计算机视觉基础-形态学滤波
Task07 OpenCV框架实现形态学滤波
- 一、前言
- 二、形态学概述
- 三、基本形态学操作
-
- 3.1腐蚀
- 3.2膨胀
- 四、高级形态学操作
-
- 4.1开闭运算
- 4.2形态学梯度
- 4.3黑帽顶帽
- 五、基于OpenCV的C++代码实现
一、前言
图像形态学滤波是图像滤波的一个重要分支,与之前介绍过的空间域滤波(方框滤波、高斯滤波、中值滤波)以及图像边缘提取过程中的滤波相同的是,他们都是通过滤波算子掩膜计算图像(中心)像素点的过程,不同的是滤波算子(内核)和计算方式,概括如下:
- 形态学滤波:采用结构元素(Structure element)作为内核,中心像素是通过内核区域集合运算得到的。
- 空域平滑、锐化滤波:采用卷积元素(Convolution element)作为内核,中心像素通过内核区域算数运算(有积分、微分等)得到的。
总体来说,图像的形态学操作是基于形状的一系列图像处理操作,在OpenCV中对图像的形态学变换提供了方便快捷的函数,包括基本形态学操作和高级形态学操作。
二、形态学概述
图像形态学,也叫做数学形态学(Mathematical morphology) 是一门建立在格论和拓扑学基础之上的图像分析学科,是数学形态学图像处理的基本理论,在图像处理中占有相当重要的地位。
在图像处理中,对于图像形态学的应用相当的广泛,主要应用在对于图像的预处理操作当中,尤其是在对二值图像的预处理和分析方面。
结构元素
形态学滤波最主要特征在集合运算,而集合运算是通过由0/1组成的不同形态的结构元素实现的,首先明确结构元素的概念:
结构元素是由元素为1或者0的矩阵组成,结构元素为1的区域定义了图像的邻域,领域内的像素在进行态学操作时要进行考虑。一般来说,二维或者平面结构的结构元素要比处理的图像小得多。结构元素的中心像素,即结构元素的原点,与输入图像中感兴趣的像素值(即要处理的像素值)相对应。
OpenCV中获取结构元素的函数为getStructuringElement,原型为:
Mat getStructuringElement(int shape, //内核的形状
Size esize, //内核的尺寸
Point anchor = Point(-1, -1) //锚点的位置 )
内核的形状,有三种形状可以选择。
- 矩形:MORPH_RECT;
- 交叉形:MORPH_CROSS;
- 椭圆形:MORPH_ELLIPSE;
三、基本形态学操作
基本形态学操作有腐蚀和膨胀,在腐蚀和膨胀上面通过不同运算方式可得到高级形态学操作,其主要作用有:
- 消除噪声(低尺寸结构元素的腐蚀操作很容易去掉分散的椒盐噪声点)
- 分割出独立的图像元素(腐蚀),在图像中连接相邻的元素(膨胀)
- 寻找图像中明显的极大值区域或极小值区域
- 求出图像的梯度
- 图像轮廓提取、图像分割、寻找图像中的明显的极大值区域或极小值区域等
【注】:OpenCV里面的腐蚀和膨胀操作是针对白色目标区域的
3.1腐蚀
腐蚀:用结构元素的中心点对准当前正在遍历的这个像素,然后取当前结构元素所覆盖下的原图对应区域内的所有像素的最小值,用这个最小值替换当前像素值,删除对象边界的某些像素,使二值图像减小一圈
腐蚀是一种最小值滤波,即用结构元素内的最小值去替换锚点的像素值,具体操作为:
-
用结构元素,扫描图像的每一个像素
-
用结构元素与其覆盖的二值图像做 “与”操作
-
如果都为1,结果图像的该像素为1。否则为0,也就是查找被处理图像中能不能找到和结构元素相同的矩阵。如果存在那么中心点所对应的点就为1,否则为0
简单来说,就是腐蚀图像白色边缘(像素值为1)缩小一圈,图示如下:

若图中原始图像边界点像素为src(x,y),采用结构元素element(x’,y’)处理后得到dst(x,y),公式表述为:
d s t ( x , y ) = m a x ( x ′ , y ′ ) : e l e m e n t ( x ′ , y ′ ) ≠ 0 s r c ( x + x ′ , y + y ′ ) dst(x,y)=\underset{(x',y'):element(x',y')\neq 0}{max}src(x+x',y+y') dst(x,y)=(x′,y′):element(x′,y′)=0maxsrc(x+x′,y+y′)
在OpenCV中进行腐蚀操作可以采用函数erode(),或者采用morphologyEx() 函数并输出需要进行的形态学操作类型。如下为erode()函数原型:
void erode(InputArray src, //原始图像
OutputArray dst, //目标图像,和源图片有一样的尺寸和类型
InputArray kernel, //内核,可以使用getStructuringElement来创建结构元素
Point anchor=Point(-1,-1), //锚点的位置,其有默认值(-1,-1),表示锚位于中心
int iterations=1, //迭代使用该函数的次数,默认值为1
