好,它也需要一步一步学习给出准确的打分,所以借助于目标网络拟合的下一时刻的价值 Q ω Q_{\omega} Qω,以及真实的收益r,我们可以得到 Q t a r g e t Q_{target} Qtarget,让 Q t a r g e t Q_{target} Qtarget 减去当前 Q Q Q 求均方差,则可以构造出Loss。更新方法其实和DQN差不多的,唯一不同的地方在于目标网络的参数在DDPG算法中是缓慢更新的,而不是在DQN中每隔N步将现有网络的参数直接复制过来。
而策略网络(Actor)的更新是基于梯度上升,因为Actor的目标就是找到一个动作a能使得输出的价值Q最大,所以优化策略网络的梯度就是要最大化价值网络输出的这个Q值。Loss函数就加上一个负号方便最小化误差。
值得注意的是,DDQG也借鉴了DQN的经验回放 (Experience Replay)的技巧。DDPG同样会把一段时间的序列 ( s , a , r , s ′ ) (s,a,r,s') (s,a,r,s′) 存储到经验池。每次训练的时候,从经验池随机采样一个minibatch来训练就好。
算法流程
伪代码如下:
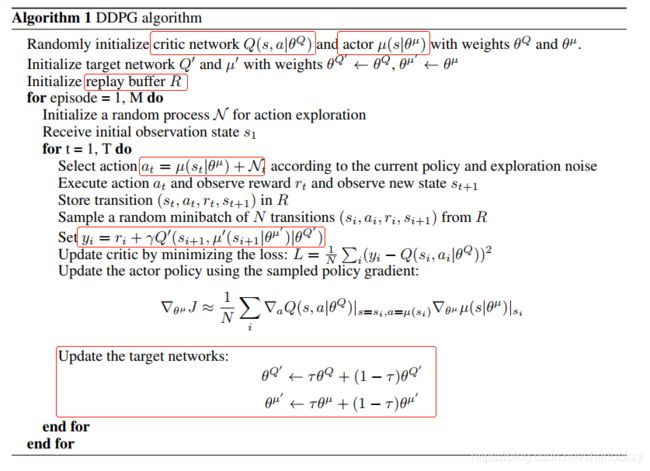
首先,初始化Actor和Critic以及其各自的目标网络共4个网络以及经验池replay buffer R。
在Actor网络输出动作时,DDPG通过添加随机噪声的方式实现exploration,可以让智能体更好的探索潜在的最优策略。之后是采取经验回放的技巧。把智能体与环境交互的数据 ( s t , a t , r t , s t + 1 ) (s_t,a_t,r_t,s_{t+1}) (st,at,rt,st+1) 存储到R。随后每次训练从中随机采样一个minibatch。
在参数更新上,先利用Critic的目标网络 Q ′ Q' Q′ 来计算目标值 y i y_i yi,利用 y i y_i yi 与当前Q值的均方误差构造损失函数,进行梯度更新。对于Actor的策略网络,其实就是把Actor的确定性动作函数代进Q-function的a,然后求梯度,最后是更新目标网络。
小结
简单来说:DQN+Actor-Critic =>Deep Deterministic Policy Gradient (DDPG)。实际上DDPG其实更接近DQN,只是采用了类似Actor-Critic的结构。DDPG吸收了Actor-Critic中策略梯度单步更新的优点,同时还吸收了DQN对Q值估计的技巧。DDPG 最大的优势就是能够在连续动作上更有效地学习。
参考
- 什么是 DDPG - 强化学习 (Reinforcement Learning) | 莫烦Python (mofanpy.com)
- 第十二章 深度确定性策略梯度 (DDPG) 算法 (datawhalechina.github.io)
- 【强化学习】DDPG(Deep Deterministic Policy Gradient)算法详解_shura的技术空间-CSDN博客_ddpg
- 深度强化学习笔记——DDPG原理及实现(pytorch) - 知乎 (zhihu.com)