从零手写VIO(7)
从零手写VIO(7)
文章目录
- 从零手写VIO(7)
- 前言
- 一、VINS-Course代码解析
- 二、作业(7)
-
- 1.simulation-test.cpp修改
- 2.Sysytem.cpp修改
- 3.config文件夹下euroc_config.yaml参数修改
- 4.param.h修改
-
- 4.1无噪声
- 4.2小噪声
- 4.3大噪声
- 总结
前言
一、VINS-Course代码解析
这部分对自己比较难,很多看不太懂,主要参考其他大佬的解析,主要参考如下
[从零写VIO|第七节]——VINS-Mono代码精简版代码详解——run_euroc前端的数据处理(内容|代码),写得特别详细,不管是前端,后端以及初始化部分都有详细的解析(后端及初始化部分可以根据这篇文章的链接顺序看下去)!!
二、作业(7)
将第二讲的仿真数据集(视觉特征,imu 数据)接入我们的 VINS代码,并运行出轨迹结果
• 仿真数据集无噪声
• 仿真数据集有噪声(不同噪声设定时,需要配置 vins 中 imu noise大小。)
这部分主要参考深蓝学院《从零开始手写VIO》作业7以及从零手写vio-作业7。
1.simulation-test.cpp修改
在VINS-Course下的test文件夹新建simulation-test.cpp代码,将vio_data_simulation文件夹放在在VINS-Course下的src文件夹下,并编译生成文件,修改sData_path :string sData_path = “/home/yy/VINS-Course/src/vio_data_simulation/bin/”;并把vio_data_simulation生成的bin文件夹下的文件imu_pose_noise.txt,cam_pose.txt,imu_pose.txt复制到VINS-Course中的config文件夹下。
//
// Created by yy on 22-7-22.
//
//
// Created by yy on 22-7-22.
//
#include 注意上述代码路径修改,以及void PubImuData(),void PubImageData()中函数修改。
且CMakeLists.txt文件添加如下:
add_executable(simulation_test test/simulation-test.cpp)
target_link_libraries(simulation_test
MyVio
-lpthread)
2.Sysytem.cpp修改
在System.h中添加函数声明:
void PubSimImageData(double dStampSec, const vector<cv::Point2f> &FeaturePoints);
在System.cpp中添加函数,代码如下:
void System::PubSimImageData(double dStampSec, const vector<cv::Point2f> &FeaturePoints)
{
if (!init_feature)
{
cout << "1 PubImageData skip the first detected feature, which doesn't contain optical flow speed" << endl;
init_feature = 1;
return;
}
if (first_image_flag)
{
cout << "2 PubImageData first_image_flag" << endl;
first_image_flag = false;
first_image_time = dStampSec;
last_image_time = dStampSec;
return;
}
// detect unstable camera stream 发现时间戳不连续甚至倒退,提示重新输入
if (dStampSec - last_image_time > 1.0 || dStampSec < last_image_time)
{
cerr << "3 PubImageData image discontinue! reset the feature tracker!" << endl;
first_image_flag = true;
last_image_time = 0;
pub_count = 1;
return;
}
last_image_time = dStampSec;
// frequency control 控制频率设定小于某一阈值
// if (round(1.0 * pub_count / (dStampSec - first_image_time)) <= FREQ)
// {
// PUB_THIS_FRAME = true;
// // reset the frequency control TODO question:若当前连续图像序列的频率与 FREQ=10 误差在一定范围内重置?
// if (abs(1.0 * pub_count / (dStampSec - first_image_time) - FREQ) < 0.01 * FREQ)
// {
// first_image_time = dStampSec;
// pub_count = 0;
// }
// }
// else
// {
// PUB_THIS_FRAME = false;
// }
PUB_THIS_FRAME = true;
TicToc t_r;
// cout << "3 PubImageData t : " << dStampSec << endl;
// TODO Bookmark:获取图像特征点
// trackerData[0].readImage(img, dStampSec);
// trackerData[0].readPoints(FeaturePoints, dStampSec);
// for (unsigned int i = 0;; i++)
// {
// bool completed = false;
// completed |= trackerData[0].updateID(i);
//
// if (!completed)
// break;
// }
if (PUB_THIS_FRAME)
{
pub_count++;
shared_ptr<IMG_MSG> feature_points(new IMG_MSG());
feature_points->header = dStampSec;
vector<set<int>> hash_ids(NUM_OF_CAM);
for (int i = 0; i < NUM_OF_CAM; i++)
{
// auto &un_pts = trackerData[i].cur_un_pts;// 去畸变的归一化图像坐标
