【Note】CNN与现代卷积神经网络part4(附PyTorch代码)
文章目录
-
- 2.2 残差网络(ResNet)
-
- 2.2.1 函数类
- 2.2.2 残差块
- 2.2.3 ResNet模型
- 2.2.4 训练模型
- 2.2.5 Summary
本《CNN与现代卷积神经网络》Note系列会共分为4个part,本文为part4。本Markdown共4k字。
2.2 残差网络(ResNet)
随着我们设计越来越深的网络,深刻理解“新添加的层如何提升神经网络的性能”变得至关重要。更重要的是设计网络的能力,在这种网络中,添加层会使网络更具表现力, 为了取得质的突破,我们需要一些数学基础知识。
2.2.1 函数类
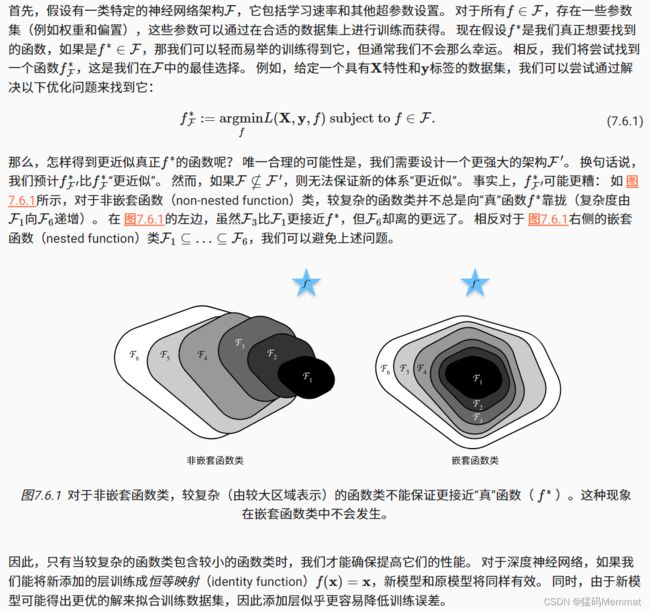
针对这一问题,何恺明等人提出了残差网络(ResNet) (He et al., 2016)。 它在2015年的ImageNet图像识别挑战赛夺魁,并深刻影响了后来的深度神经网络的设计。 残差网络的核心思想是:每个附加层都应该更容易地包含原始函数作为其元素之一。 于是,残差块(residual blocks)便诞生了,这个设计对如何建立深层神经网络产生了深远的影响。 凭借它,ResNet赢得了2015年ImageNet大规模视觉识别挑战赛。
2.2.2 残差块
在残差块中,输入可通过跨层数据线路更快地向前传播。

一个正常块(左图)和一个残差块(右图)
ResNet沿用了VGG完整的 3 × 3 3\times 3 3×3卷积层设计。 残差块里首先有2个有相同输出通道数的 3 × 3 3\times 3 3×3卷积层。 每个卷积层后接一个批量规范化层和ReLU激活函数。 然后我们通过跨层数据通路,跳过这2个卷积运算,将输入直接加在最后的ReLU激活函数前。 这样的设计要求2个卷积层的输出与输入形状一样,从而使它们可以相加。 如果想改变通道数,就需要引入一个额外的 1 × 1 1\times 1 1×1卷积层来将输入变换成需要的形状后再做相加运算。 残差块的实现如下:
import torch
from torch import nn
from torch.nn import functional as F
from d2l import torch as d2l
class Residual(nn.Module): #@save
def __init__(self, input_channels, num_channels,
use_1x1conv=False, strides=1):
super().__init__()
self.conv1 = nn.Conv2d(input_channels, num_channels,
kernel_size=3, padding=1, stride=strides)
self.conv2 = nn.Conv2d(num_channels, num_channels,
kernel_size=3, padding=1)
if use_1x1conv:
self.conv3 = nn.Conv2d(input_channels, num_channels,
kernel_size=1, stride=strides)
else:
self.conv3 = None
self.bn1 = nn.BatchNorm2d(num_channels)
self.bn2 = nn.BatchNorm2d(num_channels)
def forward(self, X):
Y = F.relu(self.bn1(self.conv1(X)))
Y = self.bn2(self.conv2(Y))
if self.conv3:
X = self.conv3(X)
Y += X
return F.relu(Y)
如图所示,此代码生成两种类型的网络:一种是当use_1x1conv=False时,应用ReLU非线性函数之前,将输入添加到输出。另一种是当use_1x1conv=True时,添加通过 1 × 1 1\times 1 1×1卷积调整通道和分辨率。
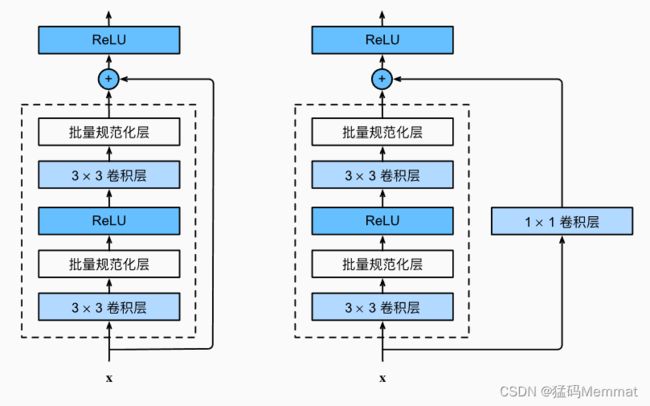
包含以及不包含 1 × 1 1\times 1 1×1卷积层的残差块
下面我们来查看输入和输出形状一致的情况。
blk = Residual(3,3)
X = torch.rand(4, 3, 6, 6)
Y = blk(X)
Y.shape
![]()
我们也可以在增加输出通道数的同时,减半输出的高和宽。
blk = Residual(3,6, use_1x1conv=True, strides=2)
blk(X).shape
![]()
2.2.3 ResNet模型
ResNet的前两层跟GoogLeNet中的一样: 在输出通道数为64、步幅为2的 7 × 7 7\times 7 7×7 卷积层后,接步幅为2的 3 × 3 3\times 3 3×3 的最大汇聚层。不同之处在于ResNet每个卷积层后增加了批量规范化层。
