【图像分类】【深度学习】【Pytorch版本】 GoogLeNet(InceptionV2)模型算法详解
【图像分类】【深度学习】【Pytorch版本】 GoogLeNet(InceptionV2)模型算法详解
文章目录
- 【图像分类】【深度学习】【Pytorch版本】 GoogLeNet(InceptionV2)模型算法详解
- 前言
- GoogLeNet(InceptionV2)讲解
-
- Batch Normalization公式
- InceptionV2结构
- InceptionV2特殊结构
- GoogLeNet(InceptionV2)模型结构
- GoogLeNet(InceptionV2) Pytorch代码
- 完整代码
- 总结
前言
GoogLeNet(InceptionV2)是由谷歌的Ioffe, Sergey等人在《Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift【ICML-2015】》【论文地址】一文中提出的带有Batch Normalization的改进模型,即在InceptionV1的基础上于卷积层与激活函数之间插入BN层,主要特点是使归一化(标准化)成为模型架构的一部分,并为每个训练小批量数据执行归一化。
GoogLeNet(InceptionV2)讲解
Internal Covariate Shift问题: 网络训练过程伴随着参数的更新,除了输入层的数据已经人为进行归一化以外,后面模型每一层的输入数据分布是会一直发生变化的,因为上一层参数的更新将导致下一层输入数据分布的变化。当每一层的输入数据分布发生变化时,后续层需要重新适应新的输入分布,增加了训练的复杂性。随着模型的深度增加,如果输入分布的变化很大,每层特征值分布会逐渐的向激活函数的输出区间的上下两端(激活函数饱和区间)靠近,长此以往网络可能会出现梯度消失或梯度爆炸的问题,从而无法继续训练模型。此外,由于每一层的输入分布变化不稳定不一致,网络很难收敛到最优解,可能会导致网络过拟合和网络训练缓慢。
为了改善卷积神经网络中的Internal Covariate Shift(ICS)效应,解决思路便是在卷积层与激活函数之间插入Batch Normalization(BN)层,Batch Normalization的来源于白化操作,白化(Whitening)是传统机器学习里面常用的一种规范化数据分布的方法,对图像提取特征之前对图像做白化操作,让输入数据具有相同的特征分布并去除特征之间的相关性,即输入数据变换成0均值、单位方差的正态分布。BN层的目的就是使输入到中间网络层的特征图满足均值为0,方差为1的分布规律。
Batch Normalization公式
BN层的计算通常是在卷积层之后,激活函数之前,对深层网络中间的特征值(或者叫隐藏值、中间值)进行标准化。在训练过程中,BN层的标准化均值和方差的计算依赖于当前batch的均值和方差,而不是整体数据的均值和方差,然后进行了变换重构,引入了可学习参数 γ γ γ、 β β β。
Batch Normalization的前向传播过程在训练和测试阶段有所不同。
训练阶段: BN层对每一批训练数据都进行归一化,即使用每一批数据各自的均值和方差,因此每一批数据的方差和标准差不同。Batch Normalization进行以下几个步骤:
- 计算 m m m个输入数据的均值: μ B ← 1 m Σ i = 1 m x i {\mu _B} \leftarrow \frac{1}{{\rm{m}}}\Sigma _{{\rm{i}} = 1}^{\rm{m}}{x_i} μB←m1Σi=1mxi
- 计算 m m m个输入数据的方差: σ B 2 ← 1 m Σ i = 1 m ( x i − μ B ) 2 \sigma _B^2 \leftarrow \frac{1}{{\rm{m}}}\Sigma _{{\rm{i}} = 1}^{\rm{m}}{\left( {{x_i} - {\mu _B}} \right)^2} σB2←m1Σi=1m(xi−μB)2
- 对 m m m个输入数据进行标准化(正太化): x i ∧ ← x i − μ B σ B 2 + ε \mathop {{x_i}}\limits^ \wedge \leftarrow \frac{{{x_i} - {\mu _B}}}{{\sqrt {\sigma _B^2 + \varepsilon } }} xi∧←σB2+εxi−μB
- 对 m m m个输入数据进行尺度和偏差变换: y i = γ x i ∧ + β {y_i} = \gamma \mathop {{x_i}}\limits^ \wedge + \beta yi=γxi∧+β
