嵌入式系统——知识点串联
文章目录
- 1. 冯诺依曼体系结构
- 2. 存储器
- 3. I/O设备
-
- 3.1 并行接口
-
- 3.1.1 51并行接口
- 3.1.2 并口应用
- 4. 51单片机
-
- 4.1 51单片机系统结构
- 4.2 51存储器和特殊功能寄存器
-
- 4.2.1 程序存储器
- 4.2.2 片内数据存储器/IO
- 4.2.3 片外数据存储器/IO
- 4.3 指令系统
-
- 4.3.1 寻址方式
- 4.4 I/O设备
-
- 4.4.1 并口及其应用
- 4.4.2 计数器类模块
- 4.4.3 中断系统模块
- 4.4.4 定时器&中断应用
- 4.4.5 串口
- 5. 名词解释
本节课程是按照冯诺依曼计算机体系结构为基础,自顶向下分析冯诺依曼体系结构的组成、优缺点、改进。并以此为基础对各个部分进行详细的介绍。
1. 冯诺依曼体系结构
核心内容
- 二进制
- 程序存储
- 5个基本组成部分
- 冯诺依曼体系结构的问题与改进
(1)冯诺依曼体系结构
冯诺依曼体系结构如下图所示:

冯诺依曼体系结构有五个组成部分:
- 运算器
- 控制器
- 存储器:数据存储器、程序存储器
- 输入设备
- 输出设备
CPU通过总线与存储器和I/O设备相关联,总线一般包括:
- 数据总线(DB)
- 地址总线(AB)
- 控制总线(CB)
CPU可以抽象为控制器+运算器,控制器由一些功能寄存器组成:
- 程序计数器PC
- 指令寄存器IR
- 通用寄存器R0,R1,…R7
输入输出设备也包含五个部分:
- 并口
- 串口
- 定时器
- 中断
- DMA
(2)程序存储与执行
指令和数据用二进制存储在存储器中。控制程序执行的有两个特殊功能寄存器:
- 程序计数器PC:存放下一条机器指令的地址。
- 指令寄存器IR:存储当前正在执行的机器指令。
机器周期是指执行一条指令需要的时间。一个机器周期的程序执行步骤分为三步:
- 取指令:按PC所指地址获取指令并存储在IR中。
- 译码:控制器翻译IR机器指令功能。
- 执行:执行IR中存储的指令。
(3)问题与优化
讨论(一)性能提高方式的总结
冯诺依曼计算机的串行性严重制约了其性能的提升空间,机器的串行性包括:
- 指令执行的串行性
- 存储空间访问的串行性
为了提升冯诺依曼计算机的运行效率,就得去解决串行性问题。我们常常可以从总线、CPU、计算机结构三个方面思考提高性能的方式。
最简单的方法就是加快机器主频,提高CPU访问存储器、执行指令的速度。 但是CPU的主频不能无限提高,因为机器的功耗会随着主频的提高而增大。 也可以通过流水线作业或多处理器并行的方法,依靠时间上的重叠提高处理效率。从总线的角度考虑,我们可以增大总线宽度提高传输数据量的大小。也可以将总线分段,各段总线独立运行实现流水线作业。从计算机结构考虑,可以引入中断机制。
讨论完冯诺依曼体系结构的基本组成以及问题和改进,接下来我们将就对剩下的两个部分“存储器”、“输入输出设备”进行细致的探讨。
2. 存储器
讨论(一)——存储器
博客园:主存、辅存、内存的区别
在计算机中,指令和数据以二进制的形式存储在存储器中。理想的寄存器应该具有容量大、速度快、价格低、体积小、非易失性等特征。对于通用计算机而言,存储层次至少应该有三级:寄存器、主存(RAM,ROM)、辅存(磁盘、固态硬盘)。存储层次按照存储器的单位成本和速度进行划分,常见的存储层次如下:

