《动手学ROS2》9.2为机器人URDF模型注入物理属性并在Gazebo中显示
《动手学ROS2》9.2为机器人URDF模型注入物理属性并在Gazebo中显示
本系列教程作者:小鱼
公众号:鱼香ROS
QQ交流群:139707339
教学视频地址:小鱼的B站
完整文档地址:鱼香ROS官网
版权声明:如非允许禁止转载与商业用途。

9.2为机器人URDF模型注入物理属性并在Gazebo中显示
上节我们知道,机器人仿真就是用软件来模拟硬件的特性,那么我们必须要告诉仿真平台机器人各个关节的物理属性,比如:
- 有多重,
- 有多大的惯性
- 重心在哪
- 碰撞边界在哪
- 关节的上下界限
- 其他的一些必要信息等等
所以这节课小鱼就带你将物理信息写入到urdf中,让机器人在gazebo中显示出来。
1.需要哪些物理信息?
一般来说有碰撞和内参两个就够了,但是因为小鱼之前的偷懒,还要加一个摩擦力配置。
碰撞描述是物体的用于碰撞检测的包围形状。内参用于描述物体的质量,惯性矩阵。link的摩擦力。
1.1 碰撞检测
在机器人仿真中,我们要对物体之前是否接触,是否发生碰撞做检测,常用的检测方法比如包围盒,判断两个物体的包围盒是否相交来快速判断物体是否发生碰撞。
在URDF中,我们可以可以在link标签下添加collison子标签来对物体的形状进行描述。
collision可以包含的子标签如下:
- origin,表示碰撞体的中心位姿
- geometry,用于表示用于碰撞检测的几何形状
material,可选的,描述碰撞几何体的材料(这个设置可以在gazebo仿真时通过view选项看到碰撞包围体的形状)
一个完整的collision标签实例如下:
1.2 旋转惯量
旋转惯量矩阵是用于描述物体的惯性的,在做动力学仿真的时候,这些参数尤为重要。
在URDF中我们可以通过在link下添加inertial子标签,为link添加惯性参数的描述。
intertial标签包含的子标签如下:
- mass,描述link的质量
- inertia,描述link的旋转惯量(该标签有六个属性值ixx\ixy\ixz\iyy\iyz\izz)
一个完整的inertial标签示例如下:
关于intertial的属性设置,不是随意设置的,常见的几何体我们可以通过公式进行计算。计算方法可以看小鱼的这篇文章-URDF仿真惯性参数不知道怎么配?快收藏,常见几何物体URDF分享。
比如我们上一章节的fishbot的轮子和车体,都是实心圆柱,可以采用下面的公式进行计算:
注意:这个矩阵是一个对称矩阵,所以只需要通过其上三角即可描述完整描述这个矩阵,所以在URDF中只需要填写六个数字即可。 实心圆柱体的惯性矩阵:半径为r,高度为h,质量为m 的实心圆柱体 形状:
矩阵:

1.3 摩擦力和刚性系数
在Fishbot的URDF中,前面的支撑轮主要起支撑作用,因为我们将其使用fixed标签固定到了base_link上,所以它无法转动。
哪该怎么办呢?小鱼教你一个取巧的办法,我们可以要把这个轮子的摩擦力设置为0,让它直接在地上滑动即可,
如何设置呢?6行代码放到URDF中:
其中mu1,mu2代表摩擦力,kp,kd代表刚性系数。
2.为FishBot添加物理惯性
利用上面的方法公式,为我们的fishbot哥哥link添加好物理属性,完成后的base_link如下:
完全添加好的机器人URDF模型小鱼已经放到了这里:fishbot_gazebo.urdf
可以将小鱼配置好的模型下载到src/c/urdf文件夹下,等下我们要用gazebo将该模型显示出来。
3.使用gazebo加载URDF
3.1 Gazebo-ROS2插件介绍
在第六章中小鱼曾介绍过,gazebo是独立于ROS/ROS2之外的仿真软件,我们可以独立使用Gazebo。如果我们想要通过ROS2和Gazebo进行交互,需要通过gazebo_ros插件来进行。
接下来小鱼先带你通过命令行的形式来启动gazebo-ros2插件以及使用插件提供的服务来将fishbot的urdf模型在gazebo中显示出来。
3.1.1 安装Gazebo插件
sudo apt install ros-foxy-gazebo-ros
3.1.2 启动Gazebo并启动插件
安装完成后,我们就可以通过下面的命令行来启动gazebo并加载ros2插件。
gazebo --verbose -s libgazebo_ros_factory.so
看到下面的日志和Gazebo界面代表启动成功
Gazebo multi-robot simulator, version 11.9.0
Copyright (C) 2012 Open Source Robotics Foundation.
Released under the Apache 2 License.
http://gazebosim.org
[Msg] Waiting for master.
Gazebo multi-robot simulator, version 11.9.0
Copyright (C) 2012 Open Source Robotics Foundation.
Released under the Apache 2 License.
http://gazebosim.org
[Msg] Waiting for master.
[Msg] Connected to gazebo master @ http://127.0.0.1:11345
[Msg] Publicized address: 192.168.2.103
[Msg] Loading world file [/usr/share/gazebo-11/worlds/empty.world]
[INFO] [1649151283.208884022] [gazebo_ros_node]: ROS was initialized without arguments.
[Msg] Connected to gazebo master @ http://127.0.0.1:11345
[Msg] Publicized address: 192.168.2.103