输入数据总共划分为 B B B个批量,每个批量数据量为 m m m个。
测试阶段: 一般只输入一个测试样本,使用的均值和方差是整个数据集训练后的均值和方差,通过滑动平均法计算而来。Batch Normalization进行以下几个步骤:
- 计算输入数据的均值: E [ x ] = E B [ μ B ] E\left[ x \right] = {E_B}\left[ {{\mu _B}} \right] E[x]=EB[μB]
- 计算输入数据的方差: V a r [ x ] = m m − 1 E B [ σ B 2 ] Var\left[ x \right] = \frac{{\rm{m}}}{{{\rm{m - 1}}}}{E_B}\left[ {\sigma _B^2} \right] Var[x]=m−1mEB[σB2]
- 对输入数据进行尺度和偏差变换: y = γ V a r [ x ] + ε x + ( β − γ E [ x ] V a r [ x ] + ε ) y = \frac{\gamma }{{\sqrt {Var\left[ x \right] + \varepsilon } }}x + \left( {\beta - \frac{{\gamma E\left[ x \right]}}{{\sqrt {Var\left[ x \right] + \varepsilon } }}} \right) y=Var[x]+εγx+(β−Var[x]+εγE[x])
Batch Normalization的反向传播
这部分看不懂问题也不大,博主也是花了半天才弄懂的,只是一堆求导
ℓ \ell ℓ是损失值loss
1. x i ∧ {\mathop {{x_i}}\limits^ \wedge } xi∧的梯度: ∂ ℓ ∂ x i ∧ = ∂ ℓ ∂ y i ⋅ ∂ y i ∂ x i = ∂ ℓ ∂ y i ⋅ γ \frac{{\partial \ell }}{{\partial \mathop {{x_i}}\limits^ \wedge }} = \frac{{\partial \ell }}{{\partial {{\rm{y}}_i}}} \cdot \frac{{\partial {{\rm{y}}_i}}}{{\partial {{\rm{x}}_i}}} = \frac{{\partial \ell }}{{\partial {{\rm{y}}_i}}} \cdot \gamma ∂xi∧∂ℓ=∂yi∂ℓ⋅∂xi∂yi=∂yi∂ℓ⋅γ
2. σ B 2 {\sigma _B^2} σB2的梯度: ∂ ℓ ∂ σ B 2 = { ∑ i = 1 m ∂ ℓ ∂ x i ∧ ∂ x i ∧ ∂ σ B 2 ∂ x i ∧ ∂ σ B 2 = ( x i − μ B ) − 1 2 ( σ B 2 + ε ) − 3 2 = ∑ i = 1 m ∂ ℓ ∂ x i ∧ ⋅ ( x i − μ B ) − 1 2 ( σ B 2 + ε ) − 3 2 \frac{{\partial \ell }}{{\partial \sigma _B^2}} = \left\{ {\begin{array}{c} {\sum _{{\rm{i}} = 1}^{\rm{m}}\frac{{\partial \ell }}{{\partial \mathop {{x_i}}\limits^ \wedge }}\frac{{\partial \mathop {{x_i}}\limits^ \wedge }}{{\partial \sigma _B^2}}}\\ {\frac{{\partial \mathop {{x_i}}\limits^ \wedge }}{{\partial \sigma _B^2}} = \left( {{x_i} - {\mu _B}} \right)\frac{{ - 1}}{2}{{\left( {\sigma _B^2 + \varepsilon } \right)}^{\frac{{ - 3}}{2}}}} \end{array}} \right. = \sum _{{\rm{i}} = 1}^{\rm{m}}\frac{{\partial \ell }}{{\partial \mathop {{x_i}}\limits^ \wedge }} \cdot \left( {{x_i} - {\mu _B}} \right)\frac{{ - 1}}{2}{\left( {\sigma _B^2 + \varepsilon } \right)^{\frac{{ - 3}}{2}}} ∂σB2∂ℓ=⎩ ⎨ ⎧∑i=1m∂xi∧∂ℓ∂σB2∂xi∧∂σB2∂xi∧=(xi−μB)2−1(σB2+ε)2−3=i=1∑m∂xi∧∂ℓ⋅(xi−μB)2−1(σB2+ε)2−3
