- 每日算法&面试题,大厂特训二十八天——第二十天(树)
肥学
⚡算法题⚡面试题每日精进java算法数据结构
目录标题导读算法特训二十八天面试题点击直接资料领取导读肥友们为了更好的去帮助新同学适应算法和面试题,最近我们开始进行专项突击一步一步来。上一期我们完成了动态规划二十一天现在我们进行下一项对各类算法进行二十八天的一个小总结。还在等什么快来一起肥学进行二十八天挑战吧!!特别介绍小白练手专栏,适合刚入手的新人欢迎订阅编程小白进阶python有趣练手项目里面包括了像《机器人尬聊》《恶搞程序》这样的有趣文章
- Python算法L5:贪心算法
小熊同学哦
Python算法算法python贪心算法
Python贪心算法简介目录Python贪心算法简介贪心算法的基本步骤贪心算法的适用场景经典贪心算法问题1.**零钱兑换问题**2.**区间调度问题**3.**背包问题**贪心算法的优缺点优点:缺点:结语贪心算法(GreedyAlgorithm)是一种在每一步选择中都采取当前最优或最优解的算法。它的核心思想是,在保证每一步局部最优的情况下,希望通过贪心选择达到全局最优解。虽然贪心算法并不总能得到全
- 代码随想录Day 41|动态规划之买卖股票问题,leetcode题目121. 买卖股票的最佳时机、122. 买卖股票的最佳时机Ⅱ、123. 买卖股票的最佳时机Ⅲ
LluckyYH
动态规划leetcode算法数据结构
提示:DDU,供自己复习使用。欢迎大家前来讨论~文章目录买卖股票的最佳时机相关题目题目一:121.买卖股票的最佳时机解题思路:题目二:122.买卖股票的最佳时机II解题思路:题目三:123.买卖股票的最佳时机III解题思路总结买卖股票的最佳时机相关题目题目一:121.买卖股票的最佳时机[[121.买卖股票的最佳时机](https://leetcode.cn/problems/combination
- 深度 Qlearning:在直播推荐系统中的应用
AGI通用人工智能之禅
程序员提升自我硅基计算碳基计算认知计算生物计算深度学习神经网络大数据AIGCAGILLMJavaPython架构设计Agent程序员实现财富自由
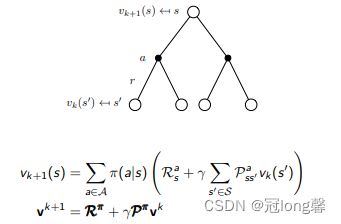
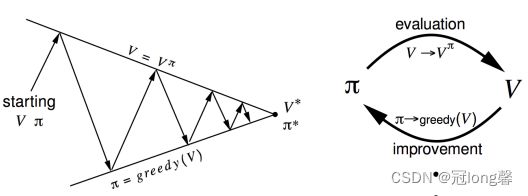
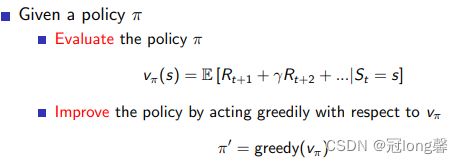
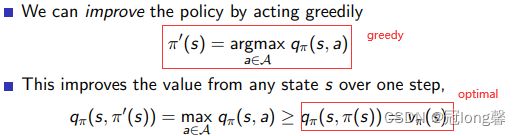
深度Q-learning:在直播推荐系统中的应用关键词:深度Q-learning,强化学习,直播推荐系统,个性化推荐1.背景介绍1.1问题的由来随着互联网技术的飞速发展,直播平台如雨后春笋般涌现。面对海量的直播内容,用户很难快速找到自己感兴趣的内容。因此,个性化推荐系统在直播平台中扮演着越来越重要的角色。1.2研究现状目前,主流的个性化推荐算法包括协同过滤、基于内容的推荐等。这些方法在一定程度上缓
- 后端开发刷题 | 把数字翻译成字符串(动态规划)
jingling555
笔试题目动态规划java算法数据结构后端
描述有一种将字母编码成数字的方式:'a'->1,'b->2',...,'z->26'。现在给一串数字,返回有多少种可能的译码结果数据范围:字符串长度满足0=10&&num<=26){if(i==1){dp[i]+=1;}else{dp[i]+=dp[i-2];}}}returndp[nums.length()-1];}}
- 滑动窗口+动态规划
wniuniu_
算法动态规划算法
前言:分析这个题目的时候,就知道要这两个线段要分开,但是要保证得到最优解,那么我们在选取第二根线段的时候,要保证我们第一根线段是左边最优解并且我们选的两根线段的右端点一定是我们的数组的点(贪心思想)classSolution{public:intmaximizeWin(vector&prizePositions,intk){intn=prizePositions.size();vectormx(n
