基于 golang 从零到一实现时间轮算法 (二)
Go实现单机版时间轮
上一章介绍了时间轮的相关概念,接下来我们会使用 golang 标准库的定时器工具 time ticker 结合环状数组的设计思路,实现一个单机版的单级时间轮。
首先我们先运行一下下面的源码,看一下如何使用。
https://github.com/xiaoxuxiansheng/timewheel
package main
import (
"container/list"
"fmt"
"sync"
"time"
)
type taskElement struct {
task func()
pos int
cycle int
key string
}
type TimeWheel struct {
sync.Once
interval time.Duration
ticker *time.Ticker
stopc chan struct{}
addTaskCh chan *taskElement
removeTaskCh chan string
slots []*list.List
curSlot int
keyToETask map[string]*list.Element
}
func NewTimeWheel(slotNum int, interval time.Duration) *TimeWheel {
if slotNum <= 0 {
slotNum = 10
}
if interval <= 0 {
interval = time.Second
}
t := TimeWheel{
interval: interval,
ticker: time.NewTicker(interval),
stopc: make(chan struct{}),
keyToETask: make(map[string]*list.Element),
slots: make([]*list.List, 0, slotNum),
addTaskCh: make(chan *taskElement),
removeTaskCh: make(chan string),
}
for i := 0; i < slotNum; i++ {
t.slots = append(t.slots, list.New())
}
go t.run()
return &t
}
func (t *TimeWheel) Stop() {
t.Do(func() {
t.ticker.Stop()
close(t.stopc)
})
}
func (t *TimeWheel) AddTask(key string, task func(), executeAt time.Time) {
pos, cycle := t.getPosAndCircle(executeAt)
t.addTaskCh <- &taskElement{
pos: pos,
cycle: cycle,
task: task,
key: key,
}
}
func (t *TimeWheel) RemoveTask(key string) {
t.removeTaskCh <- key
}
func (t *TimeWheel) run() {
defer func() {
if err := recover(); err != nil {
// ...
}
}()
for {
select {
case <-t.stopc:
return
case <-t.ticker.C:
t.tick()
case task := <-t.addTaskCh:
t.addTask(task)
case removeKey := <-t.removeTaskCh:
t.removeTask(removeKey)
}
}
}
func (t *TimeWheel) tick() {
list := t.slots[t.curSlot]
defer t.circularIncr()
t.execute(list)
}
func (t *TimeWheel) execute(l *list.List) {
// 遍历每个 list
for e := l.Front(); e != nil; {
taskElement, _ := e.Value.(*taskElement)
if taskElement.cycle > 0 {
taskElement.cycle--
e = e.Next()
continue
}
// 执行任务
go func() {
defer func() {
if err := recover(); err != nil {
// ...
}
}()
taskElement.task()
}()
// 执行任务后,从时间轮中删除
next := e.Next()
l.Remove(e)
delete(t.keyToETask, taskElement.key)
e = next
}
}
func (t *TimeWheel) getPosAndCircle(executeAt time.Time) (int, int) {
