传统ORB-SLam中位姿优化中雅克比矩阵讲解
由于之前的鱼眼orbslam只有单目部分,所以在优化时也只是用了单目位姿优化和三维坐标点优化,并没有将双目的优化添加进去,不知道是否对结果有影响;
这里添加双目的优化部分,主要是将添加雅克比矩阵;
orbslam中的优化部分使用了g2o库,具体的详细讲解可以参考https://zhuanlan.zhihu.com/p/58521241 讲解的很详细
这里不加赘述,主要从单目的雅克比矩阵讲解,延伸到双目的雅克比矩阵,以及带有鱼眼EUCM模型的鱼眼双目的雅克比矩阵的推导
(雅克比矩阵即为误差函数关于优化项的导数,所以depends on 优化项的个数, 雅克比矩阵的个数也不同)
1. 单目的雅克比矩阵
首先以单目位姿优化为例, 因为只对位姿做优化,所以这里采用一元边BaseUnaryEdge 进行边的定义,如下:
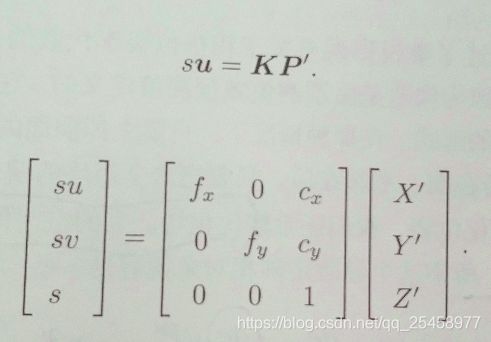
BaseUnaryEdge<2, Vector2d, VertexSE3Expmap>误差函数e的公式不在推导,可以参见SLAM十四讲P163的讲解,这里假设空间点P 经过位姿变换后在相机坐标系下的坐标为P' =[X',Y',Z']T
根据相机的投影公式,将坐标P‘ 转换到像素坐标系下公式如图:
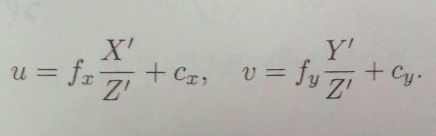
接下来要计算的误差函数就是将 实际的特征点的二维坐标 与该投影值u,v 进行比较,求差,因为理想状态下两者应该是完全一致的,但是由于位姿的误差等,导致二者不同,因此误差就是需要经二者的差值最小化,也就是最小化重投影误差函数;
首先考虑误差函数e关于扰动量的导数,利用链式法则可以写成如下形式:

因为上面u,v的公式已经明确,那么e关于P’ 的导数就可以写成
 (公式1)
(公式1)
同时,第二项P‘ 关于扰动的导数按照之前的推导为:
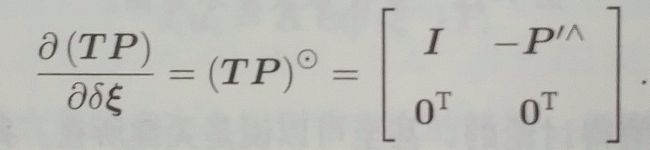
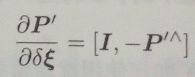
(这里需要注意,在g2o中的形式一般为[-P'^ , I ], 需要在写雅克比矩阵的时候注意一下)
这里P '^ 为三维坐标P‘ 坐标的反对成矩阵,因此 —P'^ 为在反对成矩阵的基础上添加负号即可;
|0 z -y|
-P’^ = |z 0 -x|
|-y x 0|
最终的误差关于扰动量的导数公式如下:

该公式也就对应了g20库中types_six_dof_expmap.cpp 文件中 EdgeSE3ProjectXYZOnlyPose类 对应的linearizeOplus() 中的雅克比矩阵
//这里要注意的就是g20中是P'^在前,I矩阵在后
_jacobianOplusXi(0,0) = x*y*invz_2 *fx;
_jacobianOplusXi(0,1) = -(1+(x*x*invz_2)) *fx;
_jacobianOplusXi(0,2) = y*invz *fx;
_jacobianOplusXi(0,3) = -invz *fx;
_jacobianOplusXi(0,4) = 0;
_jacobianOplusXi(0,5) = x*invz_2 *fx;
_jacobianOplusXi(1,0) = (1+y*y*invz_2) *fy;