(1)存储器种类
根据存储器层次对当前流行并使用的存储器进行划分:
主存:又称内存,是CPU可以直接访问的存储空间。内存一般由半导体器件组成,包括:
-
RAM(随机存储器):可以读写的存储器。但是断电后数据就会消失。
①SRAM(静态随机存储器):速度快不需要刷新操作。
②DRAM(动态随机存储器):电容存在漏电现象,需要周期性刷新。 -
ROM(只读存储器):在制造ROM时信息就被永久写入保存。这些信息只能读出不能写入。
-
Cache(高速缓存器):在CPU和内存之间,是一个读写速度别内存更快的存储器。
-
Flash:结合了RAM和ROM的长处,不仅具备电子可擦除编程性能,还可以断电不丢失数据。
外存:此类存储器断电后仍能保存数据,且容量较大。缺点是速度较慢。
- 固态硬盘
- 磁盘
- 光盘
- U盘
当前流行和使用的存储器都没有办法满足理想存储器的性质。当前的存储器主要有以下三点问题:
-
高速度与易失、容量的矛盾
比如访问内存的速度是很快的,但是因为内存制造成本很高,难以造出具有很高容量的内存。 -
大容量与速度、成本的矛盾
-
非易失与速度、寿命的矛盾
-
存储器墙问题:当前内存的存取速度严重滞后于处理器的计算速度,内存瓶颈导致高性能处理器难以发挥出应有的功效。
介绍完了冯诺依曼体系结构以及存储器结构后,我们将以一些具体的计算机实例(51单片机、X86)等对五大组成部分进行分析了。
3. I/O设备
下面我们将通过下述五个方面对I/O设备进行分析。
- 并口
- 串口
- 定时器
- 中断
- DMA
3.1 并行接口
3.1.1 51并行接口
- 标准51有四个并行接口:P0, P1, P2, P3。
①P0, P1, P2, P3每个接口都有8个IO口,比如P0口设定
所有I/O口都可以通过软件配置为4种工作类型之一(优点:可以大大简化MCU外围电路),我们可以通过设置PxM1, PxM0的值为Px配置工作模式:
- 准双向口:PxM1 = 0, PxM0 = 0
- 推挽输出:PxM1 = 0, PxM0 = 1
- 高阻输入:PxM1 = 1, PxM0 = 0
- 开漏:PxM1 = 1, PxM0 = 1

3.1.2 并口应用
(1)应用一:LED与数码管

- 位选信号:P2.0, P2.1, P2.2
- 段选信号:P0.0~P0.7
①此图中,P0.0-A, P0.1-B, P0.2-C, P0.3-D, P0.4-E, P0.5-F, P0.6G, P0.7H

②此图中IO口与段的对应关系:a(P0.0), b(P0.1), c(P0.2), d(P0.3), e(P0.4), f(P0.5), g(P0.6), h(P0.7)。一般考察就是修改对应关系然后求出各个数字对应端口值。
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 无 |
|---|---|---|---|---|---|---|---|---|---|---|
| 0xfd | 0x60 | 0xda | 0xf2 | 0x66 | 0x96 | 0x3e | 0xe0 | 0xfe | 0xf6 | 0x00 |
0:1111 1101 = 0xfd
1:0110 0000 = 0x60
2:1101 1010 = 0xda
3:1111 0010 = 0xf2
4:0110 0110 = 0x66
5:1001 0110 = 0x96
6:0011 1110 = 0x3e
7:1110 0000 = 0xe0
8:1111 1110 = 0xfe
9:1111 0110 = 0xf6
无:0000 0000 = 0x00
- 控制开关:P2.3
①当P2.3为高电平时,LED阴极接地,可以正常显示。
②当P2.3为低电平时,LED阴极为阳,LED灯不发光。
(2)应用二:步进电机
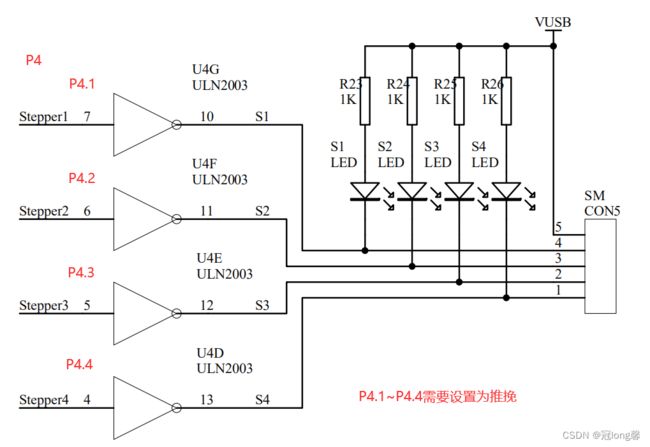
-
步进电机由P4.1~P4.4进行控制,可以通过并口4各个IO口的电压变化,使步进电机发生转动。
①P4.1~P4.4设置推挽,即P4M0 = 0x3f, P4M1 = 0xe1。 -
一相励磁方式:在每一瞬间,步进电机只有一个线圈导通。每送一个励磁信号,步进电机旋转5.625°