delay := int(time.Until(executeAt))
cycle := delay / (len(t.slots) * int(t.interval))
pos := (t.curSlot + delay/int(t.interval)) % len(t.slots)
return pos, cycle
}
func (t *TimeWheel) addTask(task *taskElement) {
list := t.slots[task.pos]
if _, ok := t.keyToETask[task.key]; ok {
t.removeTask(task.key)
}
eTask := list.PushBack(task)
t.keyToETask[task.key] = eTask
}
func (t *TimeWheel) removeTask(key string) {
eTask, ok := t.keyToETask[key]
if !ok {
return
}
delete(t.keyToETask, key)
task, _ := eTask.Value.(*taskElement)
_ = t.slots[task.pos].Remove(eTask)
}
func (t *TimeWheel) circularIncr() {
t.curSlot = (t.curSlot + 1) % len(t.slots)
}
func main() {
timeWheel := NewTimeWheel(10, 500*time.Millisecond)
defer timeWheel.Stop()
fmt.Println(time.Now())
timeWheel.AddTask("test1", func() {
fmt.Printf("test1, %v\n", time.Now())
}, time.Now().Add(time.Second))
timeWheel.AddTask("test2", func() {
fmt.Printf("test2, %v\n", time.Now())
}, time.Now().Add(5*time.Second))
timeWheel.AddTask("test2", func() {
fmt.Printf("test2, %v\n", time.Now())
}, time.Now().Add(3*time.Second))
<-time.After(10 * time.Second)
}
运行结果如下:
2023-11-03 13:02:57.042834 +0800 CST m=+0.000173292
test1, 2023-11-03 13:02:58.043555 +0800 CST m=+1.000891376
test2, 2023-11-03 13:03:00.043567 +0800 CST m=+3.000897126
结果说明,首先添加test1任务定时1秒钟,test2任务定时5秒钟,但后续修改了test2定时为3秒钟,所以输出test1和test2的时间差为2秒钟。
数据结构
在对时间轮的类定义中,核心字段如下图所示:
type TimeWheel struct {
sync.Once
interval time.Duration
ticker *time.Ticker
stopc chan struct{}
addTaskCh chan *taskElement
removeTaskCh chan string
slots []*list.List
curSlot int
keyToETask map[string]*list.Element
}
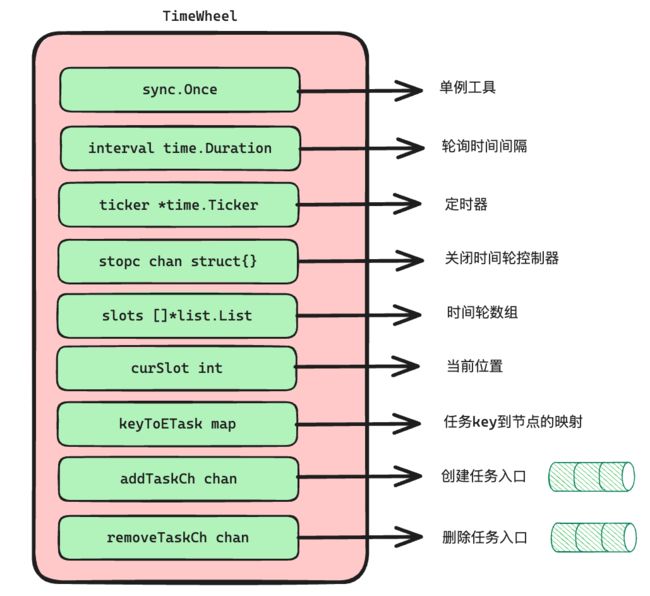
在几个核心字段中:
- slots——类似于时钟的表盘
- curSlot——类似于时钟的指针
- ticker 是使用 golang标准库的定时器工具,类似于驱动指针运转的齿轮
在创建时间轮实例时,会通过一个异步的常驻 goroutine 执行定时任务的检索、添加、删除等操作,并通过几个 channel 进行 goroutine 的执行逻辑和生命周期的控制:
- stopc:用于停止 goroutine
- addTaskCh:用于接收创建定时器指令
- removeTaskCh:用于接收删除定时任务的指令
此处有几个技术细节需要提及:
首先:所谓环状数组指的是逻辑意义上的. 在实际的实现过程中,会通过一个定长数组结合循环遍历的方式,来实现这个逻辑意义上的“环状”性质.(有点类似于上一章提到的cycle)
其次:数组每一轮能表达的时间范围是固定的. 每当在添加添加一个定时任务时,需要根据其延迟的相对时长推算出其所处的 slot 位置,其中可能跨遍历轮次的情况,这时候需要额外通过定时任务中的 cycle 字段来记录这一信息,避免定时任务被提前执行.
最后:时间轮中一个 slot 可能需要挂载多笔定时任务,因此针对每个 slot,需要采用 golang 标准库 container/list 中实现的双向链表进行定时任务数据的存储.