3. μ B {\mu _B} μB的梯度: ∂ ℓ ∂ μ B = { ∑ i = 1 m ∂ ℓ ∂ x i ∧ ∂ x i ∧ ∂ μ B + ∂ ℓ ∂ σ B 2 ∂ σ B 2 ∂ μ B ∂ x i ∧ ∂ μ B = − 1 σ B 2 + ε ∂ σ B 2 ∂ μ B = ∑ i = 1 m − 2 ( x i − μ B ) m = ∑ i = 1 m ∂ ℓ ∂ x i ∧ ⋅ − 1 σ B 2 + ε + ∂ ℓ ∂ σ B 2 ⋅ ∑ i = 1 m − 2 ( x i − μ B ) m \frac{{\partial \ell }}{{\partial {\mu _B}}} = \left\{ {\begin{array}{c} {\sum _{{\rm{i}} = 1}^{\rm{m}}\frac{{\partial \ell }}{{\partial \mathop {{x_i}}\limits^ \wedge }}\frac{{\partial \mathop {{x_i}}\limits^ \wedge }}{{\partial {\mu _B}}} + \frac{{\partial \ell }}{{\partial \sigma _B^2}}\frac{{\partial \sigma _B^2}}{{\partial {\mu _B}}}}\\ {\frac{{\partial \mathop {{x_i}}\limits^ \wedge }}{{\partial {\mu _B}}} = \frac{{ - 1}}{{\sqrt {\sigma _B^2 + \varepsilon } }}}\\ {\frac{{\partial \sigma _B^2}}{{\partial {\mu _B}}} = \sum _{{\rm{i}} = 1}^{\rm{m}}\frac{{ - 2\left( {{x_i} - {\mu _B}} \right)}}{m}} \end{array}} \right. = \sum _{{\rm{i}} = 1}^{\rm{m}}\frac{{\partial \ell }}{{\partial \mathop {{x_i}}\limits^ \wedge }} \cdot \frac{{ - 1}}{{\sqrt {\sigma _B^2 + \varepsilon } }} + \frac{{\partial \ell }}{{\partial \sigma _B^2}} \cdot \sum _{{\rm{i}} = 1}^{\rm{m}}\frac{{ - 2\left( {{x_i} - {\mu _B}} \right)}}{m} ∂μB∂ℓ=⎩ ⎨ ⎧∑i=1m∂xi∧∂ℓ∂μB∂xi∧+∂σB2∂ℓ∂μB∂σB2∂μB∂xi∧=σB2+ε−1∂μB∂σB2=∑i=1mm−2(xi−μB)=i=1∑m∂xi∧∂ℓ⋅σB2+ε−1+∂σB2∂ℓ⋅i=1∑mm−2(xi−μB)
4. x i {x_i} xi的梯度: ∂ ℓ ∂ x i = { ∂ ℓ ∂ x i ∧ ∂ x i ∧ ∂ x i + ∂ ℓ σ B 2 σ B 2 ∂ x i + ∂ ℓ ∂ μ B ∂ μ B ∂ x i ∂ x i ∧ ∂ x i = 1 σ B 2 + ε σ B 2 ∂ x i = 2 m ( x i − μ B ) ( 1 − 1 m ) + 2 m ∑ k = 1 , k ! = i m ( x k − μ B ) ( − 1 m ) = 2 m ( x i − μ B ) + 2 m ∑ k = 1 m ( x k − μ B ) ( − 1 m ) = 2 m ( x i − μ B ) + 0 ∂ μ B ∂ x i = 1 m = ∂ ℓ ∂ x i ∧ ⋅ 1 σ B 2 + ε + ∂ ℓ σ B 2 ⋅ 2 m ( x i − μ B ) + ∂ ℓ ∂ μ B 1 m \frac{{\partial \ell }}{{\partial {x_i}}} = \left\{ {\begin{array}{c} {\frac{{\partial \ell }}{{\partial \mathop {{x_i}}\limits^ \wedge }}\frac{{\partial \mathop {{x_i}}\limits^ \wedge }}{{\partial {x_i}}} + \frac{{\partial \ell }}{{\sigma _B^2}}\frac{{\sigma _B^2}}{{\partial {x_i}}} + \frac{{\partial \ell }}{{\partial {\mu _B}}}\frac{{\partial {\mu _B}}}{{\partial {x_i}}}}\\ {\frac{{\partial \mathop {{x_i}}\limits^ \wedge }}{{\partial {x_i}}} = \frac{1}{{\sqrt {\sigma _B^2 + \varepsilon } }}}\\ {\frac{{\sigma _B^2}}{{\partial {x_i}}} = \frac{2}{m}\left( {{x_i} - {\mu _B}} \right)\left( {1 - \frac{1}{m}} \right) + \frac{2}{m}\sum _{{\rm{k}} = 1,k! = i}^{\rm{m}}\left( {{x_{\rm{k}}} - {\mu _B}} \right)\left( { - \frac{1}{m}} \right) = \frac{2}{m}\left( {{x_i} - {\mu _B}} \right) + \frac{2}{m}\sum _{{\rm{k}} = 1}^{\rm{m}}\left( {{x_{\rm{k}}} - {\mu _B}} \right)\left( { - \frac{1}{m}} \right) = \frac{2}{m}\left( {{x_i} - {\mu _B}} \right)}+0\\ {\frac{{\partial {\mu _B}}}{{\partial {x_i}}} = \frac{1}{m}} \end{array} = } \right.\frac{{\partial \ell }}{{\partial \mathop {{x_i}}\limits^ \wedge }} \cdot \frac{1}{{\sqrt {\sigma _B^2 + \varepsilon } }} + \frac{{\partial \ell }}{{\sigma _B^2}} \cdot \frac{2}{m}\left( {{x_i} - {\mu _B}} \right) + \frac{{\partial \ell }}{{\partial {\mu _B}}}\frac{1}{m} ∂xi∂ℓ=⎩ ⎨ ⎧∂xi∧∂ℓ∂xi∂xi∧+σB2∂ℓ∂xiσB2+∂μB∂ℓ∂xi∂μB∂xi∂xi∧=σB2+ε1∂xiσB2=m2(xi−μB)(1−m1)+m2∑k=1,k!=im(xk−μB)(−m1)=m2(xi−μB)+m2∑k=1m(xk−μB)(−m1)=m2(xi−μB)+0∂xi∂μB=m1=∂xi∧∂ℓ⋅σB2+ε1+σB2∂ℓ⋅m2(xi−μB)+∂μB∂ℓm1
5. γ {\gamma } γ的梯度: ∂ ℓ ∂ γ = ∑ i = 1 m ∂ ℓ ∂ y i ⋅ x i ∧ \frac{{\partial \ell }}{{\partial \gamma }} = \sum _{{\rm{i}} = 1}^{\rm{m}}\frac{{\partial \ell }}{{\partial {{\rm{y}}_i}}} \cdot \mathop {{x_i}}\limits^ \wedge ∂γ∂ℓ=i=1∑m∂yi∂ℓ⋅xi∧
6. β {\beta } β的梯度: ∂ ℓ ∂ β = ∑ i = 1 m ∂ ℓ ∂ y i \frac{{\partial \ell }}{{\partial \beta }} = \sum _{{\rm{i}} = 1}^{\rm{m}}\frac{{\partial \ell }}{{\partial {{\rm{y}}_i}}} ∂β∂ℓ=i=1∑m∂yi∂ℓ
InceptionV2结构
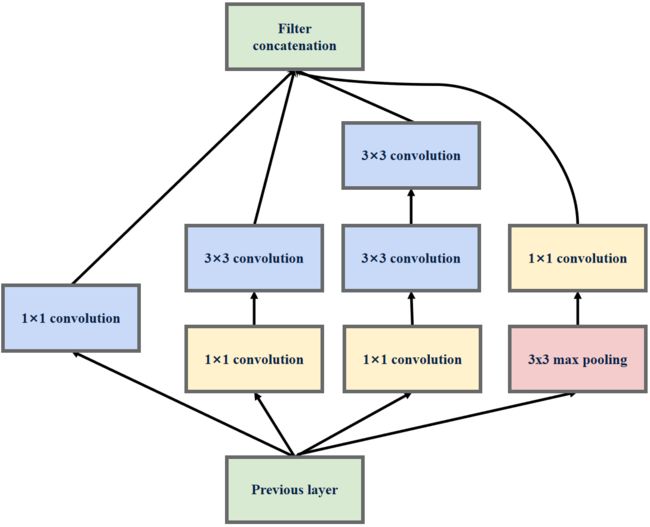
在VggNet中就提出了用小卷积核替代大卷积核,在保持感受野范围一致的前提下又减少了参数量。VggNet中通过堆叠俩个3×3的卷积核可以等效替代一个5×5的卷积核,堆叠三个3×3的卷积核可以等效替代一个7×7的卷积核,InceptionV2借鉴了这种思想将InceptionV1结构中的5×5卷积核替换为2个3×3卷积核。
