关于司南导航全系概况模糊学习记录
备注:9月底了,上学期为了学习精确定位和司南823的再开发就对司南公司进行了系统的学习,上学期放假没写完,开学几天了再来做这篇笔记,没有之前的感觉,准确的说不够连贯,不像以往一个不懂问题牵绊着一个不懂知识点往前推进探索的心情。因此,长了个教训,以后做事一定不要托,越拖越没感觉,越拖越没结果,凡事要趁早,一鼓作气。
202209
80%来源于司南官网10%来源于司南导航相关微信公众号10%来源于互联网
202205
最近在学习RTK相关知识,接触到司南导航,就对司南导航全系列产品及其应用展示全面进行了学习,笔记记录如下:
1关于司南
上海司南卫星导航技术股份有限公司成立于2012年(股票代码:833972),2017年进入新三板创新层,是国内自主掌握高精度北斗/GNSS模块核心技术并成功实现规模化市场应用的高新技术企业,集研发、生产、销售、服务为一体,致力于为全球用户提供全方位、多领域的高精度北斗/GNSS芯片、板卡、终端和系统解决方案。
44万台终端交付;120+国家服务;26000m2产业园;员工400+
公司打破国外多项技术壁垒,突破高精度GNSS核心算法、芯片、板卡、终端、应用及产业化等关键技术瓶颈,经业内权威专家鉴定司南高精度GNSS技术达到国际先进水平,相关产品入选国家卫星导航专项北斗基础产品推荐名录。在自主技术和产品支撑下,公司多次承研北斗重大专项、参与国家和上海市卫星导航类科研项目,数次填补国内外高精度GNSS领域的空白。
来源:百度百科、司南导航官网、司南导航技术公众号。
2产品
本章节来源:思南官网、司南公布的各产品使用说明、测绘相关、思南导航技术前线公众号等
2.1GNSS模块
K8系列(K7停产)
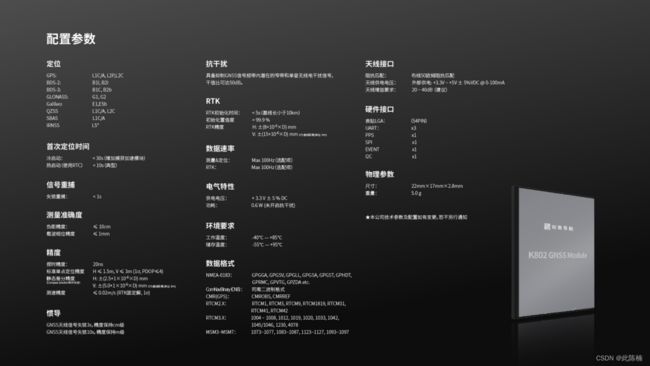
K802、K803、K823模块是公司基于完全自主可控的第三代 SoC 芯片和射频芯片研发的全星座、多频点模块,可并行处理北斗、GPS、GLONASS、Galileo卫星信号,支持北斗三号卫星信号,可轻松实现厘米级定位精度。内置惯导,支持组合导航结算,在复杂环境下也能获取连续、高可靠位置信息,可应用于自动驾驶系统、无人机、数字施工、测量测绘、精准农业等高精度定位、测姿、授时领域。 支持L-Band,单机可实现厘米级定位 50Hz数据更新率 板载惯导,支持组合导航 小尺寸贴片式安装,集成度更高。
(还有个k803lite不再放图)



K823
 K803(参数里面少了定向)
K803(参数里面少了定向)
 K802车规级
K802车规级
2.2GNSS终端
T系列
T50 惯导RTK GNSS接收机
7星30频,续航26小时,支持星基增强服务PPP,无需搭建基站,无需外挂电台,基准站、移动站可切换。OLED液晶显示。

T30高精度定位GNSS接收机
 T300 Plus高精度定位GNSS接收机
T300 Plus高精度定位GNSS接收机
 T300 SE高精度定位GNSS接收机
T300 SE高精度定位GNSS接收机
 T300高精度定位GNSS接收机
T300高精度定位GNSS接收机
 M系列
M系列
M10 mini GNSS 接收机(略)
M900北斗/GNSS导航型接收机(略)机场用
M300 Plus 北斗/GNSS监测型接收机(略)
M10高精度定位便携式GNSS接收机(略)
M600 mini高精度定位定向GNSS接收机(略)
M600高精度定位定向GNSS接收机(略)
M300 Pro北斗/GNSS基准站接收机(略)
M300高精度定位GNSS接收机(略)
M100无人机及车载高精度定位GNSS接收机
 P系列
P系列
P300高精度GNSS车载定位显示终端
专业的车载电脑,经久耐用,基于智能农机装备为行业需求,卫星导航、物联网、计算机、通讯等先进技术研发出的一款集测量、监控、导航于一体的智能化工业平板,可广泛应用于精准农业、智能驾考驾培、工程机械定位控制等行业。支持多种软件、多任务同时运行

A系列
A100高精度定位GNSS接收机
针对农机自动驾驶应用自主研发的新一代高精度一体化GNSS接收机,内置天线设计和单接口设计,使得结构轻便小巧、便于安装、拆卸,精准农业、机械控制、高精度车载定位、系统集成等行业

