YOLOv3 | 核心主干网络,特征图解码,多类损失函数详解
https://zhuanlan.zhihu.com/p/76802514)
文章目录
- 1. 核心改进
-
- 1.1主干网络
- 1.2 特征图解码
-
- 1.2.1 检测框(位置,宽高)解码
- 1.2.2 检测置信度解码
- 1.2.3 类别解码
- 1.3 训练损失函数
-
- 1.3.1 正负样本定义
- 1.3.2 损失函数
1. 核心改进
1.1主干网络
更深,更宽
从v2的darknet-19到v3的darknet-53
并且引入了ResNet的网络
结构解析
(1)整个v3结构里面,是没有池化层和全连接层的。前向传播过程中,张量的尺寸变换是通过改变卷积核的步长来实现的
(2)yolo v3输出了3个不同尺度的feature map,如上图所示的y1, y2, y3。这也是v3论文中提到的为数不多的改进点:predictions across scales,这个实际借鉴了FPN(feature pyramid networks),采用多尺度来对不同size的目标进行检测,越精细的grid cell就可以检测出越精细的物体,小尺寸特征图用于检测大尺寸物体,大尺寸特征图检测小尺寸物体。
特征图的输出维度为 N × N × 255 = N × N × [ 3 × ( 4 + 1 + 80 ) ] N×N×255= N×N×[3×(4+1+80)] N×N×255=N×N×[3×(4+1+80)]
N×N 为输出特征图格点数,对应原网络中有三种8×8,16×16,32×32
255则对应等式右边的3×(4+1+80)
3表示一共有3个Anchor框
而对于每个框有4维预测框数值(x, y, w, h) ,1维预测框置信度confidence,80维物体类别数(COCO数据集是80类)
所以
第一层特征图的输出维度为 8×8×255
第二层特征图输出16×16×255
第三层特征图输出32×32×255
(3)上采样层(upsample):作用是将小尺寸特征图通过插值等方法,生成大尺寸图像。例如使用最近邻插值算法,将88的图像变换为1616。上采样层不改变特征图的通道数。
举一个例子
这里我们以 256 × 256 256 \times 256 256×256的输入尺度说明,看如下图各个尺寸和通道数的变化
图片出自Algernon
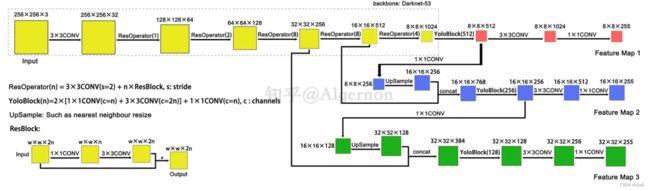
上面的网络输出的最后一个维度255是怎么用来训练呢?那就是要经过一个解码的步骤,将255按照实际意义**(output_size, output_size, anchor_per_scale, 5 + num_classes)**拆解出来,才能还原出我们预测的坐标。
1.2 特征图解码
解码就是说我们拿到特征图向量,怎么将他与实际的含义匹配呢
1.2.1 检测框(位置,宽高)解码
在Yolov1中,网络直接回归检测框的宽、高,这样效果有限。所以在Yolov2中,改为了回归基于先验框的变化值,这样网络的学习难度降低,整体精度提升不小。Yolov3沿用了Yolov2中关于先验框的技巧,并且使用k-means对数据集中的标签框进行聚类,得到类别中心点的9个框,作为先验框。先验框可以理解为在这个数据集中我的框普遍是接近这9个框的大小的
我们模型预测到相对于这几个框的
在COCO数据集中(原始图片全部resize为416 × 416),九个框分别是 (10×13),(16×30),(33×23),(30×61),(62×45),(59× 119), (116 × 90), (156 × 198),(373 × 326) ,顺序为( p w , p h p_w,p_h pw,ph) 宽,高
实际转换公式如下
其中
b x , b y . b w , b h b_x,b_y.b_w,b_h bx,by.bw,bh是最终解码得到的检测框真实值
(b_w,b_h)还不是最终的值,还需要乘特征图下采样率
t x , t y , t w , t h t_x,t_y,t_w,t_h tx,ty,tw,th是模型预测值
c x , c y c_x,c_y cx,cy是中心点左上角点的相对值
σ \sigma σ 是激活函数,论文中作者使用sigmoid


1.2.2 检测置信度解码
置信度在输出85维中占固定一位,由sigmoid函数解码即可,解码之后数值区间在[0,1]中
1.2.3 类别解码
COCO数据集有80个类别,所以类别数在85维输出中占了80维,每一维独立代表一个类别的置信度
不过YOLOv3使用sigmoid激活函数替代了Yolov2中的softmax,取消了类别之间的互斥,可以使网络更加灵活。
1.3 训练损失函数
1.3.1 正负样本定义
预测框一共分为三种情况:正例(positive)、负例(negative)、忽略样例(ignore)对于每一种样例的损失计算方式不同
- 正例:任取一个ground truth,与4032个框全部计算IOU,IOU最大的预测框,即为正例。并且一个预测框,只能分配给一个ground truth。例如第一个ground truth已经匹配了一个正例检测框,那么下一个ground truth,就在余下的4031个检测框中,寻找IOU最大的检测框作为正例。ground truth的先后顺序可忽略。正例产生置信度loss、检测框loss、类别loss。预测框为对应的ground truth box标签(需要反向编码,使用真实的x、y、w、h计算出 );类别标签对应类别为1,其余为0;置信度标签为1。