- OpenAI o1 的价值意义及“强化学习的Scaling Law” & Kimi创始人杨植麟最新分享:关于OpenAI o1新范式的深度思考
光剑书架上的书
ChatGPT大数据AI人工智能计算人工智能算法机器学习
OpenAIo1的价值意义及“强化学习的ScalingLaw”蹭下热度谈谈OpenAIo1的价值意义及RL的Scalinglaw。一、OpenAIo1是大模型的巨大进步我觉得OpenAIo1是自GPT4发布以来,基座大模型最大的进展,逻辑推理能力提升的效果和方法比预想的要好,GPT4o和o1是发展大模型不同的方向,但是o1这个方向更根本,重要性也比GPT4o这种方向要重要得多,原因下面会分析。为什
- 探索未来,大规模分布式深度强化学习——深入解析IMPALA架构
汤萌妮Margaret
探索未来,大规模分布式深度强化学习——深入解析IMPALA架构scalable_agent项目地址:https://gitcode.com/gh_mirrors/sc/scalable_agent在当今的人工智能研究前沿,深度强化学习(DRL)因其在复杂任务中的卓越表现而备受瞩目。本文要介绍的是一个开源于GitHub的重量级项目:“ScalableDistributedDeep-RLwithImp
- 【NO.72】LeetCode HOT 100—279. 完全平方数
悬浮海
#LeetCodeHOT100leetcode算法279.完全平方数
文章目录279.完全平方数解题方法:动态规划279.完全平方数给你一个整数n,返回和为n的完全平方数的最少数量。完全平方数是一个整数,其值等于另一个整数的平方;换句话说,其值等于一个整数自乘的积。例如,1、4、9和16都是完全平方数,而3和11不是。示例1:输入:n=12输出:3解释:12=4+4+4示例2:输入:n=13输出:2解释:13=4+9提示:1<=n<=104解题方法:动态规划动态规划
- 洛谷P2066 机器分配
summ1ts
算法动态规划
此题可用动态规划解决,首先进行阶段划分,可将解决问题的过程看作逐一为每家公司分配机器,因此按照已分配公司数量划分阶段,设变量i代表前i家公司。设计状态,设f[i][j]代表前i家公司分配j台设备能产生的最大盈利。确定决策为第i家公司分配多少设备,决策变量k范围0usingnamespacestd;inta[20][20],f[20][20],g[20][20];intn,m;voidprint(i
- 代码随想录算法训练营第46天 | LeetCode647.回文子串、 LeetCode516.最长回文子序列
霸L
算法数据结构动态规划
目录LeetCode647.回文子串1.动态规划2.双指针法LeetCode516.最长回文子序列LeetCode647.回文子串给你一个字符串s,请你统计并返回这个字符串中回文子串的数目。回文字符串是正着读和倒过来读一样的字符串。子字符串是字符串中的由连续字符组成的一个序列。思路:在回溯系列也做过求给定字符串的所有回文子串,那里求的是所有的划分结果,这里统计的是回文子串的数目,但是因为回溯本质上
- 12312312
二进制掌控者
c++
c语言中的小小白-CSDN博客c语言中的小小白关注算法,c++,c语言,贪心算法,链表,mysql,动态规划,后端,线性回归,数据结构,排序算法领域.https://blog.csdn.net/bhbcdxb123?spm=1001.2014.3001.5343给大家分享一句我很喜欢我话:知不足而奋进,望远山而前行!!!铁铁们,成功的路上必然是孤独且艰难的,但是我们不可以放弃,远山就在前方,但我们
- 你知道什么是回调函数吗?