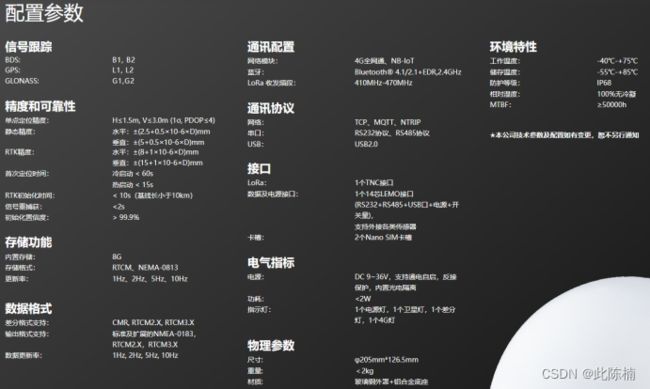
A300高精度定位GNSS接收机
低功耗,融合MEMS传感器技术、窄带通信技术,应用于野外地质灾害,广泛应用于地灾监测、矿山监测、水利安全、国土资源等领域。实时监测隐患点变化,每秒快速预警,防水防尘。

 G系列
G系列
G100可穿戴式高精度定位GNSS接收机(略)
G200可穿戴高精度定位GNSS接收机
野外作业环境,可更换电池,可通过蓝牙、串口与各类平板电脑、工业数据采集器、智能手机等产品配合使用

N系列
N3 惯导RTK GNSS接收机(略)
N3 惯导RTK GNSS接收机(略)
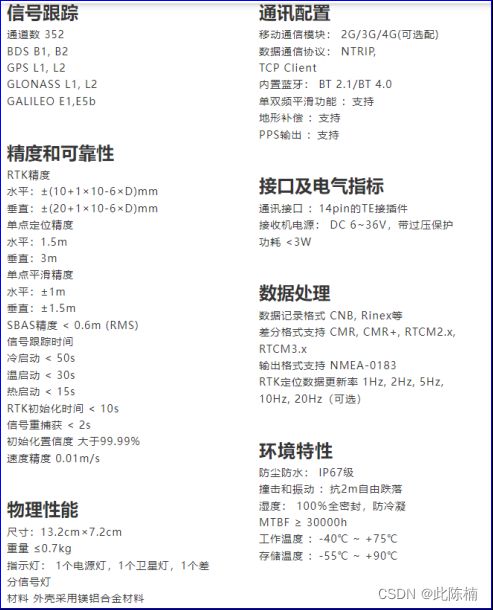
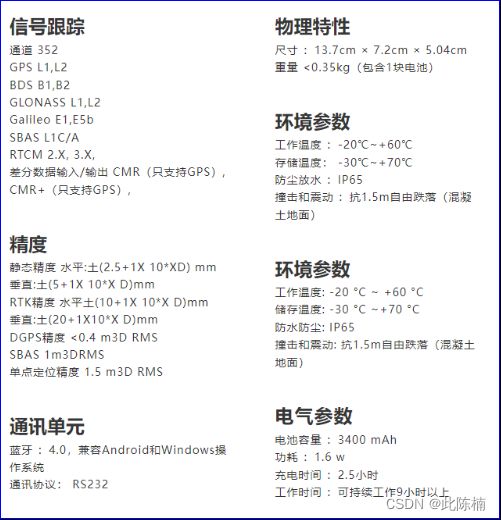
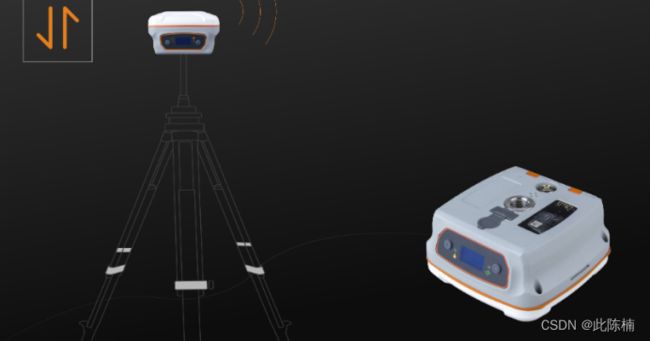
N6 惯导RTK GNSS接收机
K8模块,收发一体,支持数据链、网络发射和接收,兼容业内主流各类协议/RTK,随测随用,无需看气泡,抗杆在肩,“点”到即测,保持厘米级精度,测量放样效率上升,单手握持,能放进口袋。
 R系列
R系列
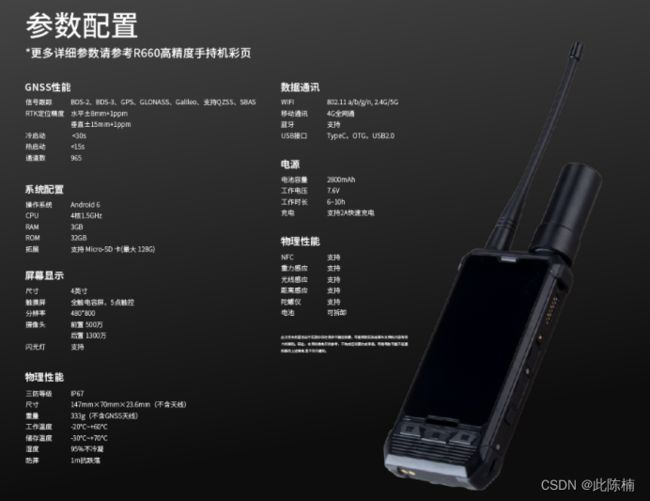
R660 高精度手持机
针对空间数据采集、巡查巡护等场景研发的一款高精度定位手持机,业内为首款配备DMR硬件对讲功能,配备全系统多频四臂螺旋天线,广泛应用于国土、电力、林业、环保、公路、铁路、船舶监控、石油燃气管道、矿界勘察等行业。手机大小,单手可握,2800mAh可拆卸电池,2A快充,k803平台板卡,安卓6.0,4G全网通,4 寸高清全触电容屏
鲁班系列
LU1-激光RTK
手持式纯网络接收机,多模多频的RTK算法,支持多系统多频点导航卫星系统信号的接收及结算定位。K8平台,激光放样,有惯导免对中,NFC闪连,PPP星级差分单机也能达到厘米。


