YOLOv3 代码详解(7) —— 读取pb文件的测试
前言:
yolo系列的论文阅读
论文阅读 || 深度学习之目标检测 重磅出击YOLOv3
论文阅读 || 深度学习之目标检测yolov2
论文阅读 || 深度学习之目标检测yolov1
该篇讲解的工程连接是:
tensorflow的yolov3:https://github.com/YunYang1994/tensorflow-yolov3
自己对该工程的解析博客:
YOLOv3 || 1. 使用自己的数据集训练yolov3
YOLOv3 || 2. dataset.py解析
YOLOv3 || 3. dataset.py的多进程改造
YOLOv3 || 4. yolov3.py 网络结构的搭建和loss的定义
YOLOv3 || 5. train.py
YOLOv3 || 6. anchorboxes的获取 kmeans.py
YOLOv3 || 7. yolov3的pb文件的测试
该篇博客介绍的是yolov3的模型的freeze成pb文件、实际测试调用pb模型
1 代码详解
1.1
freeze_graph.py:将chpt转化为pb文件需要了解的接口(graph的序列话,及下面的接口的说明在自己的另外一片博客中graph的相关操作):
tf.graph_util.convert_variables_to_constants()
该函数,会将计算图中的变量取值以常量的形式保存。在保存模型文件的时候,这里保存了从输入层到输出层的计算过程的Graph_Def。其余所有不涉及的前向传播和所有的反向传播(梯度)都会被舍弃。
在保存的时候,参数output_node_names指定保存的节点名称(不是张量的名称)sess.graph.as_graph_def()
将图进行序列化graph_def.SerializeToString()
将序列化的模型转换为字符串,用于写入文件。import tensorflow as tf from core.yolov3 import YOLOV3 pb_file = "./yolov3_coco.pb" ckpt_file = "./checkpoint/yolov3_coco_demo.ckpt" output_node_names = ["input/input_data", "pred_sbbox/concat_2", "pred_mbbox/concat_2", "pred_lbbox/concat_2"] # 构建yolov3的网络结构图 with tf.name_scope('input'): input_data = tf.placeholder(dtype=tf.float32, name='input_data') model = YOLOV3(input_data, trainable=False) # 创建会话,并从ckpt文件中加载权重 sess = tf.Session(config=tf.ConfigProto(allow_soft_placement=True)) saver = tf.train.Saver() saver.restore(sess, ckpt_file) # 将graph序列话,并只保留由输入到输出的计算的前向通道 # 注意output_node_names为op的列表 converted_graph_def = tf.graph_util.convert_variables_to_constants(sess, input_graph_def = sess.graph.as_graph_def(), output_node_names = output_node_names) with tf.gfile.GFile(pb_file, "wb") as f: f.write(converted_graph_def.SerializeToString())
1.2
images_demo.py:读取pb文件并进行预测import cv2 import numpy as np import core.utils as utils import tensorflow as tf from PIL import Image return_elements = ["input/input_data:0", "pred_sbbox/concat_2:0", "pred_mbbox/concat_2:0", "pred_lbbox/concat_2:0"] pb_file = "./yolov3_coco.pb" image_path = "./docs/images/road.jpeg" num_classes = 80 input_size = 416 graph = tf.Graph() original_image = cv2.imread(image_path) original_image = cv2.cvtColor(original_image, cv2.COLOR_BGR2RGB) original_image_size = original_image.shape[:2] # 数据预处理,具体函数后面解析 image_data = utils.image_preporcess(np.copy(original_image), [input_size, input_size]) image_data = image_data[np.newaxis, ...] # 读取pb文件,具体函数后面解析 return_tensors = utils.read_pb_return_tensors(graph, pb_file, return_elements) with tf.Session(graph=graph) as sess: pred_sbbox, pred_mbbox, pred_lbbox = sess.run( [return_tensors[1], return_tensors[2], return_tensors[3]], feed_dict={ return_tensors[0]: image_data}) pred_bbox = np.concatenate([np.reshape(pred_sbbox, (-1, 5 + num_classes)), np.reshape(pred_mbbox, (-1, 5 + num_classes)), np.reshape(pred_lbbox, (-1, 5 + num_classes))], axis=0) bboxes = utils.postprocess_boxes(pred_bbox, original_image_size, input_size, 0.3) # 使用非极大值抑制进行后处理,具体函数后面解析 bboxes = utils.nms(bboxes, 0.45, method='nms') image = utils.draw_bbox(original_image, bboxes) image = Image.fromarray(image) image.show()