二进制掌控者
#C语言专栏c语言开发语言
c语言中的小小白-CSDN博客c语言中的小小白关注算法,c++,c语言,贪心算法,链表,mysql,动态规划,后端,线性回归,数据结构,排序算法领域.https://blog.csdn.net/bhbcdxb123?spm=1001.2014.3001.5343给大家分享一句我很喜欢我话:知不足而奋进,望远山而前行!!!铁铁们,成功的路上必然是孤独且艰难的,但是我们不可以放弃,远山就在前方,但我们
- Leetcode面试经典150题-221.最大正方形
鱼跃鹰飞
数据结构与算法字节跳动高频面试题leetcode面试算法
解法都在代码里,不懂就留言或者私信classSolution{/**本题一看就是典型的动态规划,要找以每个点为右下角的正方形的面积,然后取最大的这个题要注意找规律,我找到的规律如下:1.以第一行为右下角的,因为正方形是边长相同的,所以第一行为右下角最大正方形只能是自己,自己是1就是1,不是1就是02.以第一列为右下角的也是一样。3.以普通位置为右下角的最大正方形,首先看自己是不是1,如果自己不是1
- 贪心算法day31|56. 合并区间、738. 单调递增的数字(整数与字符串的转换)、贪心刷题总结
桃酥403
贪心算法算法leetcodec++字符串
贪心算法day31|56.合并区间、738.单调递增的数字、贪心刷题总结56.合并区间738.单调递增的数字贪心刷题总结56.合并区间以数组intervals表示若干个区间的集合,其中单个区间为intervals[i]=[starti,endi]。请你合并所有重叠的区间,并返回一个不重叠的区间数组,该数组需恰好覆盖输入中的所有区间。示例1:输入:intervals=[[1,3],[2,6],[8,
- 如何有效的学习AI大模型?
Python程序员罗宾
学习人工智能语言模型自然语言处理架构
学习AI大模型是一个系统性的过程,涉及到多个学科的知识。以下是一些建议,帮助你更有效地学习AI大模型:基础知识储备:数学基础:学习线性代数、概率论、统计学和微积分等,这些是理解机器学习算法的数学基础。编程技能:掌握至少一种编程语言,如Python,因为大多数AI模型都是用Python实现的。理论学习:机器学习基础:了解监督学习、非监督学习、强化学习等基本概念。深度学习:学习神经网络的基本结构,如卷
- 详解贪心算法
凭君语未可
算法软考算法贪心算法
贪心算法什么是贪心算法?贪心算法的特点贪心算法的应用场景贪心算法的基本思路贪心算法的经典应用1.活动选择问题2.最小硬币找零问题3.霍夫曼编码问题贪心算法的正确性贪心算法的优缺点总结什么是贪心算法?贪心算法(GreedyAlgorithm)是一种基于每一步都选择当前最优解的算法设计思想。它在每个阶段总是做出在当前看来最优的选择(局部最优解),而不回溯或考虑整个问题的全局最优性。它期望通过这样逐步构
- 反思的魔力:用语言的力量强化AI智能体
步子哥
人工智能机器学习
在浩瀚的代码海洋中,AI智能体就像初出茅庐的航海家,渴望探索未知的宝藏。然而,面对复杂的编程任务,他们常常迷失方向。今天,就让我们跟随“反思”的灯塔,见证AI智能体如何通过语言的力量,点亮智慧的明灯,成为代码世界的征服者!智能体的困境近年来,大型语言模型(LLM)在与外部环境(如游戏、编译器、API)交互的领域中大放异彩,化身为目标驱动的智能体。然而,传统的强化学习方法如同一位严苛的训练师,需要大
- 【NO.5】LeetCode HOT 100—5. 最长回文子串
悬浮海
#LeetCodeHOT100leetcode算法5.最长回文子串
文章目录5.最长回文子串解题方法一:动态规划方法二:中心扩展5.最长回文子串5.最长回文子串给你一个字符串s,找到s中最长的回文子串。如果字符串的反序与原始字符串相同,则该字符串称为回文字符串。示例1:输入:s=“babad”输出:“bab”解释:“aba”同样是符合题意的答案。示例2:输入:s=“cbbd”输出:“bb”提示:1maxLength){maxLength=j-i+1;index=i
- 大二上学期详细学习计划
学会沉淀。
学习