_jacobianOplusXi(1,1) = -x*y*invz_2 *fy;
_jacobianOplusXi(1,2) = -x*invz *fy;
_jacobianOplusXi(1,3) = 0;
_jacobianOplusXi(1,4) = -invz *fy;
_jacobianOplusXi(1,5) = y*invz_2 *fy;因为只优化位姿,所以这里定义了一元边,如果是将位姿和三维坐标点一起优化,这里需要定义二元边
BaseBinaryEdge<2, Vector2D, VertexSBAPointXYZ, VertexSE3Expmap>
其中的参数分别是 定义误差函数的维数,坐标形式,顶点0的类型(这里是三维点),顶点1的类型(这里为相机的位姿)定义完成二元边后,只需要添加误差函数e关于三维空间点P(XYZ)的导数即可,根据SLAM 十四讲的推导,这里只需啊哟对之前P’的求导乘以R矩阵即可,如下:
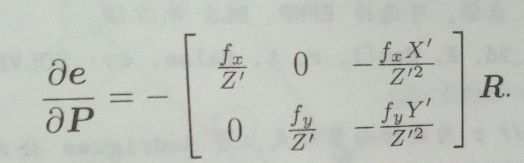
具体的代码部分可以参考 g2o 库中types_six_dof_expmap.cpp 文件中EdgeSE3ProjectXYZ::linearizeOplus() 函数:只需要添加一个雅克比项即可,但是需要注意的这里要先添加对三维点的优化,再添加对位姿的优化:
Matrix tmp;
tmp(0,0) = fx;
tmp(0,1) = 0;
tmp(0,2) = -x/z*fx;
tmp(1,0) = 0;
tmp(1,1) = fy;
tmp(1,2) = -y/z*fy;
_jacobianOplusXi = -1./z * tmp * T.rotation().toRotationMatrix(); 2. 普通相机双目优化公式:
普通相机的双目优化时,在误差项求解时,除了要优化左相机中的特征点的测量值和观测值之间的差值,还包括右目中对应特征点的横坐标的观测值与测量值之间的关系;
因此测量值相关公式由两个变成三个,如下:
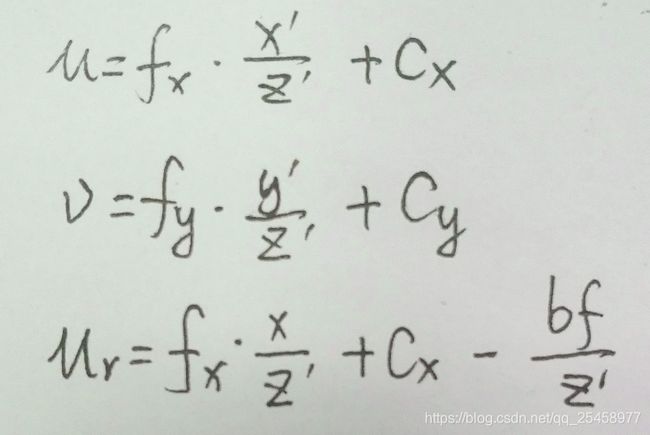
公式改变带来的主要是公式1中误差函数关于相机坐标系下的坐标点的导数,雅克比矩阵也由最开是2x6变成3x6的矩阵
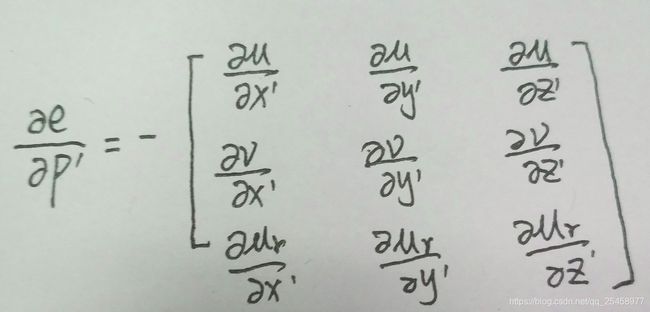
只需要按照这个顺序依次求导带入即可,对应的相关代码为:g2o 库中types_six_dof_expmap.cpp 文件中 EdgeStereoSE3ProjectXYZ::linearizeOplus() 函数对应的雅克比矩阵的下半部分:
_jacobianOplusXj(2,0) = _jacobianOplusXj(0,0)-bf*y/z_2;
_jacobianOplusXj(2,1) = _jacobianOplusXj(0,1)+bf*x/z_2;
_jacobianOplusXj(2,2) = _jacobianOplusXj(0,2);
_jacobianOplusXj(2,3) = _jacobianOplusXj(0,3);
_jacobianOplusXj(2,4) = 0;
_jacobianOplusXj(2,5) = _jacobianOplusXj(0,5)-bf/z_2;同理,对坐标点的优化也要相应的变成3x3;