Lu2-掌上RTK
定制三合一天线,薄至48mm,轻至650g,小巧便携,轻盈灵动,薄动心弦,15km收发电台,K8平台,内置cors,秒开cad,nfc,ppp


2.3GNSS天线
AT340 测量型北斗天线
 AT500 扼流圈天线
AT500 扼流圈天线

2.4数据传输模块
U70数传模块(LoRa)
采用LoRa协议,可实现超长工作距离和较低功耗,接收仅0.2W,输出功率2W,传输距离可高达10km。


U30数传模块

CDL7 大功率数据链(野外实时数据传输) CDL5智能收发一体中继数据链
CDL5智能收发一体中继数据链

2.5GNSS手薄
R60 GNSS-RTK测量手簿

R550 GNSS-RTK测量手簿

R500 GNSS测量手簿

2.6农机导航
AG360&AG360 Pro北斗GNSS农机自动导航驾驶系统
AG360 是集卫星接收、定位导航、自动驾驶于一体的综合性系统,主要由智能平板、多功能方向盘、力矩电机、双天线一体机、角度传感器等部分组成。可自由驰骋于野外严苛环境,全地形、全功能、全适配,直线曲线穿梭自如,能切实解决耕不直、成本大、耗时久等问题。该系统还可广泛用于起垄、犁地、打药、播种等各个环节的农业作业。

AG302 BD-2.5GD北斗GNSS农业自动导航驾驶系统
AG302BD-2.5GD北斗/GNSS农业自动导航驾驶系统安装在大型拖拉机后,通过卫星导航使拖拉机在田间可以按照设定的标准进行驾驶作业,从而使农作物的种植布局规则、整齐,提高种植产量,解决人工操作过程中出现的交接行不齐,甚至重叠等问题。该系统已广泛应用于整地、起垄、播种、施肥、植保、收割等农机作业中。

AG610 BD-2.5GY北斗GNSS农业自动导航驾驶系统
AG610是集卫星接收、定位定向、控制于一体的综合性系统。农业生产者可根据位置传感器设计好的行走路线,控制拖拉机的转向机构,从而驱动拖拉机进行农业耕作。该系统主要由ECU控制器、P300显示器、高精度北斗/GNSS接收机、GNSS天线、角度传感器和液压阀等部分组成。已广泛运用于翻地、耙地、旋耕、起垄、播种、喷药、收获等环节的农业作业中。

AG600拖拉机自动驾驶液压系统
AG600是集卫星接收、定位、控制于一体的综合性系统,主要由卫星天线、车载计算机、控制器、液压阀、角度传感器等部分组成。AG600根据导航系统设计好的行走路线,操作控制拖拉机的转向机构(转向阀),驱动拖拉机进行农业耕作,如翻地、耙地、旋耕、起垄、播种、喷药、收获等各个环节的农业作业

2.7数字施工
X100推土机数字化作业引导系统
上海司南卫星导航自主研发生产的一款专业用于推土机施工作业的引导系统,系统采用北斗高精度定位、组合导航和倾角传感器等技术,精准计算作业区域的作业面积、土方量、目标高程,实时获取铲刀的三位态势,精准引导驾驶员进行推土作业。相比传统施工-检验-返工-验收的作业模式,可实现施工完成即验收通过,作业效率大大提升,作业质量更有保障。



2.8无人机
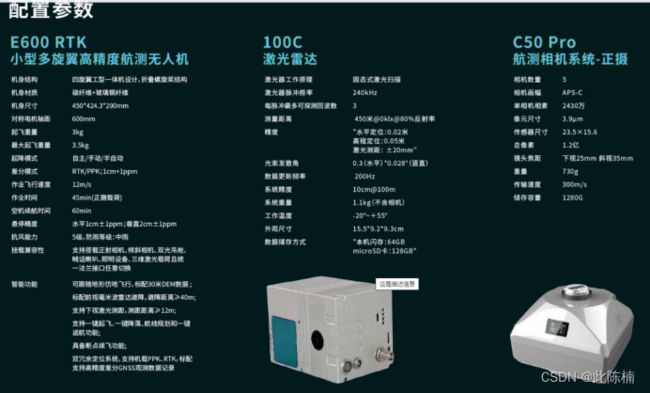
E600 RTK小型多旋翼高精度航测无人机
小型多旋翼高精度航测无人机,采用双冗余定位系统,支持机载PPK、RTK,标配支持高精度差分GNSS观测数据记录,将厘米级定位与高性能成像系统集成在小巧便携的机身上,可广泛应用于地形图测绘、土方矿山测量、应急测绘、房地一体等领域。

