C++使用serial串口通信 + ROS2示例IMU串口驱动
目录
- 一、通信协议
- 二、串口调试工具
- 三、serial库的使用
-
- 3.1 安装serial
- 3.2 serial的使用
- 3.3 绑定端口
- 四、编写IMU ROS2串口驱动
串行接口 (Serial Interface)简称串口(通常指COM接口),是采用串行通信方式的扩展接口,是指数据一位一位地顺序传送,串口通信就要解析这一位一位数据。这里使用的是亚博智能的10轴IMU模块为例介绍C++使用serial串口通信,此IMU模块为UART通信,它是一异步通讯:不需要时钟信号进行数据同步,它们直接在数据信号中穿插一些同步用的信号位,或者把主体数据进行打包,以数据帧(串口:起始位 数据 校验位(可以没有) 停止位)的格式传输数据,某些通讯中还需要双方约定数据的传输速率(波特率),以便更好地同步。例如:

- 波特率是一个衡量通信速度的参数,它表示每秒钟传送的 bit 的个数;
- 数据位是衡量通信中实际数据位的参数,当计算机发送一个信息包,标准的值是 8 位(也可以是其他,比如5,6,7);
- 停止位用于表示单个包的最后一位,典型的值为 1,1.5和 2 位,停止位不仅表示传输的结束,并且提供计算机校正时钟同步的机会;
- 奇偶校验位是串口通信中一种简单的检错方式,有四种检错方式——偶、奇、高和低,也可以没有校验位。
一、通信协议
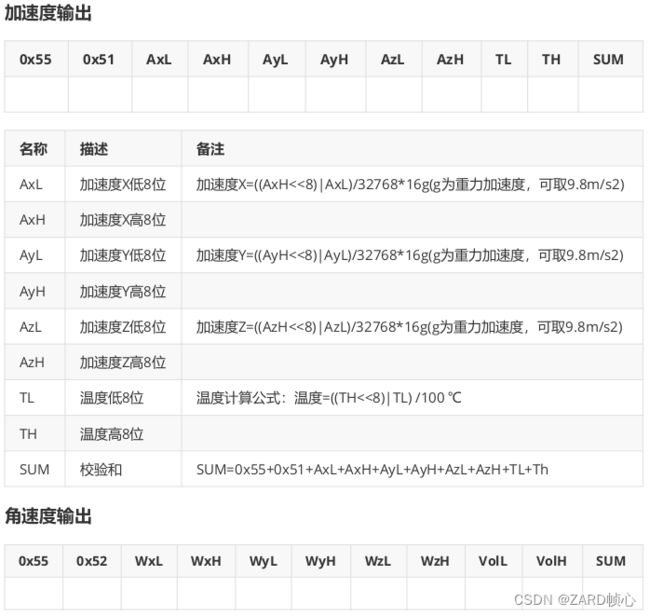
通讯协议分为物理层和协议层。物理层规定通讯系统中具有机械、电子功能部分的特性,确保原始数据在物理媒体的传输(通俗一点就是硬件部分)。协议层主要规定通讯逻辑,统一收发双方的数据打包、解包标准(软件)。使用的IMU模块(自己修改波特率406800)其通信协议(部分)如下:

数据是按照16进制方式发送的,不是ASCII码。每个数据帧(不同类型)包含11位(8bit),其中0x55为帧头,第二位TYPE为数据类型,中间8个为数据位,最后一个为检验位。写代码时注意以下三个方面:
- (1)通过0x55帧头和第二位TYPE数据类型识别数据帧;
- (2)每一个数据分
低字节和高字节(千万注意高低顺序)依次传送,二者组合成一个有符号的short类型的数据。例如数据DATA1,其中DATA1L为低字节,DATA1H为高字节。转换方法如下:假设DATA1为实际的数据,DATA1H为其高字节部分,DATA1L为其低字节部分,那么:DATA1=(short)((short)DATA1H<<8|DATA1L)。这里一定要注意DATA1H需要先强制转换为一个有符号的short类型的数据以后再移位,并且DATA1的数据类型也是有符号的short类型,这样才能表示出负数; - (3)通过检验和来检验数据SUMCRC=0x55+TYPE+DATA1L+DATA1H+DATA2L+DATA2H+DATA3L+DATA3H+DATA4L+DATA4H
SUMCRC为char型,取校验和的低8位。