// auto &cur_pts = trackerData[i].cur_pts;// 当前追踪到的特征点
// auto &ids = trackerData[i].ids;
// auto &pts_velocity = trackerData[i].pts_velocity;
for (unsigned int j = 0; j < FeaturePoints.size(); j++)
{
// if (trackerData[i].track_cnt[j] > 1)
// {
// int p_id = ids[j];
int p_id = j;
hash_ids[i].insert(p_id);
double x = FeaturePoints[j].x;
double y = FeaturePoints[j].y;
double z = 1;
feature_points->points.push_back(Vector3d(x, y, z));
feature_points->id_of_point.push_back(p_id * NUM_OF_CAM + i);
// feature_points->u_of_point.push_back(cur_pts[j].x); // 像素坐标
// feature_points->v_of_point.push_back(cur_pts[j].y);
// // TODO Bookmark:速度项用于对齐imu时间戳 作业不考虑可以设为0
// feature_points->velocity_x_of_point.push_back(pts_velocity[j].x);
// feature_points->velocity_y_of_point.push_back(pts_velocity[j].y);
cv::Point2f pixel_point;
pixel_point.x = 460 * x + 255;
pixel_point.y = 460 * y + 255;
feature_points->u_of_point.push_back(pixel_point.x); // 像素坐标
feature_points->v_of_point.push_back(pixel_point.y);
feature_points->velocity_x_of_point.push_back(0);
feature_points->velocity_y_of_point.push_back(0);
// }
}
// skip the first image; since no optical speed on frist image
if (!init_pub)
{
cout << "4 PubImage init_pub skip the first image!" << endl;
init_pub = 1;
}
else
{
m_buf.lock();
feature_buf.push(feature_points);
// cout << "5 PubImage t : " << fixed << feature_points->header
// << " feature_buf size: " << feature_buf.size() << endl;
m_buf.unlock();
con.notify_one();
}
}
}
}
3.config文件夹下euroc_config.yaml参数修改
如下所示需要修改的地方:
image_width: 640
image_height: 640
distortion_parameters:
k1: 0
k2: 0
p1: 0
p2: 0
projection_parameters:
fx: 460
fy: 460
cx: 255
cy: 255
extrinsicRotation: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [0, 0, -1,
-1, 0, 0,
0, 1, 0]
extrinsicTranslation: !!opencv-matrix
rows: 3
cols: 1
dt: d
data: [0.05,0.04,0.03]
acc_n: 0.019 # accelerometer measurement noise standard deviation. #0.2 0.04
gyr_n: 0.015 # gyroscope measurement noise standard deviation. #0.05 0.004
acc_w: 0.0001 # accelerometer bias random work noise standard deviation. #0.02
gyr_w: 1.0e-5 # gyroscope bias random work noise standard deviation. #4.0e-5
4.param.h修改
param.h在vio_data_simulation的src文件夹下
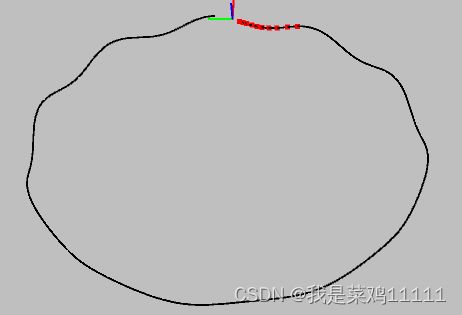
4.1无噪声
void PubImuData()///读IMU数据并调用系统接口去处理imu数据
{
string sImu_data_file = sConfig_path + "imu_pose.txt";
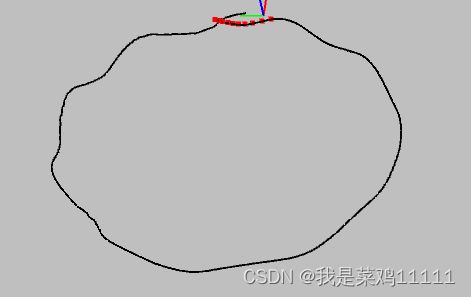
4.2小噪声
void PubImuData()///读IMU数据并调用系统接口去处理imu数据
{
string sImu_data_file = sConfig_path + "imu_pose_noise.txt";
// noise
double gyro_bias_sigma = 1.0e-6;
double acc_bias_sigma = 0.0001;
double gyro_noise_sigma = 0.015; // rad/s * 1/sqrt(hz)
double acc_noise_sigma = 0.019; // m/(s^2) * 1/sqrt(hz)
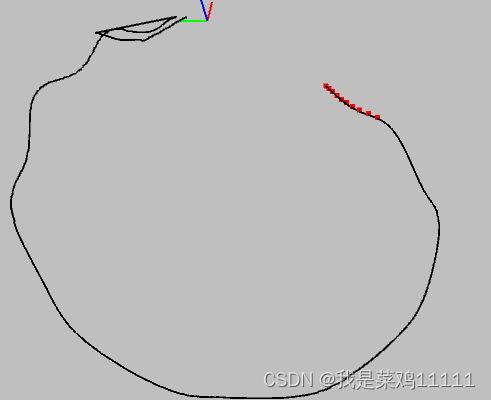
4.3大噪声
// noise
double gyro_bias_sigma = 1.0e-5;
double acc_bias_sigma = 0.0001;
double gyro_noise_sigma = 0.015; // rad/s * 1/sqrt(hz)
double acc_noise_sigma = 0.019; // m/(s^2) * 1/sqrt(hz)
这里比较麻烦点的是imu_pose_noise.txt要重新生成并放在config下
总结
越学越迷糊了属于是。。。。。。
暑假放了半个月的假期,松懈了一段时间,后面要继续努力了!!