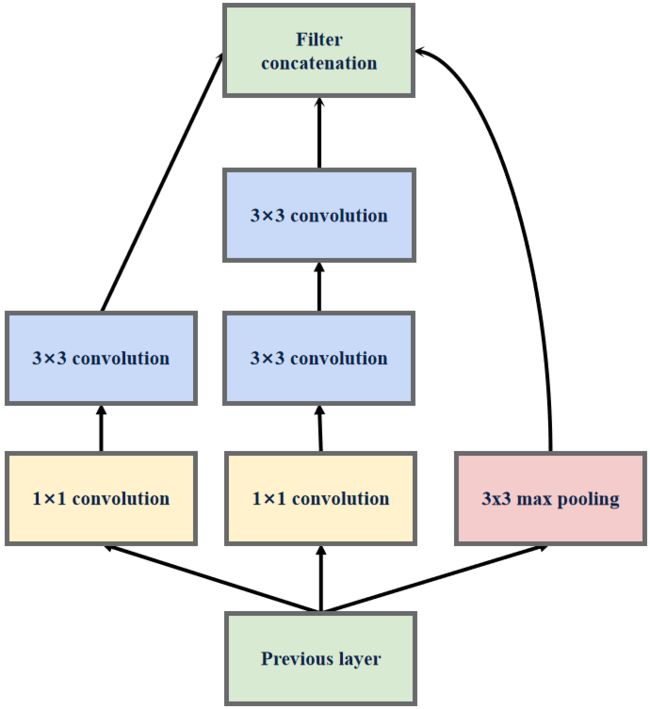
InceptionV2特殊结构
在中间层中,出现了部分特殊的InceptionV2结构,该结构舍弃了1×1卷积层分支,而在池化分支部分同样舍弃了1×1卷积层,并且该结构的输出特征图的尺寸会缩小为输入特征图尺寸的一半。
GoogLeNet(InceptionV2)模型结构
下图是原论文给出的关于 GoogLeNet(InceptionV2)模型结构的详细示意图:
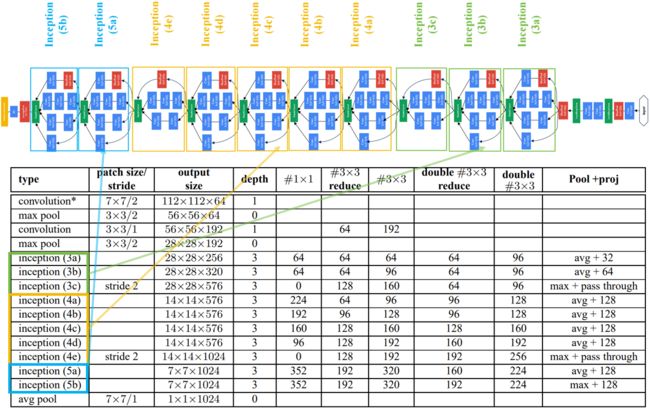
GoogLeNet(InceptionV2)模型舍弃了辅助分类器分支。
GoogLeNet在图像分类中分为两部分:backbone部分: 主要由InceptionV2模块、卷积层和池化层(汇聚层)组成,分类器部分: 由全连接层组成。
读者注意了,原始论文标注的通道数有一部分是错的,写代码时候对应不上。
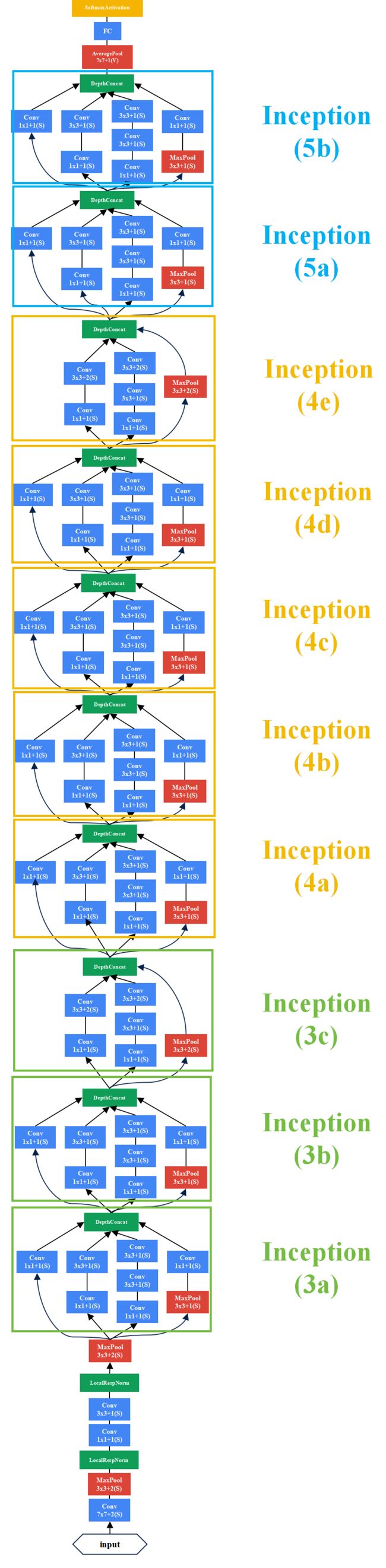
博主仿造GoogLeNet(InceptionV1)的结构绘制了以下GoogLeNet(InceptionV2)的结构。
GoogLeNet(InceptionV2) Pytorch代码
卷积层组: 卷积层+BN层+激活函数
# 卷积组: Conv2d+BN+ReLU
class BasicConv2d(nn.Module):
def __init__(self, in_channels, out_channels, kernel_size, stride=1, padding=0):
super(BasicConv2d, self).__init__()
self.conv = nn.Conv2d(in_channels, out_channels, kernel_size, stride, padding)
self.bn = nn.BatchNorm2d(out_channels)
self.relu = nn.ReLU(inplace=True)
def forward(self, x):
x = self.conv(x)
x = self.bn(x)
x = self.relu(x)
return x
InceptionV1模块: 卷积层组+池化层
# InceptionV2:BasicConv2d+MaxPool2d
class InceptionV2A(nn.Module):
def __init__(self, in_channels, ch1x1, ch3x3red, ch3x3, ch3x3redX2, ch3x3X2, pool_proj):
super(InceptionV2A, self).__init__()
# 1×1卷积
self.branch1 = BasicConv2d(in_channels, ch1x1, kernel_size=1)
# 1×1卷积+3×3卷积
self.branch2 = nn.Sequential(
BasicConv2d(in_channels, ch3x3red, kernel_size=1),
BasicConv2d(ch3x3red, ch3x3, kernel_size=3, padding=1) # 保证输出大小等于输入大小
)
# 1×1卷积++3×3卷积+3×3卷积
self.branch3 = nn.Sequential(
BasicConv2d(in_channels, ch3x3redX2, kernel_size=1),
BasicConv2d(ch3x3redX2, ch3x3X2, kernel_size=3, padding=1),
BasicConv2d(ch3x3X2, ch3x3X2, kernel_size=3, padding=1) # 保证输出大小等于输入大小
)
# 3×3池化+1×1卷积
self.branch4 = nn.Sequential(
nn.MaxPool2d(kernel_size=3, stride=1, padding=1),
BasicConv2d(in_channels, pool_proj, kernel_size=1)
)
def forward(self, x):
branch1 = self.branch1(x)
branch2 = self.branch2(x)
branch3 = self.branch3(x)
branch4 = self.branch4(x)