二、串口调试工具
sudo apt-get install cutecom
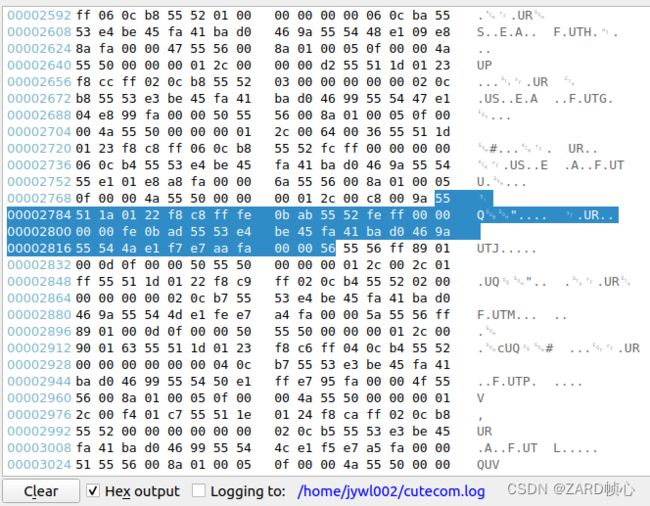
选择串口,设置波特率
 打开串口,可以查看每一位数据的十六进制和字符格式的数据输出
打开串口,可以查看每一位数据的十六进制和字符格式的数据输出

三、serial库的使用
3.1 安装serial
对于ROS1来说,可以直接安装ROS版
sudo apt-get install ros-<ros版本>-serial
Cmake配置:
find_package(catkin REQUIRED COMPONENTS
serial
)
catkin_package(
CATKIN_DEPENDS serial
)
target_link_libraries(myserial ${catkin_LIBRARIES})
但是由于ROS2没有再封装串口库serial,因此需要手动安装serial:
git clone https://github.com/ZhaoXiangBox/serial
cd serial && mkdir build
cmake .. && make
sudo make install
Cmake配置:
set(CMAKE_INSTALL_RPATH /usr/local/lib)
find_package(serial REQUIRED)
ament_target_dependencies(myserial "serial")
3.2 serial的使用
给连接的串口打开权限
sudo chmod 777 /dev/ttyUSB*
(1)首先需要添加serial的头文件
#include "serial/serial.h"
(2)实例化一个对象,之后的操作都是通过对此设置而进行的
serial::Serial serialPort;
(3)串口进行初始化
serialPort.setPort("/dev/ttyUSB0");//选择要开启的串口号
serialPort.setBaudrate(9600);//设置波特率
serial::Timeout _time =serial::Timeout::simpleTimeout(2000);//超时等待
serialPort.setTimeout(_time);
(4)开启串口
serialPort.open();//开启串口
(5)判断一下是否打开了
if(serialPort.isOpen())
{
ROS_INFO("serial port is open");
}
else
{
ROS_ERROR("serial port error");
}
(6)发送数据
先设置一个数组,注意数组类型一定是uint8_t类型的
uint8_t senddata[要发送数据的长度]={1};
定义好数组之后我们就可以给单片机发送数据了
serialPort.write(senddata,sizeof(senddata));//两个参数,第一个参数是要发送的数据地址,第二个数据是要发送数据的长度
(7)接收下位机的数据
先创建一个数组,数组类型也是uint8_t类型的
uint_8 receivedata[要接受数据的长度]={1};
接收数据的函数
serialPort.read(receivedata,sizeof(receivedata));
3.3 绑定端口
一旦出现断电或者重新插拔设备情况,代码就会出现找不到设备或者找错设备的错误,因为端口序号分配是随机的,因此我们需要绑定端口,确保每次插拔端端口一样,不需要修改代码
首先通过插拔两个端口,我们可以lsusb查看端口信息:
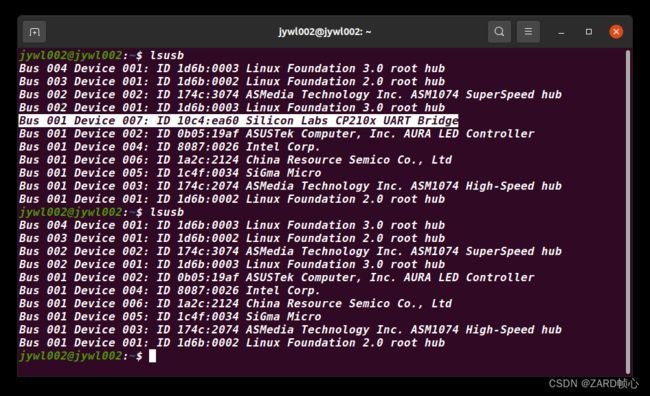
可以看到IMU端口为Bus 001 Device 007: ID 10c4:ea60 Silicon Labs CP210x UART Bridge
然后创建imu_usb.rules(随便命名)文件,填写以下内容:
KERNEL=="ttyUSB*", ATTRS{idVendor}=="10c4", ATTRS{idProduct}=="ea60", MODE:="0777", SYMLINK+="imu_usb
然后:
sudo cp imu_usb.rules /etc/udev/rules.d
service udev reload
service udev restart
重新插拔设备,输入以下指令检测绑定端口是否成功
ll /dev/imu_usb

