voronoi diagram(泰森多边形) 应用 - Good Manners
欢迎关注更多精彩
关注我,学习常用算法与数据结构,一题多解,降维打击。
voronoi 图求解点击前往
题目链接:https://vjudge.net/problem/URAL-1504
题目大意
有一个桌子,形状是圆形。
桌上放着很多蛋糕,每个蛋糕有大小。
人可以坐在桌子边缘的任意位置,坐下后可以拿离自己最近的一块蛋糕,求坐在哪个位置可以拿到尽可能大的蛋糕。
思考&分析
先求出每个蛋糕所在voronoi区域。
查看区域与圆有没有交点。
遍历有交点的蛋糕,选择可以拿到最大蛋糕的交点。
算法细节
1)判断区域与圆有交
可以求出区域所有顶点,判断有没有顶点在圆上或外面。
2)直线与圆求交
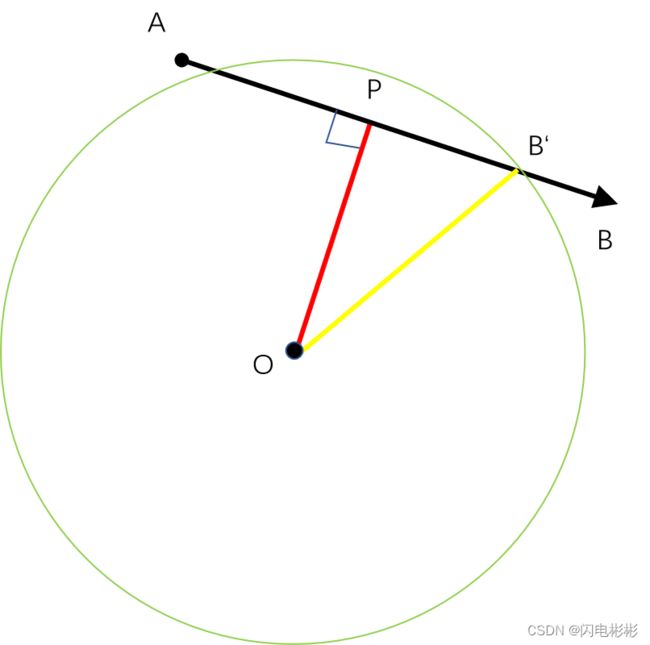
可以利用投影先求到P点,利用直角三角形可知PB’长度
从P点沿AB方向就可以得到B’坐标,同理,反向还有一个交点。
3)特殊情况
只有2个蛋糕或者所有蛋糕在一条线上时,不能进行三角化。
此时,选择最大的蛋糕,作垂线与圆求交点即可。
算法过程
step 1 对边界点进行delaunay三角化
step 2 遍历每个边界点,收集邻边,并按照逆时针排序。
求解出每个邻边的中垂线,分别与边界和其他中垂线求交(邻近的中垂线才有交点)判断是否与圆有交集
step 3 求解与圆的交点,并判断交点是否在voronoi区域内。
step 4 选取可以拿到最大蛋糕的位置点
代码
#include
#include 本人码农,希望通过自己的分享,让大家更容易学懂计算机知识。创作不易,帮忙点击公众号的链接。