- 忽略样例:正例除外,与任意一个ground truth的IOU大于阈值(论文中使用0.5),则为忽略样例。忽略样例不产生任何loss。
- 负例:正例除外(与ground truth计算后IOU最大的检测框,但是IOU小于阈值,仍为正例),与全部ground truth的IOU都小于阈值(0.5),则为负例。负例只有置信度产生loss,置信度标签为0。
1.3.2 损失函数
最终损失函数为

Yolov3 Loss为三个特征图Loss之和:
![]()
其中 λ \lambda λ为权重常数,控制检测框Loss、obj置信度Loss、noobj置信度Loss之间的比例,通常负例的个数是正例的几十倍以上,可以通过权重超参控制检测效果。
1 i j o b j \mathbf{1}_{ij}^{obj} 1ijobj 在正样本时正例则输出1,否则为0
1 i j n o o b j \mathbf{1}_{ij}^{noobj} 1ijnoobj 在负样本呢则输出1,否则为0
忽略样例都输出0
x、y、w、h使用MSE作为损失函数,也可以使用smooth L1 loss作为损失函数。smooth L1可以使训练更加平滑。置信度、类别标签由于是0,1二分类,所以使用交叉熵作为损失函数。
Algeronon对YOLOv3的这部分思考我觉得超级赞,引用如下
- ground truth为什么不按照中心点分配对应的预测box?
(1)在Yolov3的训练策略中,不再像Yolov1那样,每个cell负责中心落在该cell中的ground truth。原因是Yolov3一共产生3个特征图,3个特征图上的cell,中心是有重合的。训练时,可能最契合的是特征图1的第3个box,但是推理的时候特征图2的第1个box置信度最高。所以Yolov3的训练,不再按照ground truth中心点,严格分配指定cell,而是根据预测值寻找IOU最大的预测框作为正例。
(2)笔者实验结果:第一种,ground truth先从9个先验框中确定最接近的先验框,这样可以确定ground truth所属第几个特征图以及第几个box位置,之后根据中心点进一步分配。第二种,全部4032个输出框直接和ground truth计算IOU,取IOU最高的cell分配ground truth。第二种计算方式的IOU数值,往往都比第一种要高,这样wh与xy的loss较小,网络可以更加关注类别和置信度的学习;其次,在推理时,是按照置信度排序,再进行nms筛选,第二种训练方式,每次给ground truth分配的box都是最契合的box,给这样的box置信度打1的标签,更加合理,最接近的box,在推理时更容易被发现。
- Yolov1中的置信度标签,就是预测框与真实框的IOU,Yolov3为什么是1?
(1)置信度意味着该预测框是或者不是一个真实物体,是一个二分类,所以标签是1、0更加合理。
(2)笔者实验结果:第一种:置信度标签取预测框与真实框的IOU;第二种:置信度标签取1。第一种的结果是,在训练时,有些预测框与真实框的IOU极限值就是0.7左右,置信度以0.7作为标签,置信度学习有一些偏差,最后学到的数值是0.5,0.6,那么假设推理时的激活阈值为0.7,这个检测框就被过滤掉了。但是IOU为0.7的预测框,其实已经是比较好的学习样例了。尤其是coco中的小像素物体,几个像素就可能很大程度影响IOU,所以第一种训练方法中,置信度的标签始终很小,无法有效学习,导致检测召回率不高。而检测框趋于收敛,IOU收敛至1,置信度就可以学习到1,这样的设想太过理想化。而使用第二种方法,召回率明显提升了很高。
- 为什么有忽略样例?
(1)忽略样例是Yolov3中的点睛之笔。由于Yolov3使用了多尺度特征图,不同尺度的特征图之间会有重合检测部分。比如有一个真实物体,在训练时被分配到的检测框是特征图1的第三个box,IOU达0.98,此时恰好特征图2的第一个box与该ground truth的IOU达0.95,也检测到了该ground truth,如果此时给其置信度强行打0的标签,网络学习效果会不理想。
代码
qqwweee/keras-yolo3: A Keras implementation of YOLOv3 (Tensorflow backend) (github.com)
参考
【论文解读】Yolo三部曲解读——Yolov3 - 知乎 (zhihu.com)
写给小白的YOLO介绍 - 知乎 (zhihu.com)
YOLO系列详解:YOLOv1、YOLOv2、YOLOv3、YOLOv4、YOLOv5、YOLOv6、YOLOv7_AI追随者的博客-CSDN博客
目标检测评价标准mAP - 知乎 (zhihu.com)
个人工作平台 (datafountain.cn)
yolo系列之yolo v3【深度解析】_yolov3-CSDN博客
从零开始PyTorch项目:YOLO v3目标检测实现 | 机器之心 (jiqizhixin.com)
[从零开始 PyTorch 项目:YOLO v3 目标检测实现(下) | 机器之心 (jiqizhixin.com)](https://www.jiqizhixin.com/articles/042602?from=synced&keyword=从零开始PyTorch项目:YOLO v3目标检测实现)