本学习完成目标:项目:书籍:《mysql必知必会》《java核心技术卷》(暂时)加强JavaSE的学习,掌握Java核心Mysql+sql(把牛客上的那50道sql语句题写完)git+maven完成springboot项目(跟着黑马敲)对于每天的Java学习进行记录算法:刷题(多去刷cf上的题,每周15道)针对最近比赛薄弱的地方加强练习(图论,字符串,动态规划,搜索)cf先上1400,牛客和atc
- 运筹学——图论与最短距离(Python实现)(2),2024年最新Python高级面试framework
m0_60575487
2024年程序员学习图论python面试
适用于wij≥0,给出了从vs到任意一个点vj的最短路。Dijkstra算法是在1959年提出来的。目前公认,在所有的权wij≥0时,这个算法是寻求最短路问题最好的算法。并且,这个算法实际上也给出了寻求从一个始定点vs到任意一个点vj的最短路。2案例1——贪心算法实现==============2.1旅行商问题(TSP)**旅行商问题(TravelingSalesmanProblem,TSP)**
- 数据结构与算法 - 贪心算法
临界点oc
数据结构与算法贪心算法算法
一、贪心例子贪心算法或贪婪算法的核心思想是:1.将寻找最优解的问题分为若干个步骤2.每一步骤都采用贪心原则,选取当前最优解3.因为没有考虑所有可能,局部最优的堆叠不一定让最终解最优贪心算法是一种在每一步选择中都采取在当前状态下最好或最优(即最有利)的选择,从而希望导致结果是最好或最优的算法。这种算法通常用于求解优化问题,如最小生成树、背包问题等。贪心算法的应用:1.背包问题:给定一组物品和一个背包
- 代码随想录算法训练营第三十九天| 62. 不同路径,63. 不同路径 II
零offer在手
算法动态规划图论
62.不同路径搞清楚dp[i][j]的定义推导出公式遍历顺序,从左到右,从上到下dp的初始化动态规划中如何初始化很重要!|LeetCode:62.不同路径_哔哩哔哩_bilibili《代码随想录》算法公开课开讲啦!快来打卡!本期视频的文字讲解版在「代码随想录」刷题网站:programmercarl.comGithub:https://github.com/youngyangyang04/leetc
- 数学建模笔记——动态规划
liangbm3
数学建模笔记数学建模笔记动态规划python背包问题算法优化问题
数学建模笔记——动态规划动态规划1.模型原理2.典型例题2.1例1凑硬币2.2例2背包问题3.python代码实现3.1例13.2例2动态规划1.模型原理动态规划是运筹学的一个分支,通常用来解决多阶段决策过程最优化问题。动态规划的基本想法就是将原问题转换为一系列相互联系的子问题,然后通过逐层地推来求得最后的解。目前,动态规划常常出现在各类计算机算法竞赛或者程序员笔试面试中,在数学建模中出现的相对较
- 机器学习实战笔记5——线性判别分析
绍少阿
机器学习笔记可视化机器学习python人工智能
任务安排1、机器学习导论8、核方法2、KNN及其实现9、稀疏表示3、K-means聚类10、高斯混合模型4、主成分分析11、嵌入学习5、线性判别分析12、强化学习6、贝叶斯方法13、PageRank7、逻辑回归14、深度学习线性判别分析(LDA)Ⅰ核心思想对于同样一件事,站在不同的角度,我们往往会有不同的看法,而降维思想,亦是如此。同上节课一样,我们还是学习降维的算法,只是提供了一种新的角度,由上
- 代码随想录训练营 Day38打卡 动态规划 part06 322. 零钱兑换 279. 完全平方数 139. 单词拆分
那一抹阳光多灿烂
力扣动态规划动态规划算法python力扣
代码随想录训练营Day38打卡动态规划part06一、力扣322.零钱兑换给你一个整数数组coins,表示不同面额的硬币;以及一个整数amount,表示总金额。计算并返回可以凑成总金额所需的最少的硬币个数。如果没有任何一种硬币组合能组成总金额,返回-1。你可以认为每种硬币的数量是无限的。示例:输入:coins=[1,2,5],amount=11输出:3解释:11=5+5+1题目中说每种硬币的数量是
- 代码随想录训练营 Day45打卡 动态规划 part12 115. 不同的子序列 583. 两个字符串的删除操作 72. 编辑距离