3.2 插件节点及其服务介绍
使用3.1中的指令启动Gazebo并加载gazebo_ros插件,我们使用下面的指令来看插件的节点,以及改节点为我们提供的服务有哪些?
节点列表
ros2 node list
正确返回
/gazebo
然后我们看看这个节点对外提供的服务有哪些?
ros2 service list
/delete_entity
/get_model_list
/spawn_entity
/gazebo/describe_parameters
/gazebo/get_parameter_types
/gazebo/get_parameters
/gazebo/list_parameters
/gazebo/set_parameters
/gazebo/set_parameters_atomically
除去和参数相关的几个服务,我们可以看到另外三个特殊服务:
- /spawn_entity,用于加载模型到gazebo中
- /get_model_list,用于获取模型列表
- /delete_entity,用于删除gazbeo中已经加载的模型
我们想要让gazebo显示出我们配置好的fishbot使用/spawn_entity来加载即可。
接着我们可以来请求服务来加载模型,小鱼先带你看一下服务的接口类型。
ros2 service type /spawn_entity
返回
gazebo_msgs/srv/SpawnEntity
指令
ros2 interface show gazebo_msgs/srv/SpawnEntity
返回
string name # Name of the entity to be spawned (optional).
string xml # Entity XML description as a string, either URDF or SDF.
string robot_namespace # Spawn robot and all ROS interfaces under this namespace
geometry_msgs/Pose initial_pose # Initial entity pose.
string reference_frame # initial_pose is defined relative to the frame of this entity.
# If left empty or "world" or "map", then gazebo world frame is
# used.
# If non-existent entity is specified, an error is returned
# and the entity is not spawned.
---
bool success # Return true if spawned successfully.
string status_message # Comments if available.
可以看到服务的请求内容包括:
- string name ,需要加载的实体的名称 (可选的)。
- string xml ,实体的XML描述字符串, URDF或者SDF。
- string robot_namespace ,产生的机器人和所有的ROS接口的命名空间,多机器人仿真的时候很有用。
- geometry_msgs/Pose initial_pose ,机器人的初始化位置
- string reference_frame ,初始姿态是相对于该实体的frame定义的。如果保持"empty"或"world"或“map”,则使用 gazebo的world作为frame。如果指定了不存在的实体,则会返回错误
3.3 调用服务加载fishbot
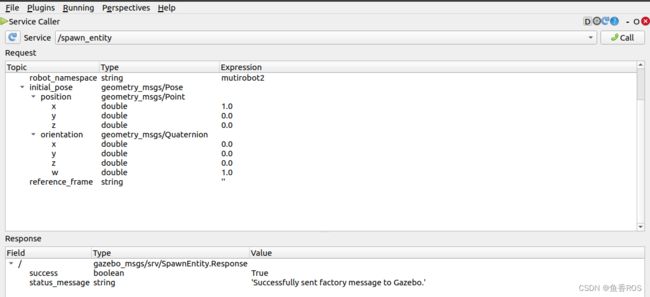
看到这里你是不是迫不及待敲起来命令行来加载我们的机器人到gazebo了,别着急,小鱼再推荐一个可视化服务请求工具,其实在第六章中小鱼介绍过,在rqt工具集里有一个叫服务请求工具。
命令行输入rqt,在插件选项中选择Services->Service Caller,然后再下拉框选择/spawn_entity服务,即可看到下面的界面。