3专业软件
本章节来源:思南官网、司南公布的各软件用户手册、视频资料、知乎、cors账号网、CSDN博客等
3.1CDMonitor(变形监测数据处理软件)
CDMonitor_V1.6.1_软件用户手册、CDMonitor V1.6.1版本发布日志
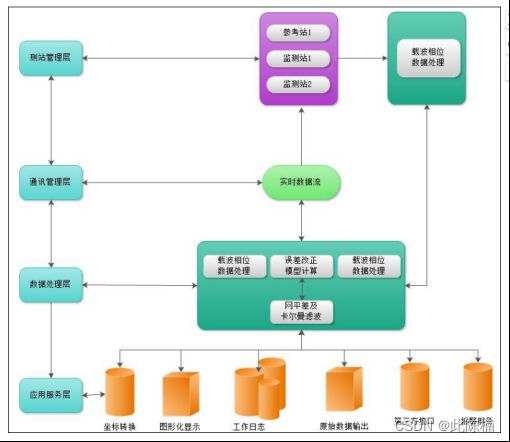
高精度实时差分变形监测应用研制的专用软件,C/S和B/S混合架构,解算精度可达毫米级。通过网络或串口(RS232)获得GNSS的原始数据(载波相位和伪距),进行差分处理和滤波,并根据系统设置,实现图形显示、数据记录存储、坐标结果输出。同时,软件还提供了一个远程组件,方便用户的二次开发。7×24 小时实时差分处理
由三部分组成:监测单元、数据传输和控制单元、数据处理分析及管理单元。
C++程序编写
CDM软件主要功能有:
√支持多站点大数据量同时接入,能够处理多基站+多监测站数据;
√支持多种数据接入协议,包括RS232串口、网络TCP/IP及UDP协议;
√ 支持多种数据输出接口:包括TCP/IP、文件存储、数据库支持;
√ 支持多系统、多频点数据处理,包括BDS、GPS、GLONASS,预留对Galileo的升级支持;
√支持根据项目情况设置解算模型,包括静态解算模型、动态解算模型;
√实时显示基线、点位坐标的变化情况等,软件包括如下视图:实时数据视图、实时网图、趋势图、卫星视图、三维视图、数据管理;
通讯传输、数据解码、误差改正、滤波解算、数据输出等模块。