那一抹阳光多灿烂
力扣动态规划动态规划算法leetcodepython
代码随想录训练营Day45打卡动态规划part12一、力扣115.不同的子序列给你两个字符串s和t,统计并返回在s的子序列中t出现的个数,结果需要对109+7取模。示例:输入:s=“rabbbit”,t=“rabbit”输出:3解释:如下所示,有3种可以从s中得到“rabbit”的方案。rabbbitrabbbitrabbbit确定dp数组的定义dp[i][j]表示s的前i个字符中子序列等于t的前
- 算法设计与分析期末复习题汇总
wisdom_zhe
Java题库算法
文章目录1、选择题1.1选择题11.2选择题22、判断题2.1判断题12.2判断题23、填空题3.1算法填空3.2填空题24、简答题1、选择题1.1选择题11、下列不是动态规划算法基本步骤的是(A)。A、找出最优解的解空间B、构造最优解C、算出最优解D、定义最优解2、最大效益优先是(A)的一搜索方式。A、分支界限法B、动态规划法C、贪心法D、回溯法3、最长公共子序列算法利用的算法是(B)。A、分支
- 五一的成果
王跃坤txdy
emm。。五一过了有意义的四天。原来简单的图论我也是可以搞出来的原来DFS放进图论真的会使难度变大原来BFS在没有出口的时候会以超指数的爆炸增长原来二叉树并不是很难原来哈希的速度远超数组原来动态规划滚动起来速度真的快原来栈是那么的有用,可惜来不及学了(遇到一个求化学方程式的算法题,我自己写了133行的字符串处理,原来用栈可以缩减3倍的代码)原来很多复杂的问题都可以拆解成很简单的问题比如我好像发现数
- [01] 动态规划解题套路框架
_魔佃_
本文解决几个问题:动态规划是什么?解决动态规划问题有什么技巧?如何学习动态规划?刷题刷多了就会发现,算法技巧就那几个套路。所以本文放在第一章,来扒一扒动态规划的裤子,形成一套解决这类问题的思维框架,希望能够成为解决动态规划问题的一部指导方针。本文就来讲解该算法的基本套路框架,下面上干货。labuladong的算法小抄首先,动态规划问题的一般形式就是求最值。动态规划其实是运筹学的一种最优化方法,只不
- Java常用排序算法/程序员必须掌握的8大排序算法
cugfy
java
分类:
1)插入排序(直接插入排序、希尔排序)
2)交换排序(冒泡排序、快速排序)
3)选择排序(直接选择排序、堆排序)
4)归并排序
5)分配排序(基数排序)
所需辅助空间最多:归并排序
所需辅助空间最少:堆排序
平均速度最快:快速排序
不稳定:快速排序,希尔排序,堆排序。
先来看看8种排序之间的关系:
1.直接插入排序
(1
- 【Spark102】Spark存储模块BlockManager剖析
bit1129
manager
Spark围绕着BlockManager构建了存储模块,包括RDD,Shuffle,Broadcast的存储都使用了BlockManager。而BlockManager在实现上是一个针对每个应用的Master/Executor结构,即Driver上BlockManager充当了Master角色,而各个Slave上(具体到应用范围,就是Executor)的BlockManager充当了Slave角色
- linux 查看端口被占用情况详解
daizj
linux端口占用netstatlsof
经常在启动一个程序会碰到端口被占用,这里讲一下怎么查看端口是否被占用,及哪个程序占用,怎么Kill掉已占用端口的程序
1、lsof -i:port
port为端口号
[root@slave /data/spark-1.4.0-bin-cdh4]# lsof -i:8080
COMMAND PID USER FD TY
- Hosts文件使用
周凡杨
hostslocahost
一切都要从localhost说起,经常在tomcat容器起动后,访问页面时输入http://localhost:8088/index.jsp,大家都知道localhost代表本机地址,如果本机IP是10.10.134.21,那就相当于http://10.10.134.21:8088/index.jsp,有时候也会看到http: 127.0.0.1:
- java excel工具
g21121