上面我们介绍了I/O设备之一的“并口”。接下来我们将通过学习51单片机来对I/O设备进一步的理解。
4. 51单片机
4.1 51单片机系统结构

4.2 51存储器和特殊功能寄存器
51单片机中有三个存储器:
- 程序存储器ROM
- 片内片外数据存储器SRAM
编址是给每一个单元赋予一个地址码。有两种常见的编址方法:
- 存储器与IO分别编址
- 存储器与IO统一编址
(1)51编址方式
-
分片存储器与IO统一编址
①程序存储器ROM:0~65535(FFFFh)
②片内数据存储器/IO:0~255(FFh)
③片外数据存储器/IO:0~65535(FFFFh) -
51的总线宽度为8bit
4.2.1 程序存储器

- 程序存储器是只读存储器(ROM),储存程序和固定数据,共有 2 16 = 65536 2^{16}=65536 216=65536个存储单元。
- 访问:间接访问,MOVC
- 七个特殊单元:程序存储器保存着的程序复位地址和中断服务程序入口地址。
1.程序复位地址:
①0000H:程序复位地址(单片机复位后,从0000H单元开始执行指令)
2.中断服务程序入口地址:(两个外部中断+一个串口中断+三个定时/计时器中断)
②0003H:外部中断0入口地址。
③000BH:定时/计时器0入口地址。
④0013H:外部中断1入口地址。
⑤001BH:定时/计时器1入口地址。
⑥0023H:串行口中断入口地址。
⑦002BH:定时/计时器中断入口地址(52系列)。
另外,51单片机内部的数据存储器用于存放程序执行的中间结果和过程数据。51单片机有两种数据存储器:片内RAM、片外RAM。
4.2.2 片内数据存储器/IO
(1)定义

-
大小:片内RAM共有256个字节,分为两个部分:
①低128字节
②高128字节和特殊功能寄存器区(保存特殊功能寄存器的地址)。 -
寻址:MOV
①低128字节既可以直接寻址,也可以间接寻址。
②高128字节RAM只能间接寻址。
③高128字节特殊功能寄存器区只能直接寻址。 -
低128字节RAM
①工作寄存器区:包含四组,每组包含8个工作寄存器R0~R7。
②位寻址区
③通用区 -
21个特殊功能寄存器:可以按照CPU、定时器、并口、串口、中断、电源管理这六个方面进行划分。
(2)21个特殊功能寄存器
- CPU(6个):A、B、PSW、SP、DPH、DPL

- 并口(4个):P0, P1, P2, P3
- 串口(2个):SBUF, SCON
- 定时器(6个):TCON, TMOD, TH1, TL1, TH0, TL0
- 中断(2个):IE, IP
- 电源管理(1个):PCON
特殊功能寄存器的有些位赋予了位名称,有些赋予了位地址。只有那些有位地址的位才能进行位操作。
在后面我们回对片内IO资源相关的寄存器进行一一分析。这里只需要记住21个SFR就可以了。
4.2.3 片外数据存储器/IO

