AdaBins:Depth Estimation using Adaptive Bins
文章目录
- 一、AdaBins处理的问题
- 二、AdaBins整体架构
- 1.MVIT
- 2.个人理解
一、AdaBins处理的问题?
并提出了全局信息处理如何帮助改进整体深度估计的问题。
提出了一种基于变换的体系结构块,该结构块将深度范围划分为每个图像自适应地估计其中心值的子块。最终深度值估计为面元中心的线性组合。
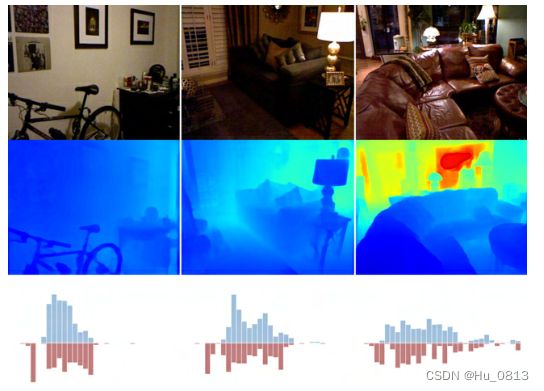
这是论文中给的GT深度分布图和预测的深度分布图,如果两者在深度分布上能够尽可能达到一致的话,其实就已经将损失降到了一定的程度
二、AdaBins整体架构

文章采用传统的编解码模块 Encoder:EfficientNet B5 (这里不做介绍),Decoder得到的feature-map 进入本文中提到的mVIT模块 这也是本文中的核心所在
1.MVIT

对于decoder得到的feature-map channel=128 通过2个分支,我们先看一下底部的Transformer部分
class PatchTransformerEncoder(nn.Module):
def __init__(self, in_channels, patch_size=10, embedding_dim=128, num_heads=4):
super(PatchTransformerEncoder, self).__init__()
encoder_layers = nn.TransformerEncoderLayer(embedding_dim, num_heads, dim_feedforward=1024)
self.transformer_encoder = nn.TransformerEncoder(encoder_layers, num_layers=4) # takes shape S,N,E
self.embedding_convPxP = nn.Conv2d(in_channels, embedding_dim,
kernel_size=patch_size, stride=patch_size, padding=0)
self.positional_encodings = nn.Parameter(torch.rand(500, embedding_dim), requires_grad=True)
def forward(self, x):
embeddings = self.embedding_convPxP(x).flatten(2) # .shape = n,c,s = n, embedding_dim, s
# embeddings = nn.functional.pad(embeddings, (1,0)) # extra special token at start ?
embeddings = embeddings + self.positional_encodings[:embeddings.shape[2], :].T.unsqueeze(0)
# change to S,N,E format required by transformer
embeddings = embeddings.permute(2, 0, 1)
x = self.transformer_encoder(embeddings) # .shape = S, N, E
return x
作者使用了一个简化版的vit ,feature_map x通过一个卷积嵌入,得到 Transformer输入需要的token
与vit类似的操作,加了一个位置编码,并将其转化输入进入4层transformer Encoder层,详细步骤可以看一下vit代码,得到的 x:SxBx128 demo: S=15*20=300
Bin widths = x[0,:] # 1x128
query = x[1:128+1,:,:] # 128xBx128
query经过permute -->Bx128x128 #后面的128是维度
如果将此时的query再次经过permute(0,2,1) 此时中间的128是维度
接着看mvit上部分支 feature map经过3*3特征图经过结果与query进行矩阵相乘,非点乘
feature-map.T 与 query进行矩阵相乘 得到 range_attention_maps .size=B x (hxw) x 128
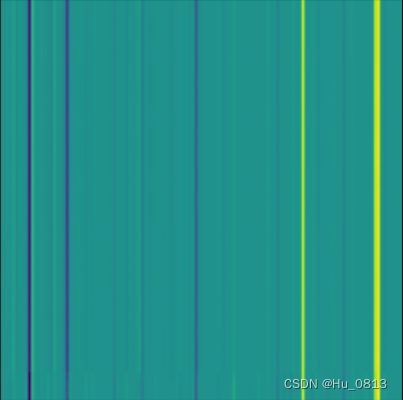
看一下此时的range_attention_map图左与最终图右区别


接着将上述的map图通过3个linear层,得到 bin_widths_normed = 1*256
range_attention_map经过卷积层得到与bin_widths_normed相同的维度1x256x240x320
out=range_attention_map
bin_widths可以通过最大最小值计算出 并*bin_widths_normed将 bin 划分为256份
通过取bin的中间center进行回归操作,以最小深度在左侧添加一个深度bin, 此时bin有257份
通过torch.cumsum 可以得到深度bin的边界(从min_depth开始)
详情参考代码
bin_widths = (self.max_val - self.min_val) * bin_widths_normed
bin_widths = nn.functional.pad(bin_widths, (1, 0), mode='constant', value=self.min_val)
bin_edges = torch.cumsum(bin_widths, dim=1) #torch.cumsum 第一列不变,其他每一列累加至最后一列
centers = 0.5 * (bin_edges[:, :-1] + bin_edges[:, 1:])
# bin_edges[:,:-1]指的是从第一个元素到倒数第二个元素, bin_edges[:,1:]指的是从第二个元素到最后一个元素
n, dout = centers.size()
centers = centers.view(n, dout, 1, 1)
pred = torch.sum(out * centers, dim=1, keepdim=True)2.个人理解
一个图片分成若干个patch之后 将此时的patch进行线性操作,然后经过若干层的自注意力机制之后,此时这个patch是与整张图片通过相似度建立了联系。
比如说 patch1[:,1]是与白色相关的,那整张图片对应位置白色居多的话,那么patch1[:,1]与之点乘 权值就大,其他相应的响应也类似,比如说同样在depth0-depth1深度的响应就会大。
作者通过损失函数的约束,将TRansformer输出结果,聚集于关注深度值
在vit模型中MLP输出的是分类的结果,在本篇论文模型中,输出的是深度的信息 bin
query得到的是全局信息中的不同深度值 如下图所示
feature map 与query构成一个 query 与 key 的匹配,之后得到的map[i] 就是深度为query[i]的响应
然后再将深度信息 bin 映射到数据处理中的min_depth-—max_depth 防止伪影,网格的生成,再将再将map中的不同bin的center进行一个平滑处理,就是线性回归
这里损失函数就不再赘述
转载请标注出处