int borderType=BORDER_CONSTANT, //用于推断图像外部像素的某种边界模式,默认值BORDER_DEFAULT
const Scalar& borderValue=morphologyDefaultBorderValue() //当边界为常数时的边界值,有默认值morphologyDefaultBorderValue(),
)
3.2膨胀
膨胀:用结构元素的中心点对准当前正在遍历的这个像素,然后取当前结构元素所覆盖下的原图对应区域内的所有像素的最大值,用这个最大值替换当前像素值,给图像中的对象边界添加像素,使图像扩大一圈
膨胀是一种最大值滤波,即用结构元素内的最大值去替换锚点的像素值,具体操作:
-
用结构元素,扫描图像的每一个像素
-
用结构元素与其覆盖的二值图像做 “与”操作
-
如果都为0,结果图像的该像素为0。否则为1,
也就是在结构元素覆盖范围下,只要有一个像素符和结构元素像素相同,那么中心点对应点就为1,否则为0
简单来说,就是膨胀图像边缘白色(像素值为1)扩大一圈,图示如下:

类似上,公式表述为:
d s t ( x , y ) = m i n ( x ′ , y ′ ) : e l e m e n t ( x ′ , y ′ ) ≠ 0 s r c ( x + x ′ , y + y ′ ) dst(x,y)=\underset{(x',y'):element(x',y')\neq 0}{min}src(x+x',y+y') dst(x,y)=(x′,y′):element(x′,y′)=0minsrc(x+x′,y+y′)
在OpenCV中进行膨胀操作可以采用函数dilate(),或者采用morphologyEx() 函数并输出需要进行的形态学操作类型。如下为cv::dilate()的函数原型,和erode类似:
void dilate(InputArray src, //原始图像
OutputArray dst, //目标图像,和源图片有一样的尺寸和类型
InputArray kernel, //内核,可以使用getStructuringElement来创建结构元素
Point anchor=Point(-1,-1), //锚点的位置,其有默认值(-1,-1),表示锚位于中心
int iterations=1, //迭代使用该函数的次数,默认值为1
int borderType=BORDER_CONSTANT, //用于推断图像外部像素的某种边界模式,默认值BORDER_DEFAULT
const Scalar& borderValue=morphologyDefaultBorderValue() //当边界为常数时的边界值,有默认值morphologyDefaultBorderValue()
)
【注】腐蚀:删除对象边界的某些像素
~~~~~~~~~~ 膨胀:给图像中的对象边界添加像素
四、高级形态学操作
4.1开闭运算
开运算:先腐蚀,再膨胀,可清除一些亮的像素点,放大局部低亮度的区域,在纤细点处分离物体,并且在平滑较大物体的边界的同时不明显改变其面积。
闭运算:先膨胀,再腐蚀,可清除一些暗的像素点,即排除小型黑洞(黑色区域)。
4.2形态学梯度
膨胀图与腐蚀图之差,提取物体边缘,对二值图像进行这一操作可以将边缘突出出来。
4.3黑帽顶帽
顶帽:原图像-开运算图,突出原图像中比周围亮的区域
黑帽:闭运算图-原图像,突出原图像中比周围暗的区域
morphologyEx函数利用基本的膨胀和腐蚀技术,来执行更加高级形态学变换,函数原型为:
void morphologyEx(InputArray src, //原始图像
OutputArray dst, //目标图像
int op, //形态学操作
InputArray kernel, //内核
Point anchor=Point(-1,-1), //锚点 ,其有默认值(-1,-1),表示锚位于中心
int iterations=1, //迭代使用该函数的次数,默认值为1
int borderType=BORDER_CONSTANT, //用于推断图像外部像素的某种边界模式,默认值BORDER_DEFAULT
const Scalar& borderValue=morphologyDefaultBorderValue() //当边界为常数时的边界值,有默认值morphologyDefaultBorderValue(),
)
表示形态学操作的类型OP可取值如下:
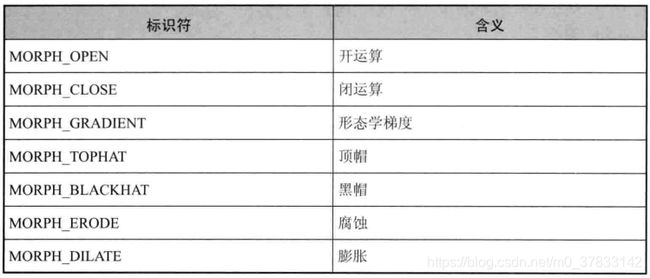
五、基于OpenCV的C++代码实现
下面这段代码分为两个部分,一部分使用OpenCV自带形态学处理函数实现的,一部分使用自己构造函数实现的。
在实现My_open开运算的同时,使用双滚动条控制结构元素的宽(W)和高(H),具体代码如下:
#include滚动条控制内核kernel的W和H得到开运算目标图像,显示如下:

其他效果续更…
参考博客:
【1】【OpenCV(C++)】图像处理:形态学滤波
【2】形态学操作——腐蚀膨胀、开闭运算、顶帽变换底帽变换 c++实现