- 大小:共有65536个字节(0~FFFFh)。
- 寻址:间接寻址,MOVX
- 系统可扩展的片外资源:可以根据51总线规则,对系统进行各种扩展。
这样,我们就把51单片机的结构和存储器部分介绍完了。存储器部分包括程序存储器和数据存储器(片内RAM/IO、片外RAM/IO),其中51单片机采用存储器和IO统一编址。程序存储器共有FFFFh(65536)个字节,其中包括了7个特殊的单元用于存储程序复位和中断服务程序地址。片内RAM包含FF(256)个字节,其中低128个字节是既可以间接访问也可以直接访问的数据存储RAM,它包括工作寄存器区、位寻址区、通用区三个部分。高128位是只能间接访问的数据RAM和只能直接访问的SFR区。在标准51单片机中有21种特殊功能寄存器(A,B,PSW,SP,DPH,DPL,P0,P1,P2,P3,SBUF,SCON,TMOD,TCON,TH1,TL1,TH0,TL0,IE,IP,PCON)。接下来我们就会对这些IO设备以及他们的特殊功能寄存器进行介绍。
4.3 指令系统
(1)伪指令
- 伪指令是对汇编过程进行控制的指令。
- 常见的伪指令如下表所示:

(2)数据存储方式
- 大端存储:高位数据存储在较小存储器地址,低位数据存储在较大存储器地址(符合正常数据观察形式,从左到右)。
- 小端存储:低位数据存储在较小存储器地址,高位数据存储在较大存储器地址。
4.3.1 寻址方式
51单片机有六种寻址方式:
-
立即数寻址:在指令集中直接给出参加运算的操作数,操作数用#标识。
①MOV A, #70H:将立即数70H传送到累加器A中 -
直接寻址:只能用来表示特殊功能寄存器、内部数据寄存器、位地址空间。
①MOV 70H, #48:将立即数存放在70H单元里。 -
间接寻址:采用R0或R1或DPTR前添加@表示。
①MOV A, @R1:假设R1中的数据是40H,则是将存放在40H单元的数据传送到累加器。 -
寄存器寻址:对选定的工作寄存器R0~R7、累加器A、通用寄存器B、地址寄存器和进位C中的数进行操作。
①MOV A, R3:将R3中的数据传送到累加器。
②对比间接寻址和寄存器寻址 -
相对寻址:将程序计数器PC的值设为转移指令的转移地址。
①CJNE A, #30, 20H:判断累加器中的数值与30H是否相等。若不相等下一指令的地址相当于当前地址跳过20个单元。 -
变址寻址:偏移量与变址基址相加,结果作为操作数的地址。
①MOVC A, @A+DPTR:累加器为偏移量寄存器,与地址寄存器DPTR内容相加。结果作为操作数的地址,取出地址单元送给累加器A。
特别注意以下内容:
- 立即数寻址时需要使用到#
- 间接寻址时需要添加@,且只有三个寄存器R0,R1,DPTR可以用于间接寻址。
51单片机指令系统一共有五类指令:数据传输(29)、算术运算(24)、逻辑运算(24)、程序转移(17)、位操作(17)。具体指令不在这里展开,完整的指令集可以参照《STC15系列数据手册_2021版》。
4.4 I/O设备
I/O设备主要有五种类型组成:并口、串口、定时器/计数器、中断系统、DMA

