linux调度器 - CPU负载 LoyenWang
2. 全局CPU平均负载
2.1 基础概念
先来明确两个与CPU负载计算相关的概念:
-
active task(活动任务):只有知道活动任务数量,才能计算CPU负载,而活动任务包括了TASK_RUNNING和TASK_UNINTERRUPTIBLE两类任务。包含TASK_UNINTERRUPTIBLE任务的原因是,这类任务经常是在等待I/O请求,将其包含在内也合理; -
NO_HZ:我们都知道Linux内核每隔固定时间发出timer interrupt,而HZ是用来定义1秒中的timer interrupts次数,HZ的倒数是tick,是系统的节拍器,每个tick会处理包括调度器、时间管理、定时器等事务。周期性的时钟中断带来的问题是,不管CPU空闲或繁忙都会触发,会带来额外的系统损耗,因此引入了NO_HZ模式,可以在CPU空闲时将周期性时钟关掉。在NO_HZ期间,活动任务数量的改变也需要考虑,而它的计算不如周期性时钟模式下直观。
2.2 流程
Linux内核中定义了三个全局变量值avenrun[3],用于存放最近1/5/15分钟的平均CPU负载。
看一下计算流程:
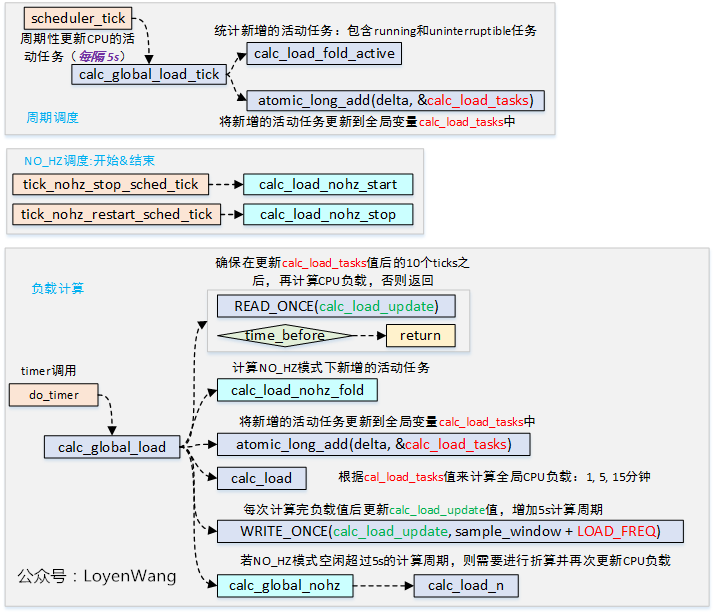
- 计算活动任务数,这个包括两部分:1)周期性调度中新增加的活动任务;2)在
NO_HZ期间增加的活动任务数; - 根据活动任务数值,再结合全局变量值
avenrun[]中的old value,来计算新的CPU负载值,并最终替换掉avenrun[]中的值; - 系统默认每隔5秒钟会计算一次负载,如果由于
NO_HZ空闲而错过了下一个CPU负载的计算周期,则需要再次进行更新。比如NO_HZ空闲20秒而无法更新CPU负载,前5秒负载已经更新,需要计算剩余的3个计算周期的负载来继续更新;
2.3 计算方法
Linux内核中,采用11位精度的定点化计算,CPU负载1.0由整数2048表示,宏定义如下:
#define FSHIFT 11 /* nr of bits of precision */
#define FIXED_1 (1<计算公式如下:
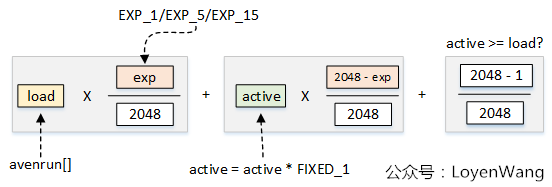
load值为旧的CPU负载值avenrun[],整个计算完成后得到新的负载值,再更新avenrun[];EXP_1/EXP_5/EXP_15,分别代表最近1/5/15分钟的定点化值的指数因子;active值,根据读取calc_load_tasks的值来判断,大于0则乘以FIXED_1(2048)传入;- 根据
active和load值的大小关系来决定是否需要加1,类似于四舍五入的机制;
关键代码如下:
active = atomic_long_read(&calc_load_tasks);
active = active > 0 ? active * FIXED_1 : 0;
avenrun[0] = calc_load(avenrun[0], EXP_1, active);
avenrun[1] = calc_load(avenrun[1], EXP_5, active);