b1 = nn.Sequential(nn.Conv2d(1, 64, kernel_size=7, stride=2, padding=3),
nn.BatchNorm2d(64), nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
GoogLeNet在后面接了4个由Inception块组成的模块。 ResNet则使用4个由残差块组成的模块,每个模块使用若干个同样输出通道数的残差块。 第一个模块的通道数同输入通道数一致。 由于之前已经使用了步幅为2的最大汇聚层,所以无须减小高和宽。 之后的每个模块在第一个残差块里将上一个模块的通道数翻倍,并将高和宽减半。
下面我们来实现这个模块。注意,我们对第一个模块做了特别处理。
def resnet_block(input_channels, num_channels, num_residuals,
first_block=False):
blk = []
for i in range(num_residuals):
if i == 0 and not first_block:
blk.append(Residual(input_channels, num_channels,
use_1x1conv=True, strides=2))
else:
blk.append(Residual(num_channels, num_channels))
return blk
接着在ResNet加入所有残差块,这里每个模块使用2个残差块。
b2 = nn.Sequential(*resnet_block(64, 64, 2, first_block=True))
b3 = nn.Sequential(*resnet_block(64, 128, 2))
b4 = nn.Sequential(*resnet_block(128, 256, 2))
b5 = nn.Sequential(*resnet_block(256, 512, 2))
最后,与GoogLeNet一样,在ResNet中加入全局平均汇聚层,以及全连接层输出。
net = nn.Sequential(b1, b2, b3, b4, b5,
nn.AdaptiveAvgPool2d((1,1)),
nn.Flatten(), nn.Linear(512, 10))
每个模块有4个卷积层(不包括恒等映射的 1 × 1 1\times 1 1×1卷积层)。加上第一个 7 × 7 7\times 7 7×7卷积层和最后一个全连接层,共有18层。因此,这种模型通常被称为ResNet-18。 通过配置不同的通道数和模块里的残差块数可以得到不同的ResNet模型,例如更深的含152层的ResNet-152。 虽然ResNet的主体架构跟GoogLeNet类似,但ResNet架构更简单,修改也更方便。这些因素都导致了ResNet迅速被广泛使用。下图描述了完整的ResNet-18。
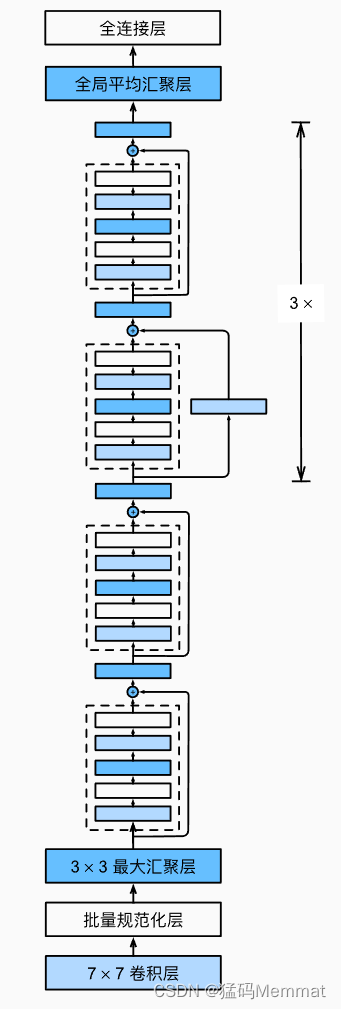
ResNet-18 架构
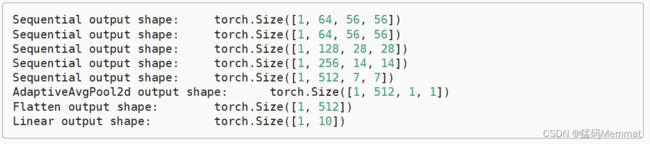
在训练ResNet之前,让我们观察一下ResNet中不同模块的输入形状是如何变化的。 在之前所有架构中,分辨率降低,通道数量增加,直到全局平均汇聚层聚集所有特征。
X = torch.rand(size=(1, 1, 224, 224))
for layer in net:
X = layer(X)
print(layer.__class__.__name__,'output shape:\t', X.shape)
2.2.4 训练模型
同之前一样,我们在Fashion-MNIST数据集上训练ResNet。
lr, num_epochs, batch_size = 0.05, 10, 256
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size, resize=96)
d2l.train_ch6(net, train_iter, test_iter, num_epochs, lr, d2l.try_gpu())


2.2.5 Summary
- 学习嵌套函数(nested function)是训练神经网络的理想情况。在深层神经网络中,学习另一层作为恒等映射(identity function)较容易(尽管这是一个极端情况)。
- 残差映射可以更容易地学习同一函数,例如将权重层中的参数近似为零。
- 利用残差块(residual blocks)可以训练出一个有效的深层神经网络:输入可以通过层间的残余连接更快地向前传播。
- 残差网络(ResNet)对随后的深层神经网络设计产生了深远影响。