接着我们把我们的FishBot的URDF模型复制粘贴,放到xml中(注意要把原来的’'删掉哦!),然后拿起我们的小电话,和小鱼一起Call。

接着就可以看到工厂返回说成功把机器人制作出来送入gazebo了。
此时再看我们的Gazebo,一个小小的,白白的机器人出现了。
按住Shift加鼠标左键,拖动一下,来好好的欣赏欣赏我们的机器人。

3.4 在不同位置加载多个机器人
欣赏完毕后,小鱼再带你生产一个fishbot(为了后面需要多机器人仿真的小伙伴)。
修改rqt中的参数,增加一个命名空间,然后修改一个位置,让第二个机器人和第一个相距1m的地方生产,然后点击Call。
返回成功,此时拖送Gazebo观察一下,发现多出了一个机器人,距离刚好是在X轴(红色)1米(一个小格子一米)处。

3.5 查询和删除机器人
利用rqt工具,我们再对另外两个服务接口进行请求。

查到了三个模型,一个大地,一个fishbot,一个fishbot_0。
我们接着尝试把fishbot_0删掉,选择删除实体,输入fishbot_0的名字,拿起小电话通知工厂回收我们的0号fishbot。

调用成功,观察gazebo发现机器人没了
4. 将启动gazebo和生产fishbot写成launch文件
打开fishbot工作空间,在src/fishbot_description/launch中添加一个gazebo.launch.py文件,我们开始编写launch文件来在gazebo中加载机器人模型。
启动gazebo,我们可以将命令行写成一个launch节点
ExecuteProcess(
cmd=['gazebo', '--verbose', '-s', 'libgazebo_ros_factory.so'],
output='screen')
上面我们加载机器人是直接将XML格式的URDF复制过去进行加载的,这样很不方便,我们可以使用gazebo_ros为我们提供好的一个叫做spawn_entity.py节点,该节点支持从文件地址直接生产机器人到Gazebo。
其实该节点的原理也很简单,从URDF中读取机器人模型,然后再调用服务,和我们手动操作一个样子,小鱼只道没差别。
该节点需要两个参数,一个机器人的模型名字和urdf的文件地址,这个简单,前面我们曾经使用package_share来拼接过urdf路径。
spawn_entity_cmd = Node(
package='gazebo_ros',
executable='spawn_entity.py',
arguments=['-entity', robot_name_in_model, '-file', urdf_model_path ], output='screen')
最终写好的launch文件如下:
import os
from launch import LaunchDescription
from launch.actions import ExecuteProcess
from launch_ros.actions import Node
from launch_ros.substitutions import FindPackageShare
def generate_launch_description():
robot_name_in_model = 'fishbot'
package_name = 'fishbot_description'
urdf_name = "fishbot_gazebo.urdf"
ld = LaunchDescription()
pkg_share = FindPackageShare(package=package_name).find(package_name)
urdf_model_path = os.path.join(pkg_share, f'urdf/{urdf_name}')
# Start Gazebo server
start_gazebo_cmd = ExecuteProcess(
cmd=['gazebo', '--verbose', '-s', 'libgazebo_ros_factory.so'],
output='screen')
# Launch the robot
spawn_entity_cmd = Node(
package='gazebo_ros',
executable='spawn_entity.py',
arguments=['-entity', robot_name_in_model, '-file', urdf_model_path ], output='screen')
ld.add_action(start_gazebo_cmd)
ld.add_action(spawn_entity_cmd)
return ld
编译运行
colcon build --packages-select fishbot_description
source install/setup.bash
ros2 launch fishbot_description gazebo.launch.py
完美显示

5.总结
这节课我们为Fishbot注入了仿真必须的物理属性,但是机器人还是不会动,下一节课我们就利用Gazebo的其他插件,让我们的机器人动起来。
最后再留一个课后作业:
- 尝试将fishbot的物理属性去掉,再加载机器人看看会发生什么?
- 尝试将fishbot的碰撞改成很小,再看看会发生什么?
- gazebo还支持link的材料修改,在URDF中添加下面的代码,给支撑轮一个不一样的材质吧,你也可以将reference改成其他link,装点一下你的机器人。
Gazebo/Black
欢迎将你的实验结果在我们的fishros社区分享~