# 拼接
outputs = [branch1, branch2, branch3, branch4]
return torch.cat(outputs, 1)
InceptionV1特殊模块(三分支): 卷积层组+池化层
# InceptionV2:BasicConv2d+MaxPool2d
class InceptionV2B(nn.Module):
def __init__(self, in_channels, ch1x1, ch3x3red, ch3x3, ch3x3redX2, ch3x3X2, pool_proj):
super(InceptionV2B, self).__init__()
# ch1x1:没有1×1卷积
# 1×1卷积+3×3卷积,步长为2
self.branch1 = nn.Sequential(
BasicConv2d(in_channels, ch3x3red, kernel_size=1),
BasicConv2d(ch3x3red, ch3x3, kernel_size=3, stride=2, padding=1) # 保证输出大小等于输入大小
)
# 1×1卷积+3×3卷积+3×3卷积,步长为2
self.branch2 = nn.Sequential(
BasicConv2d(in_channels, ch3x3redX2, kernel_size=1),
BasicConv2d(ch3x3redX2, ch3x3X2, kernel_size=3, padding=1), # 保证输出大小等于输入大小
BasicConv2d(ch3x3X2, ch3x3X2, kernel_size=3, stride=2, padding=1) # 保证输出大小等于输入大小
)
# 3×3池化,步长为2
self.branch3 = nn.Sequential(nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
# pool_proj:池化层后不再接卷积层
完整代码
import torch.nn as nn
import torch
import torch.nn.functional as F
from torchsummary import summary
class GoogLeNetV2(nn.Module):
def __init__(self, num_classes=1000, aux_logits=True, init_weights=False):
super(GoogLeNetV2, self).__init__()
self.aux_logits = aux_logits
self.conv1 = BasicConv2d(3, 64, kernel_size=7, stride=2, padding=3)
self.maxpool1 = nn.MaxPool2d(3, stride=2, ceil_mode=True)
self.conv2 = BasicConv2d(64, 64, kernel_size=1)
self.conv3 = BasicConv2d(64, 192, kernel_size=3, padding=1)
self.maxpool2 = nn.MaxPool2d(3, stride=2, ceil_mode=True)
self.inception3a = InceptionV2A(192, 64, 64, 64, 64, 96, 32)
self.inception3b = InceptionV2A(256, 64, 64, 96, 64, 96, 64)
self.inception3c = InceptionV2B(320, 0, 128, 160, 64, 96, 0)
self.inception4a = InceptionV2A(576, 224, 64, 96, 96, 128, 128)
self.inception4b = InceptionV2A(576, 192, 96, 128, 96, 128, 128)
self.inception4c = InceptionV2A(576, 160, 128, 160, 128, 128, 128)
self.inception4d = InceptionV2A(576, 96, 128, 192, 160, 160, 128)
self.inception4e = InceptionV2B(576, 0, 128, 192, 192, 256, 0)
self.inception5a = InceptionV2A(1024, 352, 192, 320, 160, 224, 128)