核心功能
- 并口模块:引脚电平与部分寄存器内容相对应。
- 计数器类模块:含有一个计数器寄存器。
4.4.1 并口及其应用
==并口属于I/O模块,在CPU看来是可以访问的寄存器单元。
(1)定义
- 标准51有四个并行接口:P0, P1, P2, P3。
①P0, P1, P2, P3每个接口都有8个IO口,比如P0口设定 - 核心功能:引脚电平与寄存器内容对应。
(2)工作模式
所有I/O口都可以通过软件配置为4种工作类型之一(优点:可以大大简化MCU外围电路),我们可以通过设置PxM1, PxM0的值为Px配置工作模式:
- 准双向口:PxM1 = 0, PxM0 = 0
- 推挽输出:PxM1 = 0, PxM0 = 1
- 高阻输入:PxM1 = 1, PxM0 = 0
- 开漏:PxM1 = 1, PxM0 = 1
(3)应用一:LED与数码管
- 位选信号:P2.0, P2.1, P2.2
- 段选信号:P0.0~P0.7
①此图中,P0.0-A, P0.1-B, P0.2-C, P0.3-D, P0.4-E, P0.5-F, P0.6G, P0.7H
②此图中IO口与段的对应关系:a(P0.0), b(P0.1), c(P0.2), d(P0.3), e(P0.4), f(P0.5), g(P0.6), h(P0.7)。一般考察就是修改对应关系然后求出各个数字对应端口值。
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 无 |
|---|---|---|---|---|---|---|---|---|---|---|
| 0xdf | 0x06 | 0xad | 0x2f | 0x66 | 0x69 | 0xe3 | 0x0e | 0xef | 0x6f | 0x00 |
0:1101 1111 = 0xdf
1:0000 0110 = 0x06
2:1010 1101 = 0xad
3:0010 1111 = 0x2f
4:0110 0110 = 0x66
5:0110 1001 = 0x69
6:1110 0011 = 0xe3
7:0000 1110 = 0x0e
8:1110 1111 = 0xef
9:0110 1111 = 0x6f
无:0000 0000 = 0x00
- 控制开关:P2.3
①当P2.3为高电平时,LED阴极接地,可以正常显示。
②当P2.3为低电平时,LED阴极为阳,LED灯不发光。
(4)应用二:步进电机
-
步进电机由P4.1~P4.4进行控制,可以通过并口4各个IO口的电压变化,使步进电机发生转动。
①P4.1~P4.4设置推挽,即P4M0 = 0x3f, P4M1 = 0xe1。 -
一相励磁方式:在每一瞬间,步进电机只有一个线圈导通。每送一个励磁信号,步进电机旋转5.625°
4.4.2 计数器类模块
51单片机有多种计数器类功能模块,比如:定时器、计数器、计时器、PWM、看门狗、波特率发生器等。他们的特点是都内含一个计数器。
(1)理解
- 在CPU看来,是若干可以访问的存储器单元。
- 核心功能:含有一个计数器寄存器。
- 另有部分寄存器用于辅助配指等目的。
(2)定义

- 两个定时器/计数器:T0, T1(对并口P3.4, P3.5的复用)
- 六个特殊功能寄存器:分为数据、方式控制和运行状态三类。
①TMOD:方式控制特殊功能寄存器。
②TCON:运行状态特殊功能寄存器
③TH1:T1计数器(高8位)
④TL1:T1计数器(低8位)
⑤TH0:T0计数器(高8位)
⑥TL0:T0计数器(低8位)
下面我们将对这些特殊功能寄存器以及一些辅助控制寄存器进行学习。
(3)TMOD

-
T1由TMOD高4位控制,T0由TMOD低4位控制。
-
C/T:设置定时器/计数器工作模式
①C/T=0:对内部及其时钟计数,定时方式。
②C/T=1:对外部引脚脉冲计数,计数方式。 -
GATE:设置定时器/计数器控制方式
①GATE=0时,运行只由软件控制。
②GATE=1时,运行同时由硬件控制。 -
M1M0:定时/计数器的操作模式

-
蜂鸣器:假设使用T1实现蜂鸣器时,TMOD初始值设为:TMOD = TMOD & 0x0F。
①采用16位自动重载模式,M1M0=00。
②采用定时方式,C/T=0。
③不需要受硬件控制,GATE=0。
(4)TCON

-
T1, T0的运行控制和状态由TCON中位控制。
-
TF1:T1溢出中断标志。
①TF1=1,定时器/计数器T1溢出,产生T1中断。
②TF1=0,未溢出。
③初始化操作时,令TF1=0。 -
TR1:T1运行控制位。
①TR1=1,允许T1开始计时。
②TR1=0,禁止T1计时。 -
蜂鸣器:假设使用T1实现蜂鸣器时,需要进行如下初始化:
①清零T1中断标志位,TF1=0。
②允许T1开始计时,TR1=1。
(5)AUXR