1.2.1
def read_pb_return_tensors()读取pb文件导入pb文件思路:
- 使用tf.Graph、tf.GraphDef分别创建个Graph、GraphDef
- 用tensorflow的api
tf.gfile.FastGFile(pb_file, 'rb')打开pb文件,并使用.ParseFromString(f.read())导入到GraphDef中- 使用
tf.import_graph_def将GraphDef中的网络结构和参数导入到Graph中。# pb_file = "./yolov3_coco.pb" # return_elements = ["input/input_data:0", "pred_sbbox/concat_2:0", >"pred_mbbox/concat_2:0", "pred_lbbox/concat_2:0"] # graph = tf.Graph() def read_pb_return_tensors(graph, pb_file, return_elements): with tf.gfile.FastGFile(pb_file, 'rb') as f: frozen_graph_def = tf.GraphDef() frozen_graph_def.ParseFromString(f.read()) with graph.as_default(): return_elements = tf.import_graph_def(frozen_graph_def, return_elements=return_elements) return return_elements
1.2.2
def image_preporcess()数据预处理该函数在yolov3 的数据处理中已经使用过(缩放和填充图片到target_shape)。
已知神经网络设定的输入数据的大小为target_shape。
def parse_annotation():将图片缩放并填充到target_size,并以相同缩放或填充规则处理bboxes,此时bboxes为【左上角-右下角】的形式。
具体缩放填充的方式为:
- 缩放:计算图片的长边与target_shape的比值,然后用该比值对原图进行缩放(这样会保持原图的长宽原有比例)
- 填充:然后将图片的短边填充到target_shape
def image_preporcess(image, target_size, gt_boxes=None): image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB).astype(np.float32) ih, iw = target_size h, w, _ = image.shape scale = min(iw/w, ih/h) # 获取长边与target_shape的比值 nw, nh = int(scale * w), int(scale * h) # 获取缩放后的图片的shape image_resized = cv2.resize(image, (nw, nh)) # 缩放图片 image_paded = np.full(shape=[ih, iw, 3], fill_value=128.0) # 创建个target_shape大小的图片,并用128填充 dw, dh = (iw - nw) // 2, (ih-nh) // 2 image_paded[dh:nh+dh, dw:nw+dw, :] = image_resized # 将缩放后的图片放在image_paded的中间位置 image_paded = image_paded / 255. # 将图片除以255,进行归一化 if gt_boxes is None: return image_paded else: # 将缩放和填充的操作,应用到bboxes上 gt_boxes[:, [0, 2]] = gt_boxes[:, [0, 2]] * scale + dw gt_boxes[:, [1, 3]] = gt_boxes[:, [1, 3]] * scale + dh return image_paded, gt_boxes
1.2.3
def postprocess_boxes()预测框的后处理def postprocess_boxes(pred_bbox, org_img_shape, input_size, score_threshold): print(pred_bbox.shape) valid_scale=[0, np.inf] pred_bbox = np.array(pred_bbox) pred_xywh = pred_bbox[:, 0:4] pred_conf = pred_bbox[:, 4] pred_prob = pred_bbox[:, 5:] ## (1) 将坐标由(x,y,w,h),转换到【左上角右下角】的坐标形式 pred_coor = np.concatenate([pred_xywh[:, :2] - pred_xywh[:, 2:] * 0.5, pred_xywh[:, :2] + pred_xywh[:, 2:] * 0.5], axis=-1) ## (2) 将boxes在输入尺寸的坐标,转化到原图尺寸上的坐标 