self.inception5b = InceptionV2A(1024, 352, 192, 320, 160, 224, 128)
self.avgpool = nn.AdaptiveAvgPool2d((1, 1))
self.dropout = nn.Dropout(0.4)
self.fc = nn.Linear(1024, num_classes)
if init_weights:
self._initialize_weights()
def forward(self, x):
# N x 3 x 224 x 224
x = self.conv1(x)
# N x 64 x 112 x 112
x = self.maxpool1(x)
# N x 64 x 56 x 56
x = self.conv2(x)
# N x 64 x 56 x 56
x = self.conv3(x)
# N x 192 x 56 x 56
x = self.maxpool2(x)
# N x 192 x 28 x 28
x = self.inception3a(x)
# N x 256 x 28 x 28
x = self.inception3b(x)
# N x 480 x 28 x 28
x = self.inception3c(x)
# N x 480 x 14 x 14
x = self.inception4a(x)
# N x 512 x 14 x 14
x = self.inception4b(x)
# N x 512 x 14 x 14
x = self.inception4c(x)
# N x 512 x 14 x 14
x = self.inception4d(x)
# N x 512 x 14 x 14
x = self.inception4e(x)
# N x 832 x 7 x 7
x = self.inception5a(x)
# N x 832 x 7 x 7
x = self.inception5b(x)
# N x 1024 x 7 x 7
x = self.avgpool(x)
# N x 1024 x 1 x 1
x = torch.flatten(x, 1)
# N x 1024
x = self.dropout(x)
x = self.fc(x)
# N x 1000(num_classes)
return x
# 对模型的权重进行初始化操作
def _initialize_weights(self):
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
if m.bias is not None:
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.Linear):
nn.init.normal_(m.weight, 0, 0.01)
nn.init.constant_(m.bias, 0)
# InceptionV2:BasicConv2d+MaxPool2d
class InceptionV2A(nn.Module):
def __init__(self, in_channels, ch1x1, ch3x3red, ch3x3, ch3x3redX2, ch3x3X2, pool_proj):
super(InceptionV2A, self).__init__()
# 1×1卷积
self.branch1 = BasicConv2d(in_channels, ch1x1, kernel_size=1)
# 1×1卷积+3×3卷积
self.branch2 = nn.Sequential(
BasicConv2d(in_channels, ch3x3red, kernel_size=1),
BasicConv2d(ch3x3red, ch3x3, kernel_size=3, padding=1) # 保证输出大小等于输入大小
)
# 1×1卷积++3×3卷积+3×3卷积
self.branch3 = nn.Sequential(
BasicConv2d(in_channels, ch3x3redX2, kernel_size=1),
BasicConv2d(ch3x3redX2, ch3x3X2, kernel_size=3, padding=1),
BasicConv2d(ch3x3X2, ch3x3X2, kernel_size=3, padding=1) # 保证输出大小等于输入大小
)