- T0X12:速度控制位
①T0X12=0,T0为12T模式。
②T0X12=1,T0为T模式。
综上所述,我们介绍了TMOD, TCON, AUXR三种寄存器。在实际配置中,我们需要先设置TMOD和AUXR中的定时器/计数器模式后,在通过TCON打开定时器/计数器。
4.4.3 中断系统模块
中断提供了对异常事件的响应机制,提高了计算机的实时性。
(1)定义
-
两个特殊功能寄存器
①IE:中断允许寄存器
②IP:中断优先级控制寄存器 -
五个中断源
外部中断源:
①INT0:外部中断0(与P3.2复用)
②INT1:外部中断1(与P3.3复用)
内部中断源:
①T0:定时器0溢出中断
②T1:定时器1溢出中断
③TI, RI:串行通信
(2)IE

- ET1, ET0:定时器/计数器溢出中断允许位。
①ET1=1,允许定时器/计时器1中断。
②ET1=0,禁止定时器/计时器1中断。 - EX1, EX0:外部中断允许位。
①EX1=1,允许外部中断1中断。
②EX1=0,禁止外部中断1中断。 - ES:串口1中断允许位。
(3)IP


4.4.4 定时器&中断应用
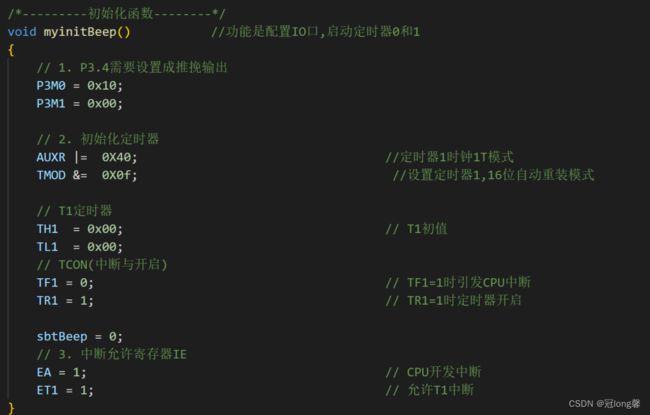
(1)应用一:蜂鸣器

- 原理:输入音频脉冲通过周期性的01变化,挤压蜂鸣器内空气产生蜂鸣声。
- 初始化设置
①并口推挽设置:
将P3.4设置成推挽输出,因此令P3M1=0X00, P3M0=0X10.
②定时器T1设置
将T1设置为16位自动重载的定时器模式,因此TMOD= TMOD & 0x0f。
将T1速度控制设为1T模式,令T1X12=1。
允许T1计时并将溢出位清零,令TF1=0, TR1=1.
③中断设置
CPU开放中断,并允许接收T1溢出中断。
EA=1, ET1=1。
(2)应用二:按键响应

- 端口控制:KEY1, KEY2, KEY3分别由P3.2, P3.3, P1.7控制。
- 原理:在未按下按键时,三个端口保持高电平。当按下按键后,电路接地,并口保持低电平。
- 消抖方法:因为在按下按键后,端口电平不会像理想一样保持0电位。而是在01之间频繁波动。因此需要多次检测实现高低电平的判断。
①可以1ms对按键电平状态进行一次检测。检测达到30次后,判断低电平比例是否达到2/3。若达到了就表示为低电平,否则表示为高电平。

4.4.5 串口
(1)定义

- 核心功能:含有与外部系统交换数据的数据寄存器。
- 两个特殊功能寄存器:分为模式方式、数据、状态控制三类。
①SCON:串行控制寄存器。
②SBUF:串行数据缓冲寄存器。
③PCON:波特率选择寄存器。
(2)常见的串行总线接口
- UART:异步收发传输器,将并口输入信号转化为串口输出信号。
- USB:通用串行总线。
在现代计算机中,UART已经被USB所取代。 - SPI:串行外设接口,是一种用于芯片的同步的,全双工的通信总线,并且在芯片的管脚上只占用四根线。
- I2C:一种双向二线同步串行总线。
(3)串行数据传输方式
有三种串行数据传输方式,根据方向和传输顺序可以分为:
- 单工:只支持单方向的数据传输。