avenrun[2] = calc_load(avenrun[2], EXP_15, active);
NO_HZ模式下活动任务数量更改的计算
由于NO_HZ空闲效应而更改的CPU活动任务数量,存放在全局变量calc_load_nohz[2]中,并且每5秒计算周期交替更换一次存储位置(calc_load_read_idx/calc_load_write_idx),其他程序可以去读取最近5秒内的活动任务变化的增量值。
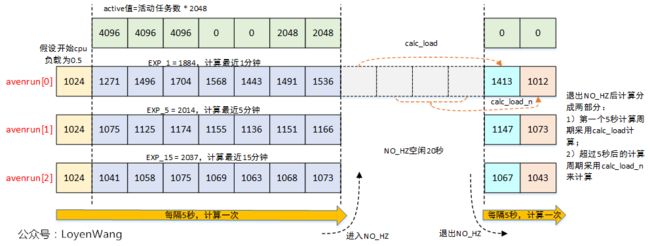
计算示例
假设在某个CPU上,开始计算时load=0.5,根据calc_load_tasks值获取不同的active,中间进入NO_HZ模式空闲了20秒,整个计算的值如下图:
3. 运行队列CPU负载
- Linux系统会计算每个tick的平均CPU负载,并将其存储在运行队列中
rq->cpu_load[5],用于负载均衡;
下图显示了计算运行队列的CPU负载的处理流程:
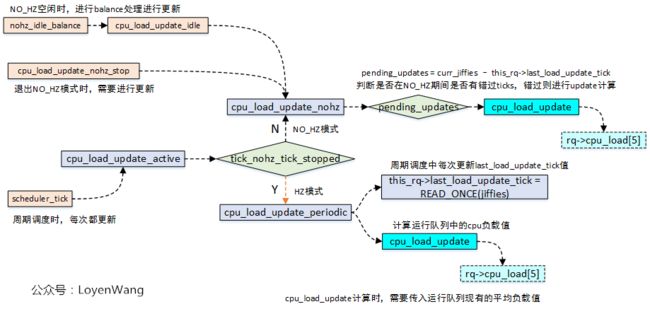
最终通过cpu_load_update来计算,逻辑如下:
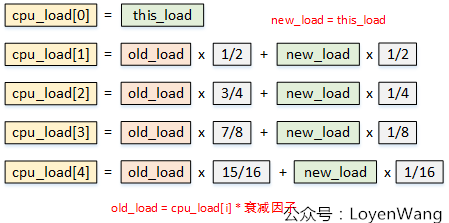
- 其中传入的
this_load值,为运行队列现有的平均负载值。
上图中的衰减因子,是在NO_HZ模式下去进行计算的。在没有使用tick时,从预先计算的表中计算负载值。Linux内核中定义了两个全局变量:
#define DEGRADE_SHIFT 7
static const u8 degrade_zero_ticks[CPU_LOAD_IDX_MAX] = {0, 8, 32, 64, 128};
static const u8 degrade_factor[CPU_LOAD_IDX_MAX][DEGRADE_SHIFT + 1] = {
{ 0, 0, 0, 0, 0, 0, 0, 0 },
{ 64, 32, 8, 0, 0, 0, 0, 0 },
{ 96, 72, 40, 12, 1, 0, 0, 0 },
{ 112, 98, 75, 43, 15, 1, 0, 0 },
{ 120, 112, 98, 76, 45, 16, 2, 0 }
};
衰减因子的计算主要是在delay_load_missed()函数中完成,该函数会返回load * 衰减因子的值,作为上图中的old_load。
计算方式如下:

4. PELT
PELT, Per-entity load tracking。在Linux引入PELT之前,CFS调度器在计算CPU负载时,通过跟踪每个运行队列上的负载来计算;在引入PELT之后,通过跟踪每个调度实体的负载贡献来计算。(其中,调度实体:指task或task_group)
4.1 PELT计算方法
总体的计算思路:
将调度实体的可运行状态时间(正在运行+等待CPU调度运行),按1024us划分成不同的周期,计算每个周期内该调度实体对系统负载的贡献,最后完成累加。其中,每个计算周期,随着时间的推移,需要乘以衰减因子y进行一次衰减操作。
先来看一下每个调度实体的负载贡献计算公式:

- 当前时间点的负载贡献 = 当前时间点负载 + 上个周期负载贡献 * 衰减因子;
- 假设一个调度实体被调度运行,运行时间段可以分成三个段
d1/d2/d3,这三个段是被1024us的计算周期分割而成,period_contrib是调度实体last_update_time时在计算周期间的贡献值,; - 总体的贡献值,也是根据
d1/d2/d3来分段计算,最终相加即可; y为衰减因子,每隔1024us就乘以y来衰减一次;
计算的调用流程如下图:
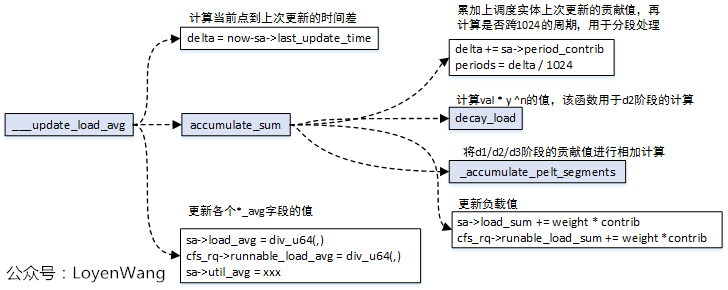
- 函数主要是计算时间差,再分成d1/d2/d3来分段计算处理,最终更新相应的字段;
decay_load函数要计算val * y^n,内核提供了一张表来避免浮点运算,值存储在runnable_avg_yN_inv数组中;
static const u32 runnable_avg_yN_inv[] = {
0xffffffff, 0xfa83b2da, 0xf5257d14, 0xefe4b99a, 0xeac0c6e6, 0xe5b906e6,
0xe0ccdeeb, 0xdbfbb796, 0xd744fcc9, 0xd2a81d91, 0xce248c14, 0xc9b9bd85,
0xc5672a10, 0xc12c4cc9, 0xbd08a39e, 0xb8fbaf46, 0xb504f333, 0xb123f581,
0xad583ee9, 0xa9a15ab4, 0xa5fed6a9, 0xa2704302, 0x9ef5325f, 0x9b8d39b9,
0x9837f050, 0x94f4efa8, 0x91c3d373, 0x8ea4398a, 0x8b95c1e3, 0x88980e80,
0x85aac367, 0x82cd8698,
};
Linux中使用struct sched_avg来记录调度实体和CFS运行队列的负载信息,因此struct sched_entity和struct cfs_rq结构体中,都包含了struct sched_avg,字段介绍如下:
struct sched_avg {
u64 last_update_time; //上一次负载更新的时间,主要用于计算时间差;
u64 load_sum; //可运行时间带来的负载贡献总和,包括等待调度时间和正在运行时间;
u32 util_sum; //正在运行时间带来的负载贡献总和;
u32 period_contrib; //上一次负载更新时,对1024求余的值;
unsigned long load_avg; //可运行时间的平均负载贡献;
unsigned long util_avg; //正在运行时间的平均负载贡献;
};
4.2 PELT计算调用
PELT计算的发生时机如下图所示:

- 调度实体的相关操作,包括入列出列操作,都会进行负载贡献的计算;
PELT的算法还在持续的改进中,各个内核版本也存在差异,大体的思路已经在上文中介绍到了,细节就不再深入分析了。