采用了当前最先进的 GNSS 算法—卡尔曼滤波三差解,解决了 RTK 算法必须求解整周模糊度而带来的相关局限性。如环境变化、 电磁干扰、卫星阻挡及时间不同步等。软件将原来在接收机内进行解算的工作移植到性能更高、 速度更快、更稳定的计算机上来进行。系。
安装软件需要visual c++环境和virbox许可证服务。(完成后程序自动弹出 Polaris4.dll、Polaris5.dll、DatumManager.ocx 系统库的注册弹框。),插上 CDMonitor 软件狗,打开加密狗服务。本地和服务端模式均需要插入配套硬件狗,本地模式仅限 1 台电脑使用,服务端模式 可项多台设备提供许可服务。客户端模式不许要硬件狗,需接入许可服务信息,如 IP 端口等。
备注:写这篇笔记的时候,未获取软件许可,故无法截图演示每一步操作。联系了客服,客服登记了我的信息,后续可能有技术人员指导帮助,
后续客服给了一个技术人员,这个许可需要买,在买设备营销那里购买。
建立工程项目
坐标参数设置:默认 WGS84 坐标,故常规坐标参数设置主要设置中央子午线设置。点击菜单栏 Tools,选择 Datum Manager。可选择预设或者新增需要坐标系,软件预设坐标 系包含西安 80、北京 54 等;Add、Modify、Delete 分别是添加坐标系、 修改坐标系、删除坐标系,可以添加、修改椭球、参数等。然后再设置为投影显示模式 Projective Display Mode,可将投影结果作用于结果文件中
建立测站
很简单这一步,和其他客户端一样配置基准站和移动站。
BLH 坐标:若基站坐标未填写,软件会先进行单点定位并将结果填入相应位置;移动站 坐标会根据基线解结果实时更新到监测站坐标位置;
基线解算设置
静态解算设置:静态解算使用场景一般在监测点位移变化缓慢的项目,左框图中的“Baselines”,选中一条基线单击 Property 进行静态基线设置。选择匹配的基站、解算策略、设置历元采集间隔(采样率)、设置基线解算的时段长度;平滑时长设置,支持 No Smooth 不设置平滑以及 1min~12h 时长平滑 设置,软件自动将设置的平滑时间段内解结果进行平均,并依次输出平均后的结果。左侧点击小框内的baselines显示已设置信息。
动态解算设置:般用于监测点位移变化较大的项目。设置类同静态。
数据存储
可将解算结果、接收原始观测量数据进行保存。菜单栏“Tools”选择“Export Setup”进入数据存储设置
存储文件名命名规则:H01-S0-站点名_R.数据类型。H开始时间、R/B 分别监测站和基站;
基线解算坐标成果.csv、基线解算坐标结果文件 txt、原始观测数据 cnb 与 rtcm。
数据服务设置
目解算结果可通过本地保存查看,也可通过 TCP Server 方式播发。Tools打开 Option 界面,对 TCP 结果服务进行配置,设置 IP 和端口、闰秒及时间系统等信息。
星历表Ephemeris
【Project】→【Service】,打开远程连接服务。
左侧Station显示所设置的各个测站的具体信息,点击指定的可查看这个的具体搜星情况。
数据后处理
参考站,后处理时,选择 TCP Client 模式,IP 和端口设置为192.168.2.175:3002,IP 为本机 IP。
监测站,后处理时,选择TCP Client模式,IP和端口设置为192.168.2.175:3002, IP 为本机 IP。
建好项目,菜单栏 Tools 选择【Process】→【Post Process】,打开 CDM post transfer 界面。然后依次导入两个站点数据(观测量+星历)
Address】选择本机 IP。 【Port Start】设置起始端口,后续站点端口依次加 1,如图 3002 等。 【Epoch Speed】设置历元播放速度,若需要加快可将时间设置小,默认 1s,设置最小限 值需要评估电脑性能。 【Add File】添加站点文件,IP 端口对应。 【Delete File】→【Add Obs.File】添加观测文件。 【Start】开始后处理。 【Stop】停止后处理。
3.2CDC.NET(GNSS地基增强服务系统)
(山东cors貌似就是用的司南的这个)
 为满足省级CORS系统的解算和服务需要,自主研发的一款GNSS网络增强服务系统。该软件采用成熟稳定的网络RTK算法,优化GNSS数据逻辑处理流程,提升高负载条件下的计算机运算效率,可提供格网化差分服务,实现规模化系统应用,以满足专业用户、行业应用等不同需求。
为满足省级CORS系统的解算和服务需要,自主研发的一款GNSS网络增强服务系统。该软件采用成熟稳定的网络RTK算法,优化GNSS数据逻辑处理流程,提升高负载条件下的计算机运算效率,可提供格网化差分服务,实现规模化系统应用,以满足专业用户、行业应用等不同需求。
引入高级消息队列协议(AMQP)总线技术。最新版本CDC.NET_1.8.6,是整个 CORS 系统的核心,承担的是数据存储、 数据分析纠错、数据处理、数据服务发播的任务。同时 软件在基站数据的粗差处理、周跳探测、整网数据的解算,电离层延迟、对流层延迟、轨道 误差、多路径效应、接收机内部各项偏差等误差建模解算等关键技术上实现突破,软件的定 位精度和可靠性达到了国内领先的水平。
其他参考《CDC.NET 软件设计方案》 《CDC.NET 软件需求规范》 《CDC.NET 数据库设计文档》
有基站坐标位移监测,天线类型、坐标等信息匹配状态预警。
交互采取标准 NTRIP 协议,也支持其他类型 TCP/IP 协议,采用开源数据库 MySQ
安装 MySQL 数据库,端口设置;账户密码。
安装 CDC.NET。
需要注册码
数据库设置,精密星历下载,基站设置与修改。可以查看任意基站的卫星星空图和各系统卫星号和频点,可以查看任意基站的卫星详细信息,可以查看任意基站的各系统卫星的完整率数据,健康图表。
定位模式分为 VRS、NEAREST、RTD、SRTK、GRID 五种模式。VRS:在移 动站附近虚拟参考站做基站播发差分数据;NEAREST:选取最近基站播发差分数据;RTD:伪 距差分模式;SRTK:任意选取单基站做 RTK;GRID:格网功能,单个网格内的用户统一使用 同一虚拟基站,减轻系统运算压力,可满足高并发量需求。
有坐标转换窗口。有围栏设置
用户管理:添加修改期限位置等其他信息,可显示用户轨迹
系统内点击星历可以查看所有基站共用的导航星历和精密星历(查看精 密星历的前提是进行了 SP3 设置,具体过程查看 3.2.2),如图 5-60 所示,点击控制可以查看 电脑的运行内存、CPU 和各个硬盘内存占用情况。
3.3CDC+(GNSS数据转发系统)