Java excel
直接上代码,一看就懂,利用的是jxl:
import java.io.File;
import java.io.IOException;
import jxl.Cell;
import jxl.Sheet;
import jxl.Workbook;
import jxl.read.biff.BiffException;
import jxl.write.Label;
import
- web报表工具finereport常用函数的用法总结(数组函数)
老A不折腾
finereportweb报表函数总结
ADD2ARRAY
ADDARRAY(array,insertArray, start):在数组第start个位置插入insertArray中的所有元素,再返回该数组。
示例:
ADDARRAY([3,4, 1, 5, 7], [23, 43, 22], 3)返回[3, 4, 23, 43, 22, 1, 5, 7].
ADDARRAY([3,4, 1, 5, 7], "测试&q
- 游戏服务器网络带宽负载计算
墙头上一根草
服务器
家庭所安装的4M,8M宽带。其中M是指,Mbits/S
其中要提前说明的是:
8bits = 1Byte
即8位等于1字节。我们硬盘大小50G。意思是50*1024M字节,约为 50000多字节。但是网宽是以“位”为单位的,所以,8Mbits就是1M字节。是容积体积的单位。
8Mbits/s后面的S是秒。8Mbits/s意思是 每秒8M位,即每秒1M字节。
我是在计算我们网络流量时想到的
- 我的spring学习笔记2-IoC(反向控制 依赖注入)
aijuans
Spring 3 系列
IoC(反向控制 依赖注入)这是Spring提出来了,这也是Spring一大特色。这里我不用多说,我们看Spring教程就可以了解。当然我们不用Spring也可以用IoC,下面我将介绍不用Spring的IoC。
IoC不是框架,她是java的技术,如今大多数轻量级的容器都会用到IoC技术。这里我就用一个例子来说明:
如:程序中有 Mysql.calss 、Oracle.class 、SqlSe
- 高性能mysql 之 选择存储引擎(一)
annan211
mysqlInnoDBMySQL引擎存储引擎
1 没有特殊情况,应尽可能使用InnoDB存储引擎。 原因:InnoDB 和 MYIsAM 是mysql 最常用、使用最普遍的存储引擎。其中InnoDB是最重要、最广泛的存储引擎。她 被设计用来处理大量的短期事务。短期事务大部分情况下是正常提交的,很少有回滚的情况。InnoDB的性能和自动崩溃 恢复特性使得她在非事务型存储的需求中也非常流行,除非有非常
- UDP网络编程
百合不是茶
UDP编程局域网组播
UDP是基于无连接的,不可靠的传输 与TCP/IP相反
UDP实现私聊,发送方式客户端,接受方式服务器
package netUDP_sc;
import java.net.DatagramPacket;
import java.net.DatagramSocket;
import java.net.Ine
- JQuery对象的val()方法执行结果分析
bijian1013
JavaScriptjsjquery
JavaScript中,如果id对应的标签不存在(同理JAVA中,如果对象不存在),则调用它的方法会报错或抛异常。在实际开发中,发现JQuery在id对应的标签不存在时,调其val()方法不会报错,结果是undefined。
- http请求测试实例(采用json-lib解析)
bijian1013
jsonhttp
由于fastjson只支持JDK1.5版本,因些对于JDK1.4的项目,可以采用json-lib来解析JSON数据。如下是http请求的另外一种写法,仅供参考。
package com;
import java.util.HashMap;
import java.util.Map;
import
- 【RPC框架Hessian四】Hessian与Spring集成
bit1129
hessian