定时任务
我们现在先看一笔任务的结构体介绍:
// 封装了一笔定时任务的明细信息
type taskElement struct {
// 内聚了定时任务执行逻辑的闭包函数
task func()
// 定时任务挂载在环状数组中的索引位置
pos int
// 定时任务的延迟轮次. 指的是 curSlot 指针还要扫描过环状数组多少轮,才满足执行该任务的条件
cycle int
// 定时任务的唯一标识键
key string
}
-
task func(): 这是一个函数类型的字段,它引用了一个闭包。闭包是一种匿名函数,能够捕获到其外部作用域中的变量。在这里,task字段代表着定时任务的执行逻辑本身。当定时器触发时,这个闭包会被执行。这样设计可以让taskElement持有执行任务所需要进行的任何操作,使任务逻辑高度内聚和独立。
-
pos int: 该字段表示任务在环形数组(通常用于实现时间轮定时器)中的位置索引。环形数组是时间轮算法中的一种数据结构,用来表示时间的流逝。pos就是这个任务在这个环中的具体位置,当时间轮的指针指向这个位置时,就意味着这个taskElement代表的定时任务可能需要被执行。
-
cycle int: 在时间轮算法中,cycle用于表示任务延迟的轮次数。时间轮有一个当前指针curSlot,每当curSlot遍历一次完整的环形数组,所有任务的cycle值都会减1。一个任务的cycle值指示了curSlot需要再经过多少完整的遍历,该任务才会被执行。当cycle为0时,表示定时任务在当前轮次达到了执行条件。
-
key string: 这个字段是每个定时任务的唯一标识。key的存在允许任务在全局范围内被唯一标识和引用。这意味着你可以使用这个key来查询或者操作特定的定时任务,比如更新任务的延迟时间、取消任务或者是在任务被执行之前获取任务的状态。
综上所述,taskElement结构体将一个定时任务的执行逻辑、在时间轮中的位置、剩余的延迟轮次以及唯一标识符组合在一起,为定时任务的调度提供了必要的信息。

构造器
在创建时间轮的构造器函数中,需要传入两个入参:
- slotNum:由使用方指定 slot 的个数,默认为 10
- interval:由使用方指定每个 slot 对应的时间范围,默认为 1 秒
初始化时间轮实例的过程中,会完成定时器 ticker 以及各个 channel 的初始化,并针对数组 中的各个 slot 进行初始化,每个 slot 位置都需要填充一个 list.
每个时间轮实例都会异步调用 run 方法,启动一个常驻 goroutine 用于接收和处理定时任务.
// 创建单机版时间轮 slotNum——时间轮环状数组长度 interval——扫描时间间隔
func NewTimeWheel(slotNum int, interval time.Duration) *TimeWheel {
// 环状数组长度默认为 10
if slotNum <= 0 {
slotNum = 10
}
// 扫描时间间隔默认为 1 秒
if interval <= 0 {
interval = time.Second
}
// 初始化时间轮实例
t := TimeWheel{
interval: interval,
ticker: time.NewTicker(interval),
stopc: make(chan struct{}),
keyToETask: make(map[string]*list.Element),
slots: make([]*list.List, 0, slotNum),
addTaskCh: make(chan *taskElement),
removeTaskCh: make(chan string),
}
for i := 0; i < slotNum; i++ {
t.slots = append(t.slots, list.New())
}
// 异步启动时间轮常驻 goroutine
go t.run()
return &t
}
构造函数比较简单,由于异步run启动时间轮常驻 goroutine,所以我们现在看看run方法。
启动
时间轮运行的核心逻辑位于 timeWheel.run 方法中,该方法会通过 for 循环结合 select 多路复用的方式运行,属于 golang 中非常常见的异步编程风格.
goroutine 运行过程中需要从以下四类 channel 中接收不同的信号,并进行逻辑的分发处理:
- stopc:停止时间轮,使得当前 goroutine 退出
- ticker:接收到 ticker 的信号说明时间由往前推进了一个 interval,则需要批量检索并执行当前 slot 中的定时任务. 并推进指针 curSlot 往前偏移
- addTaskCh:接收创建定时任务的指令
- removeTaskCh:接收删除定时任务的指令
此处值得一提的是,后续不论是创建、删除还是检索定时任务,都是通过这个常驻 goroutine 完成的,因此在访问一些临界资源的时候,不需要加锁,因为不存在并发访问的情况
// 运行时间轮
func (t *TimeWheel) run() {
defer func() {
if err := recover(); err != nil {
// ...
}
}()
// 通过 for + select 的代码结构运行一个常驻 goroutine 是常规操作
for {
select {
// 停止时间轮
case <-t.stopc:
return
// 接收到定时信号
case <-t.ticker.C:
// 批量执行定时任务
t.tick()
// 接收创建定时任务的信号
case task := <-t.addTaskCh:
t.addTask(task)
// 接收到删除定时任务的信号
case removeKey := <-t.removeTaskCh:
t.removeTask(removeKey)
}
}
}
停止
时间轮提供了一个 Stop 方法,用于手动停止时间轮,回收对应的 goroutine 和 ticker 资源.
停止时间轮的操作是通过关闭 stopc channel 完成的,由于 channel 不允许被反复关闭,因此这里通过 sync.Once 保证该逻辑只被调用一次.