org_h, org_w = org_img_shape resize_ratio = min(input_size / org_w, input_size / org_h) dw = (input_size - resize_ratio * org_w) / 2 # 获取到填充边的宽度 dh = (input_size - resize_ratio * org_h) / 2 # 获取到填充边的宽度 pred_coor[:, 0::2] = 1.0 * (pred_coor[:, 0::2] - dw) / resize_ratio pred_coor[:, 1::2] = 1.0 * (pred_coor[:, 1::2] - dh) / resize_ratio ## (3) 去除错误框 pred_coor = np.concatenate([np.maximum(pred_coor[:, :2], [0, 0]), np.minimum(pred_coor[:, 2:], [org_w - 1, org_h - 1])], axis=-1) invalid_mask = np.logical_or((pred_coor[:, 0] > pred_coor[:, 2]), (pred_coor[:, 1] ,pred_coor[:, 3])) pred_coor[invalid_mask] = 0 ## (4) 保留面积为正的框 bboxes_scale = np.sqrt(np.multiply.reduce(pred_coor[:, 2:4] - pred_coor[:, 0:2], axis=-1)) scale_mask = np.logical_and((valid_scale[0] < bboxes_scale), (bboxes_scale < valid_scale[1])) ## (5) 去除得分很低的框 classes = np.argmax(pred_prob, axis=-1) scores = pred_conf * pred_prob[np.arange(len(pred_coor)), classes] score_mask = scores > score_threshold ## 获取最终保留框的mask,以此获取最后的框的相应的信息 mask = np.logical_and(scale_mask, score_mask) coors, scores, classes = pred_coor[mask], scores[mask], classes[mask] return np.concatenate([coors, scores[:, np.newaxis], classes[:, np.newaxis]], axis=-1)
1.2.4
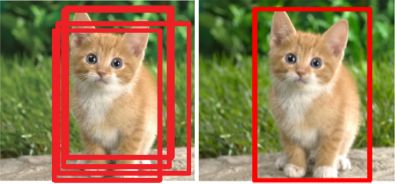
def nms()非极大值抑制在yolo系列的论文阅读中,有介绍到非极大值抑制
具体操作步骤:(一张图片上有猫,假设有N个框,每个框被分类器计算得分Si,1<=i<=N)
a) 构建一个集合H,初始化包括N个框;构建一个集合O,初始化空集
b) 将集合H中的框按得分大小排序,将得分最高的框m,从集合H移至O
c) 遍历集合H中的框,分别与框m计算IoU。如果高于阈值(一般为0.3~0.5),则认为与此框重叠,将此框从集合H删除
d) 回到第1步,进行迭代,直至集合H为空。集合O中的框为我们所需(集合O中有几个框,图片中就有几只猫)
def nms(bboxes, iou_threshold, sigma=0.3, method='nms'): """ :param bboxes: (xmin, ymin, xmax, ymax, score, class) Note: soft-nms, https://arxiv.org/pdf/1704.04503.pdf https://github.com/bhara a bvc tsingh430/soft-nms """ # 获取图片中目标物体共有多少种 classes_in_img = list(set(bboxes[:, 5])) best_bboxes = [] # 针对相同种类的bbox进行计算nms for cls in classes_in_img: cls_mask = (bboxes[:, 5] == cls) cls_bboxes = bboxes[cls_mask] while len(cls_bboxes) > 0: # 找到得分最高的box max_ind = np.argmax(cls_bboxes[:, 4]) best_bbox = cls_bboxes[max_ind] best_bboxes.append(best_bbox) # 从cls_bboxes中去除得分最高的框 cls_bboxes = np.concatenate([cls_bboxes[: max_ind], cls_bboxes[max_ind + 1:]]) # 计算得分最高的框与其余框的iou iou = bboxes_iou(best_bbox[np.newaxis, :4], cls_bboxes[:, :4]) # 保存着标志符 weight = np.ones((len(iou),), dtype=np.float32) assert method in ['nms', 'soft-nms'] if method == 'nms': iou_mask = iou > iou_threshold weight[iou_mask] = 0.0 # iou大于阈值的标识符为0 if method == 'soft-nms': weight = np.exp(-(1.0 * iou ** 2 / sigma)) # 根据标识符,将大于阈值的boxes的得分置零 cls_bboxes[:, 4] = cls_bboxes[:, 4] * weight score_mask = cls_bboxes[:, 4] > 0. # 根据得分,将boxes的信息置零或保存 cls_bboxes = cls_bboxes[score_mask] return best_bboxes