四、编写IMU ROS2串口驱动
ROS2节点为例,首先通过串口调试工具可以看到一帧数据:
通过上面的通信协议以及串口使用方法,我编写了以下代码来实现IMU的ROS2串口驱动:
#include cmake配置如下:
cmake_minimum_required(VERSION 3.8)
project(imu_driver)
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(std_msgs REQUIRED)
find_package(tf2 REQUIRED)
find_package(sensor_msgs REQUIRED)
set(CMAKE_INSTALL_RPATH /usr/local/lib)
find_package(serial REQUIRED)
add_executable(imu_driver_exe src/imu.cpp)
target_include_directories(imu_driver_exe PUBLIC
$<BUILD_INTERFACE:${CMAKE_CURRENT_SOURCE_DIR}/include>
$<INSTALL_INTERFACE:include>)
target_compile_features(imu_driver_exe PUBLIC c_std_99 cxx_std_17) # Require C99 and C++17
ament_target_dependencies(
imu_driver_exe
"rclcpp"
"std_msgs"
"sensor_msgs"
"tf2"
"serial"
)
install(TARGETS imu_driver_exe DESTINATION lib/${PROJECT_NAME})
install(DIRECTORY launch DESTINATION share/${PROJECT_NAME})
if(BUILD_TESTING)
find_package(ament_lint_auto REQUIRED)
ament_lint_auto_find_test_dependencies()
endif()
ament_package()
package.xml配置如下:
<package format="3">
<name>gnss_imu_simname>
<version>0.0.0version>
<description>TODO: Package descriptiondescription>
<maintainer email="[email protected]">zardmaintainer>
<license>TODO: License declarationlicense>
<buildtool_depend>ament_cmakebuildtool_depend>
<depend>rclcppdepend>
<depend>std_msgsdepend>
<depend>tf2depend>
<depend>sensor_msgsdepend>
<test_depend>ament_lint_autotest_depend>
<test_depend>ament_lint_commontest_depend>
<export>
<build_type>ament_cmakebuild_type>
export>
package>
启动文件:
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
Node(
package='gnss_imu_sim',
executable='imu_driver_exe',
name='imu_driver_exe',
parameters=[{"~port_name":"/dev/imu_usb"}],
output='both'
)
])
订阅话题查看:
