m基于flocking算法的无人机群空间避障飞行matlab仿真,对比二维场景和三维场景
目录
1.算法描述
2.仿真效果预览
3.MATLAB核心程序
4.完整MATLAB
1.算法描述
近年来,随着通信网络、人工智能、自主系统、大数据的前沿技术的发展, 无人机蜂群作战也正在由概念变成现实,从理论走向实践。航迹规划,多机协作, 集群控制等问题成为当下研究热点。在军事作战中派遣多无人机协同作战相比于 单无人机能够在穿透敌方防御系统,探测目标以及执行攻击任务等方面更具优势 [1],采用大规模、低成本的无人机蜂群进行低空突防,实施饱和攻击已成为一种全 新的"非对称"对抗战术[2]。在各种民事应用中,无人机蜂群已经被广泛用于环境 和自然灾害监测、边境监视、突发事件援助、搜索和救援、货物传递和建筑等任务。随着航空技术与人工智能的迅速发展,无人机以其操作灵活,成本低廉等特 点,在民用及军事领域都有广阔的应用前景。
基于无人机(Unmanned Aerial Vehicle, UAV)的各种应用是一个近年来得到飞速发展的高技术领域。由于单架 UAV 存在能力受限、可靠性弱等缺点,由多 UAV 协作构成多 UAV 蜂群可以更高效、更可靠、更低代价地支持完成各种任务。
无人机蜂群是由若干配备多种任务载荷的低成本小型无人机组成,参照蜜蜂 等昆虫的集体行动模式,以智能化无人控制技术和网络信息系统为支撑,在人类指挥或监督下共同完成特定作战任务。无人机蜂群可以是同构的,也可以是异构 的,其以数量众多、群体智能为典型特征,可实现协同任务分配、协同探测和协同 攻击,能够极大增强无人机的通信能力和抗毁伤能力,扩展无人机对战场信息的 感知获取能力,提高无人机协同执行任务的能力。
Flocking(有时也称为是warming或herding),拥有4项简单的规则,把它们组合在一起时,为自治主体群给出一个类似于鸟群、鱼群的群体行为的逼真形式。定向行为规则:分离原则、列队原则、聚合原则、躲避原则
分离原则:定向时要避免与本地flock同伴拥挤。即定时检测邻近同伴,避免拥挤;
列队原则:驶向本地flock同伴的平均航向。即检测邻近同伴航向、速度,获取平均值并调整自己;
聚合原则:定向时朝着本地flock同伴的平均位置移动。即检测邻近同伴,平均位置然后调整其匹配航向;
躲避原则:使避免撞上局部区域内的障碍或敌人。即“向前看一段距离”,遇到障碍物、敌人调整航向、速度进行躲避。

无人机蜂群网络是一种由大量节点组成的分层、多簇结构的无线通信网络。 针对多无人机协同任务分配问题,提出了一种新的系统框架。将其转化为一个组合优化问题,并用改进的聚类算法进行求解。目的是使多无人机以低能耗完 成任务。随着无人机数量的增加,无人机之间的碰撞等飞行安全问题也随之出现,提出了一种基于改进人工势场的多无人机抗碰撞改进方法。针对联网无人机易受到各种网络攻击的问题,提出了一种基于入侵检测系统 (IDS)的多无人机执行任务时抵抗网络攻击的方法。为了进一步提高任务分配的 准确性,提出了一种改进的方法。此外,提出了一种在线实时路径规划和任务重 新分配方法,以增强多无人机的鲁棒性,特别是在任务中增加一个紧急目标等突 发问题的响应。最后,数值仿真和真实的物理飞行实验表明,该方法为多无人机 任务分配提供了一种可行的解决方案,与其他任务分配方法相比,该方法具有良好的性能。
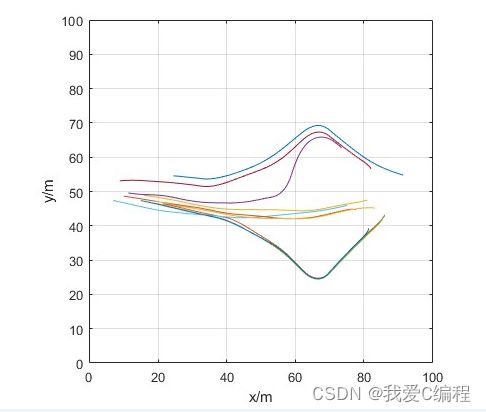
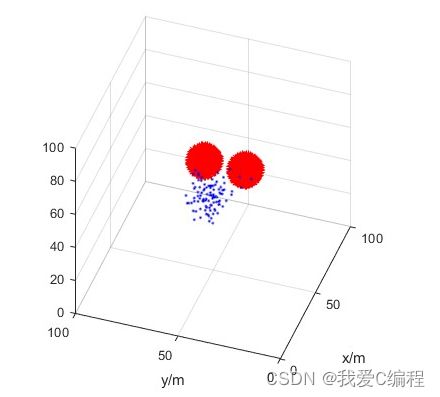
2.仿真效果预览
matlab2022a仿真结果如下:






3.MATLAB核心程序
.................................................................
