c++视觉处理---计算轮廓面积
矩的计算:cv::moments
cv::moments 是OpenCV中用于计算图像或轮廓的矩特征的函数。矩特征是一种用于描述图像或轮廓的几何特性的方法,包括中心矩、归一化中心矩、中心矩矩和归一化中心矩矩等。这些特征在形状分析、对象识别和物体测量等领域非常有用。
cv::moments 函数的基本用法如下:
cv::Moments cv::moments(const cv::Mat& array, bool binaryImage = false);
array: 输入的图像或轮廓。binaryImage: 一个布尔值,指定输入是否为二进制图像。如果设置为true,将仅考虑轮廓内的像素。
这个函数返回一个 cv::Moments 对象,其中包含了各种矩特征的值,可以通过 m 成员变量来访问这些值,如 m.m00、m.m01、m.m10 等。
轮廓面积:cv::contourArea
cv::contourArea 是OpenCV中用于计算轮廓的面积的函数。它接受一个轮廓作为输入,并返回该轮廓所围成区域的面积。这个函数非常有用,可以用于形状分析、对象测量和图像处理中的各种任务。
cv::contourArea 函数的基本用法如下:
double cv::contourArea(const std::vector<cv::Point>& contour, bool oriented = false);
contour: 输入的轮廓,通常是一个std::vector。oriented: 一个布尔值,指定是否考虑轮廓的方向。如果设置为true,则会考虑轮廓的方向,如果为false,则忽略方向。
这个函数返回一个 double 类型的值,表示轮廓所围成区域的面积。
cv::arcLength
cv::arcLength 是OpenCV中用于计算轮廓的弧长(周长)的函数。它接受一个轮廓作为输入,并返回轮廓的弧长。弧长是轮廓的所有线段(弧段)长度的总和。
轮廓长度:cv::arcLength 函数的基本用法如下:
double cv::arcLength(const std::vector<cv::Point>& contour, bool closed);
contour: 输入的轮廓,通常是一个std::vector。closed: 一个布尔值,指定轮廓是否封闭。如果设置为true,则轮廓被认为是封闭的,如果为false,则认为是开放的。
这个函数返回一个 double 类型的值,表示轮廓的弧长。
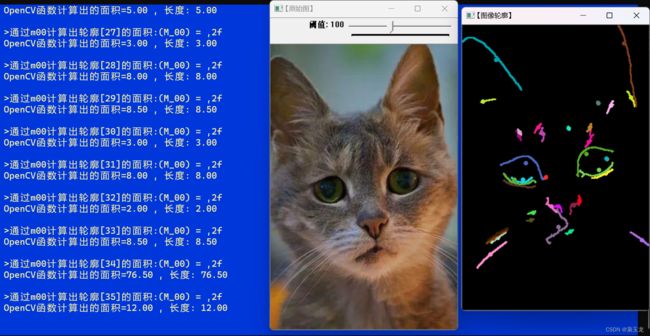
查找和绘制图像轮廓矩
#include