Compass Data Center Plus,是一款多基站差分数据网络转发软件,可作为实时GNSS高精度定位基础框架平台,如CORS、PPP-RTK、实时精密轨道钟差、形变监测等。
采用C/S模式,支持转发、数据报分析、用户测绘成果管理等服务功能。该软件支持跨平台,采用后台、前端、监管端(Andirod )分布式部署,为超级并发预留空间;且具备处理海量数据环境下的大并发能力,满足测绘及其他更多市场需求。
使用原理:基站用户通过NTRIP协议向CDC+上传差分数据,移动站用户通过NTRIP协议连接CDC+,移动站用户通过基站名称与对应基站绑定,CDC+将此基站上传的差分数据传发给此移动点。
功能特点:
1.多用户实时通过Ntrip协议转发差分数据;
2.前端界面显示与后台服务分开设计,有效提高软件运行稳定性;
3.上线设备位置信息实时地图显示;
4.丰富的用户权限设计,可支持其他终端(非安装服务器)登陆查看接收机上线信息;
5.软件运行用户并发量值达到3000+。
环境搭建服务的安装与配置客户端的操作过程
服务端+客户端
 服务端打不开,客户端能打开,也是需要购买注册账号的。
服务端打不开,客户端能打开,也是需要购买注册账号的。
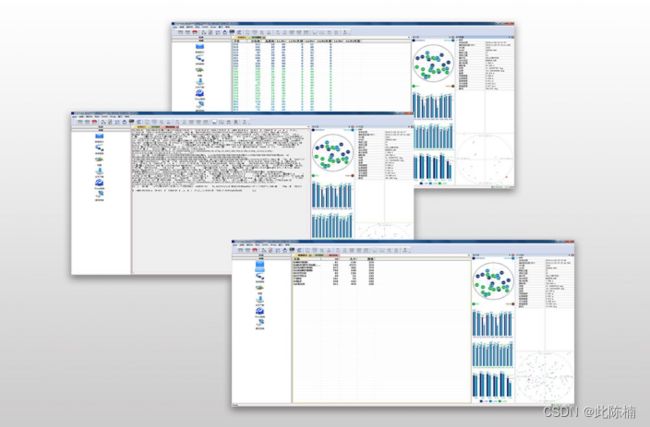
3.4Compass Solution (GNSS数据后处理软件)
一款GNSS静动态后处理软件,用于行业内GNSS数据的后处理分析工作。既可支持单卫星系统的数据处理,单独处理北斗B1\B2\B3 数据,也可支持GPS\BDS\GLONASS\ Galilean 多模多频联合解算。
该软件能够处理静态观测数据,包含对零基线、短基线、中长基线、长基线的解算。并且能够依据基线的计算结果,进一步进行静态基线控制网的平差工作。
支持司南导航所有的板卡及接收机数据处理,同时兼容其他厂家的 RINEX 数据和RTCM 数据。
专业版和简易版
Report:用于存放网平差、闭合环、动态基线解算、观测数据分析、静态基线解算等成果报告;
Rinex:用于存放由观测文件转换成的 Rinex 文件;
***.cps:已经建立的任务文件;
***.log:当前任务工程的日志文件。
项目建完后,需要加载 GNSS 观测数据文件,用作基线解算。执行[项目相关]→[导入数据]。在详细解算结果界面,鼠标右键单击动态基线-[基线报告],可以将解算的每个历元的结果导出到为 Excel 格式,可以去 Report\Dynamic Baseline
含有非 RINEX 格式文件转换为标准格式 RINEX 文件,
默认使用模糊度固定的静态解算的方式,可根据当前基线处理结果选择合适
的解算方案。一般情况,此项参数更改的可能性很小。下面介绍一些特殊情况使
用场景。
使用伪距进行解算。针对静态基线计算不好,且载波观测值可能异常的情况。允许部分模糊度固定。对静态基线生效,默认开启,自适应较差数据,一般不作更改。
检测钟差。对动态基线生效。一般用于解算结果较差,大多数历元无法固定,为浮点解的情况,且数据含有较大钟差。钟差查看可参考章节 4.5.6 观测文件属性,一般钟差在 1E-7 秒这个数量级。因为检测钟差耗时较多,所以开启此参数一般会使基线解算时长扩大 2-3 倍。
解算结果校验。对动态基线生效。一般用于解算结果含飞点的情况。开启此参数会增加运算量,只在出现异常时选择使用。
注意:高级页面亦不保证在满足相应条件时,一定是最优解,只是提供用户更多的选择,去面对一些特殊的场景。
GNSS 全称为:Global Navigation Satellite System,中文为:全球导航卫星系统定位,是利用一组卫星的伪距、星历、卫星发射时间等观测量,同时还必须知 道用户钟差。全球导航卫星系统是能在地球表面或近地空间的任何地点为用户提 供全天候的 3 维坐标和速度以及时间信息的空基无线电导航定位系统。因此,通俗一点说如果你除了要知道经纬度还想知道高度的话,那么,必须对收到 4 颗卫星才能准确定位。
GPS 的定位方法,若按用户接收机天线在测量中所处的状态来分,可分为静态定位和动态定位;若按定位的结果来分,可分为绝对定位和相对定位。
静态定位,即在定位过程中,接收机天线(观测站)的位置相对于周围地面点而言,处于静止状态;而动态定位则正好相反,即在定位过程中,接收机天线处于运动状态,定位结果是连续变化的。
绝对定位亦称单点定位,是利用 GPS 独立确定用户接收机天线(观测站)在WGS-84 坐标系中的绝对位置。相对定位则是在 WGS-84 坐标系中确定收机天线(观测站)与某一地面参考点之间的相对位置,或两观测站之间相对位置的方法。
各种定位方法还可有不同的组合,如静态绝对定位、静态相对定位、动态绝对定位、动态相对定位等。目前工程、测绘领域,应用最广泛的是静态相对定位和动态相对定位。
按相对定位的数据解算,是否具有实时性,又可将其分为后处理定位和实时动态定位( RTK ),其中,后处理定位又可分为静态(相对)定位和动态(相对)定位。
3.5CRU(串口调试控制软件)
Compass Receiver Utility软件简称CRU软件,是一款全面专业的串口调试控制软件。该软件具备调试设置GNSS板卡接收机指令、设置文件内存数据的文件配置及下载、实时信噪比及星空图的直观显示、数据文件格式转化等功能,功能全面操作简单。
 功能特点:
功能特点:
1.GNSS板卡及接收机的设置,数据记录、高度截止角、采样间隔、文件记录方式等;
2.本机或远程板卡及接收机内数据下载、文件重命名(时段、属性、天线高)、文件删除、格式化内存等;
3.卫星跟踪情况如:信噪比的查看(数值和柱状图显示)、星空图、定位离散图、各种定位信息显示等;
4.串口调试模拟,可根据需要发送各种板卡命令进行设置或数据输出等等;
5.RINEX数据转换,可根据需要转换出单频、多频数据及相应版本的RINEX格式数据。
3.6UarTerm(串口工具)
UarTerm V1.1.0软件也称RS232软件,是一款简单好用的串口调试控制软件。软件自带GNSS板卡常用指令,可快速配置GNSS板卡接收机,亦可手动对板卡进行配置。
3.7测量大师 (测绘APP for Android)
测量大师(Survey Master)是司南导航为行业测量用户倾心打造的一款基于 Android 平台的手簿软件。集普通测量,点,线放样及道路放样;支持多语言切换; 参数配置多样,界面简洁美观易操作,功能全面,多种数据格式兼容及报告输出,并可将配置信息方便的通过二维码,邮件,点对点免流量互发,也可通过司南导航云进行数据备份与多端同步,让您数据安全无忧,云端后处理,远程技术支持, 为您带来更简洁、更专业、更高效的测量新体验!


产品特点:(功能非常强大,外出带个pad就可了)
野外数据采集、兼容多种智能终端。
基于安卓系统开发,设计简约,操作简单。
支持向导功能,轻松调查工作流程。
实时访问开放的街道地图,实时跟踪设备运行情况。
通过Cloud Service收集用户反馈,支持状态栏显示,实时跟踪信息收集。
告别繁琐,一键式启动与数据导入导出。
可运行设备多样,如智能手机、平板和专业手簿
下载地址:
https://apps.sinognss.com/console/#/store/apps/details?appid=com.sinognss.sm.free
3.8导航云-设备管理系统
司南导航基于物联网、大数据、云计算技术打造的一个服务平台,实现云端、软件终端和硬件终端之间的互联互通。首发版本实现了三大基础服务(用户管理、设备管理和文件管理)及测量应用子系统。

司南云平台支持GNSS硬件设备自检、远程获取终端设备信息、远程协助用户解决问题;支持在线地图显示设备位置及作业成果数据;支持作业数据同步、任务下发和作业协调。单位+角色的双层权限控制,使得在数据安全的情况下,又能最大限度地让用户分享作业成果。
产品特点:
内外业相互协同,数据实时同步;
云上终端相互赋能,提高作业效率;
作业可全程监控,管理决策有数据依据;
任务、位置、进度、实况等在线实时显示;
支持团队分工协助,支持作业数据团队共享;
支持团队人员、设备和数据独立管理。
导航云
https://cloud.sinognss.com/#/product/mainPage
用户手册:
https://v1.cecdn.yun300.cn/100001_1905105081/%E5%AF%BC%E8%88%AA%E4%BA%91%E7%94%A8%E6%88%B7%E6%89%8B%E5%86%8CV1.2.pdf
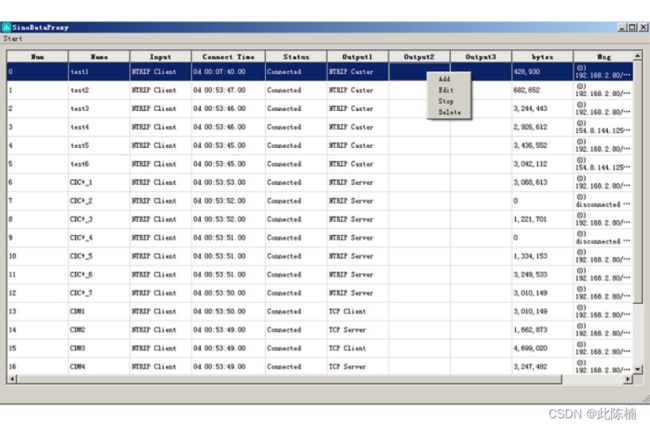
3.9SinoDataProxy 数据转发工具使用说明
行数据转发的集成工具,它支持通过Ntrip、TCP、串口、文件读取、FTP、HTTP等多种方式进行数据的接收和转发,并且支持对多个同时并发运行的转发数据流的管理及监控功能。该款软件有Windows版和LINUX版本,可以分别在不同的平台上运行。
3.10导航大师

导航大师是上海司南卫星导航技术股份有限公司基于Android平台开发的一款导航型多功能软件。可以通过蓝牙对相关的GNSS接收机进行快速的信息查看、参数配置和数据传输和存储。目前兼容M10 GNSS接收机、M10mini GNSS接收机、A300 GNSS接收机等。
主要功能:
①对相关GNSS接收机进行信息查看;
②无设备网络时,也可以通过手机网络传输数据;
③可通过TCP/MQTT/NTRIP等协议传输数据;
④可将数据存储在手机本地,随时查看、分析;
⑤通过软件对板卡发指令;
⑥通过软件对接收机进行重启和恢复出厂设置;
⑦农业的采点、找点、AB线采集、面积测量等功能。
产品特点:
1. 基于Android系统,蓝牙连接,一键启动;
2.支持快速配置,状态查看,适配多种产品;
3.助力农业生产,支持打点寻桩、面积测量等;
4.支持地图查看,实时显示;
5.支持随时随地远程配置查看,支持远程监控设备;
6.助力监测,支持远程位移监控预警;
7.方便便捷,无需其他辅助,只需一部安卓手机。
4解决方案与应用案列
本章节来源:思南官网、思南导航技术前线公众号。
4.1测量测绘
工程施工放样
工程放样是测量的一个应用分支,它要求通过一定方法采用一定仪器把人为设计好的点位在实地给标定出来,过去采用常规的放样方法很多,如经纬仪交会放样,全站仪的边角放样等等,一般要放样出一个设计点的点位时,往往需要来回移动目标,而且要2-3人操作,同时在放样过程中还要求点间通视情况良好,在生产应用上效率不是很高,有时放样中遇到困难的情况会借助于很多方法才能放样。
仅需把设计好的点位坐标输入到R550手簿中,背着GNSS接收机,它会提醒你走到要放样点的位置,既迅速又方便,由于GNSS接收机是通过坐标来直接放样的,而且精度很高也很均匀,因而在外业放样中效率会大大提高,且只需一个人操作。目前主流GNSS接收机都已经有点放样、线放样、曲线放样、CAD放样和道路放样,多种工作模式满足各种测量放样要求。
GNSS控制网布设
静态数据采集、静态数据后处理。静态观测数据质量高;CS后处理软件支持多星系统数据结算;后处理解算速度快,软件智能分析处理解算,人工干预少。
土方测量应用、地形图测量、GIS地理信息系统、市政测量
测量大师软件可以新建代码,点、线、面会以不同的颜色或样式显示出来。使用图形作业功能,直接测量地物,实时成图,效率高。
4.2精准农业
提高作业效率,解放劳动力、确保作业品质,加快农业现代化进程,改善农业生产经营条件,不断提高农业的生产技术水平和经济效益、生态效益。用于起垄、犁地、打药、播种等各个环节的农业作业,促进农业和农村经济持续、快速、健康发展。