在【RPC框架Hessian二】Hessian 对象序列化和反序列化一文中介绍了基于Hessian的RPC服务的实现步骤,在那里使用Hessian提供的API完成基于Hessian的RPC服务开发和客户端调用,本文使用Spring对Hessian的集成来实现Hessian的RPC调用。
定义模型、接口和服务器端代码
|---Model
&nb
- 【Mahout三】基于Mahout CBayes算法的20newsgroup流程分析
bit1129
Mahout
1.Mahout环境搭建
1.下载Mahout
http://mirror.bit.edu.cn/apache/mahout/0.10.0/mahout-distribution-0.10.0.tar.gz
2.解压Mahout
3. 配置环境变量
vim /etc/profile
export HADOOP_HOME=/home
- nginx负载tomcat遇非80时的转发问题
ronin47
nginx负载后端容器是tomcat(其它容器如WAS,JBOSS暂没发现这个问题)非80端口,遇到跳转异常问题。解决的思路是:$host:port
详细如下:
该问题是最先发现的,由于之前对nginx不是特别的熟悉所以该问题是个入门级别的:
? 1 2 3 4 5
- java-17-在一个字符串中找到第一个只出现一次的字符
bylijinnan
java
public class FirstShowOnlyOnceElement {
/**Q17.在一个字符串中找到第一个只出现一次的字符。如输入abaccdeff,则输出b
* 1.int[] count:count[i]表示i对应字符出现的次数
* 2.将26个英文字母映射:a-z <--> 0-25
* 3.假设全部字母都是小写
*/
pu
- mongoDB 复制集
开窍的石头
mongodb
mongo的复制集就像mysql的主从数据库,当你往其中的主复制集(primary)写数据的时候,副复制集(secondary)会自动同步主复制集(Primary)的数据,当主复制集挂掉以后其中的一个副复制集会自动成为主复制集。提供服务器的可用性。和防止当机问题
mo
- [宇宙与天文]宇宙时代的经济学
comsci
经济
宇宙尺度的交通工具一般都体型巨大,造价高昂。。。。。
在宇宙中进行航行,近程采用反作用力类型的发动机,需要消耗少量矿石燃料,中远程航行要采用量子或者聚变反应堆发动机,进行超空间跳跃,要消耗大量高纯度水晶体能源
以目前地球上国家的经济发展水平来讲,
- Git忽略文件
Cwind
git
有很多文件不必使用git管理。例如Eclipse或其他IDE生成的项目文件,编译生成的各种目标或临时文件等。使用git status时,会在Untracked files里面看到这些文件列表,在一次需要添加的文件比较多时(使用git add . / git add -u),会把这些所有的未跟踪文件添加进索引。
==== ==== ==== 一些牢骚
- MySQL连接数据库的必须配置
dashuaifu
mysql连接数据库配置
MySQL连接数据库的必须配置
1.driverClass:com.mysql.jdbc.Driver
2.jdbcUrl:jdbc:mysql://localhost:3306/dbname
3.user:username
4.password:password
其中1是驱动名;2是url,这里的‘dbna
- 一生要养成的60个习惯
dcj3sjt126com
习惯
一生要养成的60个习惯
第1篇 让你更受大家欢迎的习惯
1 守时,不准时赴约,让别人等,会失去很多机会。
如何做到:
①该起床时就起床,
②养成任何事情都提前15分钟的习惯。
③带本可以随时阅读的书,如果早了就拿出来读读。
④有条理,生活没条理最容易耽误时间。
⑤提前计划:将重要和不重要的事情岔开。
⑥今天就准备好明天要穿的衣服。
⑦按时睡觉,这会让按时起床更容易。
2 注重
- [介绍]Yii 是什么
dcj3sjt126com
PHPyii2
Yii 是一个高性能,基于组件的 PHP 框架,用于快速开发现代 Web 应用程序。名字 Yii (读作 易)在中文里有“极致简单与不断演变”两重含义,也可看作 Yes It Is! 的缩写。
Yii 最适合做什么?
