09 基变换
基变换
- 基本概念
- 坐标转换
-
- 詹妮弗坐标系→平面直角坐标系
- 平面直角坐标系→詹妮弗坐标系
- 转换对比
- 基本原则
这是关于3Blue1Brown "线性代数的本质"的学习笔记。
基本概念
对于右手平面直角坐标系,一般用 i ⃗ \vec{i} i和 j ⃗ \vec{j} j表示其基向量。当然也可以在平面上另外建一个坐标系,也就是说,选择其他的基向量来对所有向量进行表示。
假设詹妮弗自己建了个新坐标系,把一组基向量表示为 b ⃗ 1 = [ 2 , 1 ] T \vec{b}_{1}=[2,1]^{T} b1=[2,1]T和 b ⃗ 2 = [ − 1 , 1 ] T \vec{b}_{2}=[-1,1]^{T} b2=[−1,1]T,这里的坐标值还是在 i ⃗ \vec{i} i和 j ⃗ \vec{j} j表示的平面直角坐标系中的取值,在詹妮弗新建的坐标系中, b ⃗ 1 = [ 1 , 0 ] T \vec{b}_{1}=[1,0]^{T} b1=[1,0]T和 b ⃗ 2 = [ 0 , 1 ] T \vec{b}_{2}=[0,1]^{T} b2=[0,1]T,因为它们就是新坐标系的基向量。
不管坐标系怎么建,一个二维平面上的向量,它的长度大小是不变的,只是在不同的坐标系下,其数值表示不同。
比如,一个在平面直角坐标系下向量 [ 3 , 2 ] T [3,2]^{T} [3,2]T,在詹妮弗的坐标系下的数值表示为 [ 5 / 3 , 1 / 3 ] T [5/3,1/3]^{T} [5/3,1/3]T。
坐标转换
詹妮弗坐标系→平面直角坐标系
对于詹妮弗坐标系下的一个向量 [ − 1 , 2 ] T [-1,2]^{T} [−1,2]T,在平面直角坐标系下取值应该是 [ − 4 , 1 ] T [-4,1]^{T} [−4,1]T,计算过程如图1所示。即 − 1 b ⃗ 1 + 2 b ⃗ 2 = [ − 4 , 1 ] T -1\vec{b}_{1}+2\vec{b}_{2}=[-4,1]^{T} −1b1+2b2=[−4,1]T

进一步地,把 − 1 b ⃗ 1 + 2 b ⃗ 2 = [ − 4 , 1 ] T -1\vec{b}_{1}+2\vec{b}_{2}=[-4,1]^{T} −1b1+2b2=[−4,1]T进行改写:
− 1 b ⃗ 1 + 2 b ⃗ 2 = − 1 [ 2 1 ] + 2 [ − 1 1 ] = [ 2 − 1 1 1 ] [ − 1 2 ] = [ − 4 1 ] \begin{aligned} -1\vec{b}_{1}+2\vec{b}_{2} &=-1 \begin{bmatrix} \ 2 \\ \ 1 \\ \end{bmatrix} +2 \begin{bmatrix} \ -1 \\ \ 1 \\ \end{bmatrix} \\ &= \begin{bmatrix} \ 2 & -1 \\ \ 1 & 1 \\ \end{bmatrix} \begin{bmatrix} \ -1 \\ \ 2 \\ \end{bmatrix} \\ &= \begin{bmatrix} \ -4 \\ \ 1 \\ \end{bmatrix} \end{aligned} −1b1+2b2=−1[ 2 1]+2[ −1 1]=[ 2 1−11][ −1 2]=[ −4 1]
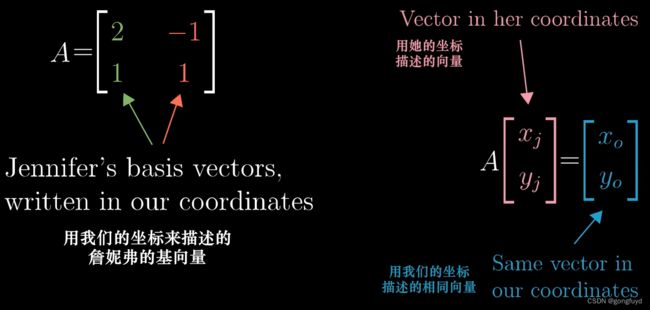
上式中,矩阵的列代表的是在平面直角坐标系下詹妮弗坐标系的基向量。
直观解释:一个矩阵的列为詹妮弗坐标系的基向量在平面直角坐标系下的坐标,这个矩阵可以看作一个线性变换,它将平面直角坐标系的基向量 i ⃗ = [ 1 , 0 ] T \vec{i}=[1,0]^{T} i=[1,0]T和 j ⃗ = [ 0 , 1 ] T \vec{j}=[0,1]^{T} j=[0,1]T变换为詹妮弗坐标系下的基向量 b ⃗ 1 = [ 1 , 0 ] T \vec{b}_{1}=[1,0]^{T} b1=[1,0]T和 b ⃗ 2 = [ 0 , 1 ] T \vec{b}_{2}=[0,1]^{T} b2=[0,1]T。
这个矩阵就是从詹妮弗坐标系到平面直角坐标系进行转换的转换矩阵。
平面直角坐标系→詹妮弗坐标系
反过来,假设在平面直角坐标系下为 [ 3 , 2 ] T [3,2]^{T} [3,2]T的向量,它在詹妮弗坐标系下取值如何?
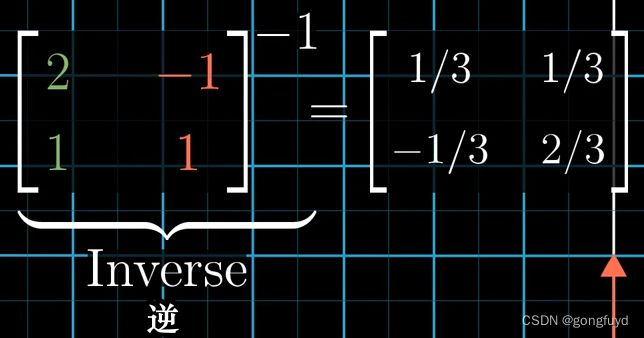
这种情况下的转换矩阵就是詹妮弗坐标系到平面直角坐标系进行转换的转换矩阵的逆。

这两个转换矩阵的关系如图3所示。
转换对比

基本原则