// 停止时间轮
func (t *TimeWheel) Stop() {
// 通过单例工具,保证 channel 只能被关闭一次,避免 panic
t.Do(func() {
// 定制定时器 ticker
t.ticker.Stop()
// 关闭定时器运行的 stopc
close(t.stopc)
})
}
创建任务
创建一笔定时任务的核心步骤如下:
- 使用方往 addTaskCh 中投递定时任务,由常驻 goroutine 接收定时任务
- 根据执行时间,推算出定时任务所处的 slot 位置以及需要延迟的轮次 cycle
- 将定时任务包装成一个 list node,追加到对应 slot 位置的 list 尾部
- 以定时任务唯一键为 key,list node 为 value,在 keyToETask map 中建立映射关系,方便后续删除任务时使用
我们首先看一下源码,然后再看相应的图解。
AddTask
// 添加定时任务到时间轮中
func (t *TimeWheel) AddTask(key string, task func(), executeAt time.Time) {
// 根据执行时间推算得到定时任务从属的 slot 位置,以及需要延迟的轮次
pos, cycle := t.getPosAndCircle(executeAt)
// 将定时任务通过 channel 进行投递
t.addTaskCh <- &taskElement{
pos: pos,
cycle: cycle,
task: task,
key: key,
}
}
pos, cycle := t.getPosAndCircle(executeAt): 这行代码调用了TimeWheel的另一个方法getPosAndCircle,传入期望执行的时间executeAt。这个方法计算出任务应该放置在时间轮的哪个槽位上(pos),以及在任务第一次执行前,时间轮需要转过多少完整的圈数(cycle)。
t.addTaskCh <- &taskElement{: 这是Go语言的通道(channel)操作。它创建了一个taskElement结构体实例,并通过TimeWheel中的addTaskCh通道发送出去。这种方式通常用于跨goroutine的安全通信,意味着AddTask方法将定时任务提交到另一个可能在不同goroutine中运行的执行上下文。
- pos: pos,: 设置taskElement的pos字段,表示这个任务在时间轮的哪一个位置。
- cycle: cycle,: 设置taskElement的cycle字段,表示任务在能被执行前时间轮需要转动多少圈。
- task: task,: 将外部传入的任务闭包task赋给taskElement。
- key: key,: 将任务的唯一标识符key赋给taskElement。
getPosAndCircle
// 根据执行时间推算得到定时任务从属的 slot 位置,以及需要延迟的轮次
func (t *TimeWheel) getPosAndCircle(executeAt time.Time) (int, int) {
delay := int(time.Until(executeAt))
// 定时任务的延迟轮次
cycle := delay / (len(t.slots) * int(t.interval))
// 定时任务从属的环状数组 index
pos := (t.curSlot + delay/int(t.interval)) % len(t.slots)
return pos, cycle
}
为了举例说明这个函数如何工作,我们需要设定一些参数:
- 假设时间轮TimeWheel的slots有60个槽位,代表一分钟内的每一秒(len(t.slots) = 60)。
- 时间轮的每个槽位对应1秒钟(t.interval = 1秒)。
- 假设当前时间轮的指针curSlot在第0槽位上(t.curSlot = 0),这通常表示整点时刻。
- 设定一个将来的时间点executeAt,假设这个时间点是从现在开始的第62秒后。这意味着我们希望在1分钟2秒后执行任务(delay = 62秒)。
// 从现在开始到执行时间的延迟时间(秒)
delay := int(time.Until(executeAt)) // delay = 62
// 计算定时任务需要经过的完整时间轮循环数
cycle := delay / (len(t.slots) * int(t.interval))
// cycle = 62 / (60 * 1) = 1.033,向下取整为 1
// 计算定时任务应该位于的槽位(数组index)
pos := (t.curSlot + delay/int(t.interval)) % len(t.slots)
// pos = (0 + 62/1) % 60 = 62 % 60 = 2
所以,函数getPosAndCircle将会返回(2, 1):
假设时间轮有5个槽位,每个槽位间隔为1秒,并且当前槽位(curSlot)为0。我们需要计算延迟0到11秒的任务对应的槽位(pos)和轮次(cycle)。
- 延迟0秒:槽位0,轮次0
- 延迟1秒:槽位1,轮次0
- 延迟2秒:槽位2,轮次0
- 延迟3秒:槽位3,轮次0
- 延迟4秒:槽位4,轮次0
- 延迟5秒:槽位0,轮次1
- 延迟6秒:槽位1,轮次1
- 延迟7秒:槽位2,轮次1
- 延迟8秒:槽位3,轮次1
- 延迟9秒:槽位4,轮次1
- 延迟10秒:槽位0,轮次2