Yii 是一个通用的 Web 编程框架,即可以用于开发各种用 PHP 构建的 Web 应用。因为基于组件的框架结构和设计精巧的缓存支持,它特别适合开发大型应
- Linux SSH常用总结
eksliang
linux sshSSHD
转载请出自出处:http://eksliang.iteye.com/blog/2186931 一、连接到远程主机
格式:
ssh name@remoteserver
例如:
ssh
[email protected]
二、连接到远程主机指定的端口
格式:
ssh name@remoteserver -p 22
例如:
ssh i
- 快速上传头像到服务端工具类FaceUtil
gundumw100
android
快速迭代用
import java.io.DataOutputStream;
import java.io.File;
import java.io.FileInputStream;
import java.io.FileNotFoundException;
import java.io.FileOutputStream;
import java.io.IOExceptio
- jQuery入门之怎么使用
ini
JavaScripthtmljqueryWebcss
jQuery的强大我何问起(个人主页:hovertree.com)就不用多说了,那么怎么使用jQuery呢?
首先,下载jquery。下载地址:http://hovertree.com/hvtart/bjae/b8627323101a4994.htm,一个是压缩版本,一个是未压缩版本,如果在开发测试阶段,可以使用未压缩版本,实际应用一般使用压缩版本(min)。然后就在页面上引用。
- 带filter的hbase查询优化
kane_xie
查询优化hbaseRandomRowFilter
问题描述
hbase scan数据缓慢,server端出现LeaseException。hbase写入缓慢。
问题原因
直接原因是: hbase client端每次和regionserver交互的时候,都会在服务器端生成一个Lease,Lease的有效期由参数hbase.regionserver.lease.period确定。如果hbase scan需
- java设计模式-单例模式
men4661273
java单例枚举反射IOC
单例模式1,饿汉模式
//饿汉式单例类.在类初始化时,已经自行实例化
public class Singleton1 {
//私有的默认构造函数
private Singleton1() {}
//已经自行实例化
private static final Singleton1 singl
- mongodb 查询某一天所有信息的3种方法,根据日期查询
qiaolevip
每天进步一点点学习永无止境mongodb纵观千象
// mongodb的查询真让人难以琢磨,就查询单天信息,都需要花费一番功夫才行。
// 第一种方式:
coll.aggregate([
{$project:{sendDate: {$substr: ['$sendTime', 0, 10]}, sendTime: 1, content:1}},
{$match:{sendDate: '2015-
- 二维数组转换成JSON
tangqi609567707
java二维数组json
原文出处:http://blog.csdn.net/springsen/article/details/7833596
public class Demo {
public static void main(String[] args) { String[][] blogL
- erlang supervisor
wudixiaotie
erlang
定义supervisor时,如果是监控celuesimple_one_for_one则删除children的时候就用supervisor:terminate_child (SupModuleName, ChildPid),如果shutdown策略选择的是brutal_kill,那么supervisor会调用exit(ChildPid, kill),这样的话如果Child的behavior是gen_