4.3变形监测
矿山安全监测系统、地质灾害监测系统、高层建筑变形监测、水利安全监测解决方案、桥梁安全监测解决方案
4.4无人系统
机器人(户外巡检,安防,农业割草)、无人驾驶(全局路径规划、智能泊车)、无人机。
4.5数字施工
船舶作业高精度定位解决方案、智能压实系统解决方案、高精度桩机智能引导系统
4.6地基增强
地基增强解决方案、电力在线监测系统
4.7人员定位
人员定位解决方案
M10 mini内部高度集成小型化、低功耗模块。


4.8智慧机场
机场车辆定位解决方案
通过安装在车辆顶部的GNSS天线和车辆内部的M900高精度定位接收机,连接CORS服务差分后,M900高精度定位接收机即可输出当前天线的厘米级经纬度和车辆姿态信息。不同车辆上的M900接收机通过4G/5G通讯,将各自车辆位置信息回传到车辆管理平台,此时平台端即可显示目前所有车辆的位置信息及动态轨迹。管理人员即可通过平台端进行路线规划,指令下发和车辆管理等,实时掌握所有车辆动态信息,防止车辆发生碰撞事故。
5其它
下载中心
行业应用
https://www.sinognss.com/apply.html
常见问题 技术文章 公司新闻
常见问题_司南资讯_司南导航_精准定位服务数字时代
视频中心
司南导航_精准定位服务数字时代
司南caster 154.8.144.125/8888
备注:
与此同时也在学习了解了其他的软件和公司,例如a.Back 40 Precision https://www.back40precision.com/
b.Lefebure NTRIP Caster for FlexPak7
c.BKG NTRIP Caster / BKG Ntrip Client (BNC)是BKG 提供的免费产品一个具有许多功能的综合工具http: //igs.bkg.bund.de/ntrip/download(国内不可访问)
d.RTKLIB由Tomoji Takasu开发的开源 RTK 工具(一些工具包含客户端)http://rtklib.com/
(内有小工具STRSVR(网络互互传工具)是一款非常优秀好用的支持串口、FTP 、 HTTP、 TCP客户端/服务器模式、文件、NTRIP协议的网络互传辅助工具。这款STRSVR软件功能强大全面,简单易用,使用后可以帮助用户更轻松便捷的进行服务器互传操作。和SinoDataProxy功能类似 )
e.NtripClient由Dirk Stoecker Alberding GmbH提供的免费 https ://www.dstoecker.eu/
f. Ntrip Version 2.0 Command Line Client由Dirk Stoecker Alberding GmbH提供的免费产品http://igs.bkg.bund.de/root_ftp/NTRIP/software/ntripclient.exe
或http://igs.bkg.bund.de/root_ftp/NTRIP/software/ntripclient.zip 或https://software.rtcm-ntrip.org获 C 源码。
g. GnssSurfer 是Juergen Siebert提供的免费 PC 产品 ,SAPOS参见网站:http: //217.9.43.196/Download/GnssSurferV1.10.zip
h.SXBlue RTN是Geneq Inc.提供的 WinCE 免费客户端。http ://www.sxbluegps.com/download/
i.GNSS Internet Radio 是BKG 提供的一种较旧的(免费)Window GUI 产品,它在所有这一切(在创造 NTRIP 术语之前)有点像祖父,并且这些天不再更新,但源代码是一个很好的起点和为了完整起见,我们将其包括在内。这是一个描述它的自述页面。该工具不再由 BKG 分发(因为其他工具已经克服了它),但您可以找到一些镜像链接。这是 美国测量师的一堂重要的历史课,也提到了这一点。
J.千寻位置
K.六分科技
L.司南CDC+(GNSS数据转发系统)
M.各省CORS系统都有一个NTRIP Caster软件,比如天宝的VRS3Net、徕卡的GPS Spider等
N. RTK差分共享猫、p系列软件。(天津一个家伙写的)
O.星网宇达sc3661设备
Gmap山东科技大学博士根基rtklib改写的PPP定位软件
GAMIT/GLOBK/GIPSY著名的GPS数据处理软件介绍
P.澳大利亚AUSCORS NTRIP Broadcaster
Q.AgriBus-Caster 日本一般农业拖拉机用
R.u-center 做评估evk套件的公司,u-blox研发的测评软件(可以做数据的转发及其获取)https://www.u-blox.com/en/product/u-center
S.NTRIPSHARE BY MR.PENG http://www.ntripshare.com/index.html#testimonials(天津一前辈业余开发)。
就技术而言,司南功能没有特别突出的地方,结合司南的发展历程,作为中国新时代发展的产物,司南发展的历程给我一种“时间紧任务重”的感觉,研发步步推进,新技术不断融于,应用方向持续开拓,发展就国内而言可谓迅速。我个人赞扬且钦佩这种企业!
非常喜欢的一句话:卫星导航应用只受人类想象力的限制,目前北斗应用只是冰山一角,未来仍需大家一起开拓。
北斗的应用来自于你的想象力!!!
完结撒花