- 延迟11秒:槽位1,轮次2
现在看一下执行过程。
addTask
// 常驻 goroutine 接收到创建定时任务后的处理逻辑
func (t *TimeWheel) addTask(task *taskElement) {
// 获取到定时任务从属的环状数组 index 以及对应的 list
list := t.slots[task.pos]
// 倘若定时任务 key 之前已存在,则需要先删除定时任务
if _, ok := t.keyToETask[task.key]; ok {
t.removeTask(task.key)
}
// 将定时任务追加到 list 尾部
eTask := list.PushBack(task)
// 建立定时任务 key 到将定时任务所处的节点
t.keyToETask[task.key] = eTask
}

倘若定时任务 key 之前已存在,则需要先删除定时任务,然后重新添加到末尾。这张图很详细的说明执行的过程了。
删除任务
删除一笔定时任务的核心步骤如下:
- 使用方往 removeTaskCh 中投递删除任务的 key,由常驻 goroutine 接收处理
- 从 keyToETask map 中,找到该任务对应的 list node
- 从 keyToETask map 中移除该组 kv 对
- 从对应 slot 的 list 中移除该 list node
// 删除定时任务,投递信号
func (t *TimeWheel) RemoveTask(key string) {
t.removeTaskCh <- key
}
// 时间轮常驻 goroutine 接收到删除任务信号后,执行的删除任务逻辑
func (t *TimeWheel) removeTask(key string) {
eTask, ok := t.keyToETask[key]
if !ok {
return
}
// 将定时任务节点从映射 map 中移除
delete(t.keyToETask, key)
// 获取到定时任务节点后,将其从 list 中移除
task, _ := eTask.Value.(*taskElement)
_ = t.slots[task.pos].Remove(eTask)
}

执行定时任务
最后来捋一下最核心的链路——检索并批量执行定时任务的流程.
首先,每当接收到 ticker 信号时,会根据当前的 curSlot 指针,获取到对应 slot 位置挂载的定时任务 list,调用 execute 方法执行其中的定时任务,最后通过 circularIncr 方法推进 curSlot 指针向前移动。
// 常驻 goroutine 每次接收到定时信号后用于执行定时任务的逻辑
func (t *TimeWheel) tick() {
// 根据 curSlot 获取到当前所处的环状数组索引位置,取出对应的 list
list := t.slots[t.curSlot]
// 在方法返回前,推进 curSlot 指针的位置,进行环状遍历
defer t.circularIncr()
// 批量处理满足执行条件的定时任务
t.execute(list)
}
在 execute 方法中,会对 list 中的定时任务进行遍历:
- 对于 cycle > 0 的定时任务,说明当前还未达到执行条件,需要将其 cycle 值减 1,留待后续轮次再处理
- 对于 cycle = 0 的定时任务,开启一个 goroutine ,执行其中的闭包函数 task,并将其从 list 和 map 中移除
// 执行定时任务,每次处理一个 list
func (t *TimeWheel) execute(l *list.List) {
// 遍历 list
for e := l.Front(); e != nil; {
// 获取到每个节点对应的定时任务信息
taskElement, _ := e.Value.(*taskElement)
// 倘若任务还存在延迟轮次,则只对 cycle 计数器进行扣减,本轮不作任务的执行
if taskElement.cycle > 0 {
taskElement.cycle--
e = e.Next()
continue
}
// 当前节点对应定时任务已达成执行条件,开启一个 goroutine 负责执行任务
go func() {
defer func() {
if err := recover(); err != nil {
// ...
}
}()
taskElement.task()
}()
// 任务已执行,需要把对应的任务节点从 list 中删除
next := e.Next()
l.Remove(e)
// 把任务 key 从映射 map 中删除
delete(t.keyToETask, taskElement.key)
e = next
}
}
// 每次 tick 后需要推进 curSlot 指针的位置,slots 在逻辑意义上是环状数组,所以在到达尾部时需要从新回到头部
func (t *TimeWheel) circularIncr() {
t.curSlot = (t.curSlot + 1) % len(t.slots)
}

总结
看了小徐先生的推文跟B站视频收获很多,也期待后续跟着大佬继续学习。
参考
https://zhuanlan.zhihu.com/p/658079556
https://blog.csdn.net/YouMing_Li/article/details/134089794