- 全双工:支持数据同时双向传输。

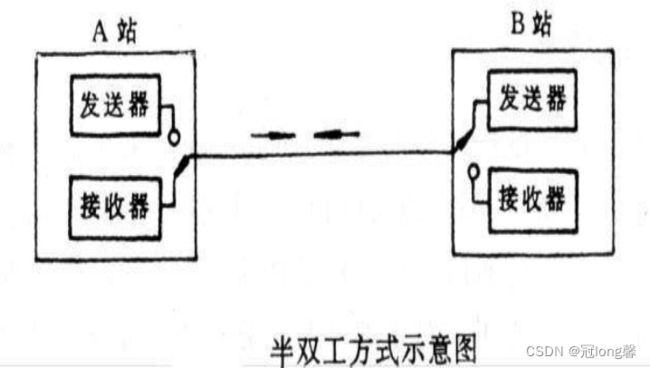
- 半双工:支持双向传输,但不支持同时双向传输。

(4)波特率
- 定义:单位时间内传送二进制数据的位数(b/S)。
- 举例:波特率为9600时每秒能够发送多少个字节?
理解:960个字节。因为传送一个字节需要两个比特作为开始位和停止位,因此一个字节的实际比特大小为10比特。因此9600波特率每秒能够传送9600/10=960字节。 - 波特因子:接收/发送一位所需的时钟个数。
①一般同步取1,异步取16.
(5)同步与异步通信
-
同步串行通信:发送方和接收方共用一个时钟信号。
①不需要约定波特率,波特率因子为1.
②无累计误差,一次可以传输一个数据块。 -
异步串行通信:发送方和接收方有自己的时钟信号,时钟信号不需传送。
①需要事先约定波特率。
②双方时钟可能存在累计误差,因此异步通信常以字节为单位进行通信。
(6)串行通信协议——MCS51
串行通信协议需要约定6个方面的内容:同步方式、通信速度、检错纠错方式、数据格式、信号电平、控制信号/字符等。
(6.1)同步方式
- 全双工异步串行口UART:异步通信
(6.2)基本信号
- 发送:TX, TXD
- 接收:RX, RXD
其中TX与RX交叉相连,TXD与RXD交叉相连。
(6.3) 常用信号电平
- RS485
① V A − V B > 0.2 V V_A-V_B >0.2V VA−VB>0.2V时为高电平1.
② V A − V B < − 0.2 V V_A-V_B <-0.2V VA−VB<−0.2V时为低电平0.
③优点:差分信号,抗干扰能力强。

(6.4)数据格式
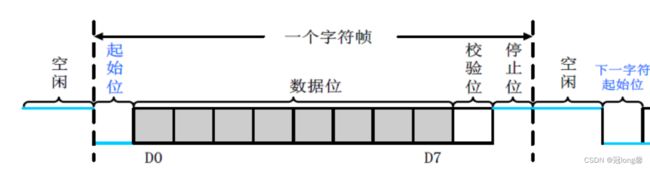
- RS485起始位(1位):有效的0表示数据开始传输。
- 数据位(8位)
- 奇偶校验位(1位,可无)
- RS485停止位(1位):空闲或者停止位表示为1.