for i = 1:UAV_num
if norm(Speed_0(i,:))~=0
Speed_0(i,:) = Speed_0(i,:)/norm(Speed_0(i,:));
end
while 1
%初始化随机位置
Position_0(i,:) = [rand*Width/4,randn*Width/40+Width/2, randn*Width/40+Width/2,atan2(Speed_0(i,2), Speed_0(i,1))];
%计算任意两个无人机之间的距离
d = func_dist_btuav(Position_0(1:i-1,1:3), Position_0(i,1:3));
if( all(d>0.5))
break
end
end
end
Position = Position_0;
Speed = Speed_0;
..............................................................
for t = 0:ts:TIMES
t
i=i+1;
%flocking控制,输出速度变量
Speed1 = func_flocking_Speed(Position(:,[1,2,4]),Speed(:,[1,2]),Radius);
Speed2 = func_flocking_Speed(Position(:,[2,3,4]),Speed(:,[2,3]),Radius);
Speed3 = func_flocking_Speed(Position(:,[1,3,4]),Speed(:,[1,3]),Radius);
Speed = [Speed1(:,1)+Speed3(:,1),Speed1(:,2)+Speed2(:,1),Speed2(:,2)+Speed3(:,2)]/2;
for j = 1:UAV_num
theta = atan((Goal(2)-Position(j,2))/(Goal(1)-Position(j,1)));
theta_ = atan((Goal(3)-Position(j,3))/(Goal(2)-Position(j,2)));
for jc = 1:2
dist(jc) = sqrt((Position(j,1) - C(jc,1))^2 + (Position(j,2) - C(jc,2))^2 + (Position(j,3) - C(jc,3))^2);
end
%检测无人机和障碍物之间的间距,通过flocking控制器和PPO,作用到无人机,做出避障的运动决策
%注意,如果采用PID+flocking的控制方式,响应速度kg大约为0.6左右,不同控制策略,响应速度不一样,如果要对比则修改kg参数
[V,I] = min(dist);
if Position(j,1)<=max(C(1,1),C(2,1))
if Position(j,2)>1.02*(C(1,2)+R(1)) & Position(j,2)<0.98*(C(2,2)-R(2))
vv(j,:) = [0.8*Speedv,0,Speedv*sin(theta)*sin(theta_)];
else
if Position(j,2)<=1.02*(C(1,2)+R(1)) %第二个障碍物
if dist(I) >= (1+6*Kg)*R(I)%不避障
vv(j,:) = [0.8*Speedv,0,Speedv*sin(theta)*sin(theta_)];
else%切线方式避障
theta0 = atan((C(1,2)-Position(j,2))/(C(1,1)-Position(j,1)));
d0 = sqrt((C(1,2)-Position(j,2))^2+(C(1,1)-Position(j,1))^2);
theta1 = -real(asin(1.3*R(1)/d0));
if Position(j,2)=0.98*(C(2,2)-R(2))%第一个障碍物
if dist(I) >= (1+6*Kg)*R(I)%不避障
vv(j,:) = [0.8*Speedv,0,Speedv*sin(theta)*sin(theta_)];
else%切线方式避障
theta0 = atan((C(2,2)-Position(j,2))/(C(2,1)-Position(j,1)));
d0 = sqrt((C(2,2)-Position(j,2))^2+(C(2,1)-Position(j,1))^2);
theta1 = real(asin(1.3*R(2)/d0));
if Position(j,2) 4.完整MATLAB
V