# 3×3池化+1×1卷积
self.branch4 = nn.Sequential(
nn.MaxPool2d(kernel_size=3, stride=1, padding=1),
BasicConv2d(in_channels, pool_proj, kernel_size=1)
)
def forward(self, x):
branch1 = self.branch1(x)
branch2 = self.branch2(x)
branch3 = self.branch3(x)
branch4 = self.branch4(x)
# 拼接
outputs = [branch1, branch2, branch3, branch4]
return torch.cat(outputs, 1)
# InceptionV2:BasicConv2d+MaxPool2d
class InceptionV2B(nn.Module):
def __init__(self, in_channels, ch1x1, ch3x3red, ch3x3, ch3x3redX2, ch3x3X2, pool_proj):
super(InceptionV2B, self).__init__()
# ch1x1:没有1×1卷积
# 1×1卷积+3×3卷积,步长为2
self.branch1 = nn.Sequential(
BasicConv2d(in_channels, ch3x3red, kernel_size=1),
BasicConv2d(ch3x3red, ch3x3, kernel_size=3, stride=2, padding=1) # 保证输出大小等于输入大小
)
# 1×1卷积+3×3卷积+3×3卷积,步长为2
self.branch2 = nn.Sequential(
BasicConv2d(in_channels, ch3x3redX2, kernel_size=1),
BasicConv2d(ch3x3redX2, ch3x3X2, kernel_size=3, padding=1), # 保证输出大小等于输入大小
BasicConv2d(ch3x3X2, ch3x3X2, kernel_size=3, stride=2, padding=1) # 保证输出大小等于输入大小
)
# 3×3池化,步长为2
self.branch3 = nn.Sequential(nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
# pool_proj:池化层后不再接卷积层
def forward(self, x):
branch1 = self.branch1(x)
branch2 = self.branch2(x)
branch3 = self.branch3(x)
# 拼接
outputs = [branch1,branch2, branch3]
return torch.cat(outputs, 1)
# 卷积组: Conv2d+BN+ReLU
class BasicConv2d(nn.Module):
def __init__(self, in_channels, out_channels, kernel_size, stride=1, padding=0):
super(BasicConv2d, self).__init__()
self.conv = nn.Conv2d(in_channels, out_channels, kernel_size, stride, padding)
self.bn = nn.BatchNorm2d(out_channels)
self.relu = nn.ReLU(inplace=True)
def forward(self, x):
x = self.conv(x)
x = self.bn(x)
x = self.relu(x)
return x
if __name__ == '__main__':
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
model = GoogLeNetV2().to(device)
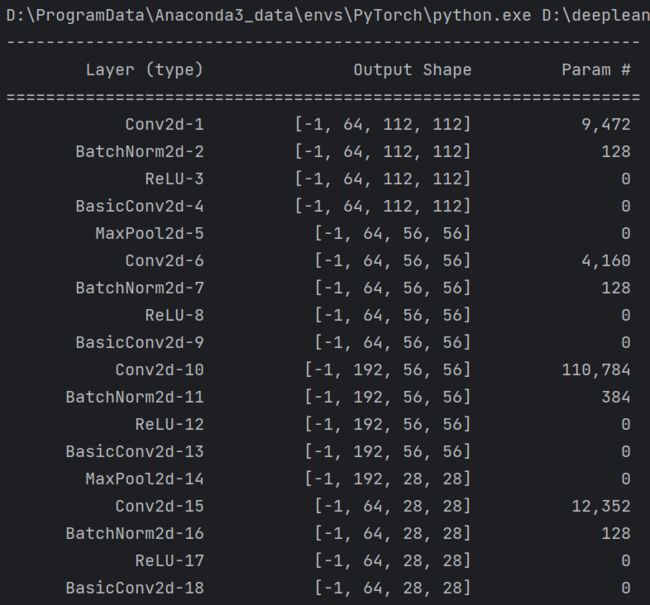
summary(model, input_size=(3, 224, 224))
summary可以打印网络结构和参数,方便查看搭建好的网络结构。
总结
尽可能简单、详细的介绍了深度可分卷积的原理和卷积过程,讲解了GoogLeNet(InceptionV2)模型的结构和pytorch代码。