因此“9600,8,n,1”表示波特率9600bps,8个数据位,无奇偶校验,1个停止位。
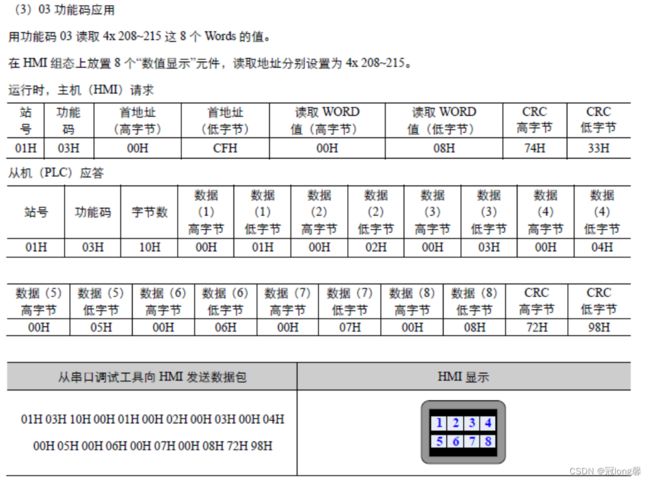
(7)ModBus RTU协议
-
通信基本格式:1字节设备地址 + 1字节功能码 + N字节数据 + 2字节CRC校验码。
-
01,02功能:读线圈n个bit。

-
03,04功能:读寄存器n个字。
-
05,06功能:写线圈1个bit、写寄存器1个字。

-
问题:因为每次通信都由上位机发起和总线访问控制的方式导致。
①通信效率低。
②实时性差。
③网络容错性差。
5. 名词解释
(1)存储器(内存)
- ROM:只读存储器
- RAM:随机存储器
- SRAM:静态随机存储器
①只要保持通电存储的数据就可以保持。
②速度快不需要刷新操作。
③体积较大,集成度低,功耗大。 - DRAM:动态随机存储器
①只能将数据保持很短的时间。
②需要周期性刷新。
③体积较小,集成度高,功耗小。 - SDRAM:同步动态存储器
- DDR:双倍速率同步动态存储器
- SRAM:静态随机存储器
- FLASH:闪存
①结合了RAM和ROM的长处,不仅具备电子可擦除可编程,还能使数据不会因为断电而丢失。
②应用:U盘、MP3 - NOR FLASH:intel开发出的闪存技术。
- NAND FLASH:东芝公司开发的闪存技术。
(2)单片机
- ISP(In System Programing):在系统编程。
①指在板机上可编程而不用对芯片进行拆卸 - IAP(In Application Programing):在应用编程。
①在应用程序正在运行时也可以编程,可以实现软件远程升级。 - OPT
- MCU(Microcontroller Unit):微控制单元,又称单片机。
- DSP(Digital Signal Processing):数字信号处理。
- SOC(System on Chip):系统级芯片。是一个有专用目的的集成电路。
- RISC(Reduced Instruction Set Computer):精简指令集计算机。是一种执行较少计算机指令的微处理器。
- CISC(Complex Instruction Set Computer):复杂指令集计算机。
- ARM(Advanced RISC Manchine):第一款RISC微处理器,本身是32位设计。
- STC:32位8051单片机。
(3)计算机
- CPU(Central Processing Unit):中央处理器,由运算器和控制器两部分组成。
- BUS:总线,是CPU, 内存,输入输出设备交换信息的公用通道。
- AB:地址总线
- CB::控制总线
- DB:数据总线
- DMA(Direct Memory Access):直接存储器访问。
①允许不同速度的硬件通信,而不依赖于CPU大量中断。 - BSP(Board Support Package):板级支持包。是所有硬件相关代码的集合。
- API(Application Programming Interface):应用程序编程接口,提供应用程序与开发人员访问一组历程的能力。
- BootLoader:嵌入式系统在加电后执行的第一段代码。
- BOIS(Basic Output Input System):基本输入输出系统,固化在ROM芯片上的程序。保存着基本输入输出程序、开机自检和自启动程序。
- OS(Operating System):操作系统。
- RTOS(Real Time OS):即时操作系统。
- ROS:适用于机器人的操作系统。
- GPIO(General-Purpose iput/output):通用输入输出系统。类似于8051的P0-P3并口。
- Timer:定时器/计时器。
- Clock:计时函数。
- RTC(Real Time Clock):实时时钟。
- PCA(Programmable Counter Array):可编程计数阵列。与标准51计数器相比,它需要较少的CPU干预。
- WDT(Wathdog Timer):看门狗,是一个定时器电路。
- PWM(Pulse Width Modulation):脉宽调制。是一种对模拟信号进行数字编码的方法。