ROS2学习笔记(1)ROS2+docker的配置方法
ROS2学习笔记(1)ros2+docker的配置方法
- 1. 前言
- 2. 安装docker
-
- 2.1 docker的发展史
- 2.2 什么是docker
- 2.3 docker的思想
-
- 2.3.1 集装箱
- 2.3.2 标准化
-
- 1. 运输方式
- 2. 存储方式
- 3. API接口
- 2.3.3 隔离
- 2.4 docker要解决的问题
-
- 2.4.1 系统环境不一致
- 2.4.2 系统好卡,哪个哥们又写死循环了
- 2.4.3 双11来了,服务器撑不住了
- 2.5 走进docker
-
- 2.5.1 镜像
- 2.5.2 容器
- 2.5.3 仓库
- 2.6 docker安装
- 2.7 docker指令
- 2.8 利用tmux分屏
- 3.ros2+docker配置
1. 前言
关于ROS2的介绍可移步古月居官网查看,本文仅记录自己的学习过程。
2. 安装docker
docke介绍请参考文章。
2.1 docker的发展史
2010年几个年轻人成立了一个做PAAS平台的公司dotCloud.起初公司发展的不错,不但拿到过一些融资,还获得了美国著名孵化器YCombinator的支持,后来微软谷歌亚马逊这样的大厂商也纷纷加入PAAS平台,竞争十分激烈,dotCloud举步维艰。
2013年可能是公司发展的不是很好,工程师又不想自己的努力付之东流,于是他们决定将他们的核心技术开源。这项技术就是docker。当时docker的功能就是将linux容器中的应用代码打包,可以轻松的在服务器之间进行迁移。
无心插柳柳成荫,docker技术风靡全球,于是dotCloud公司改名为docker Inc,并全面投入到docker的开发之中,并于2014.6 Docker发布了第一个版本 Docker1.0。
2.2 什么是docker
docker是一个用来装应用的容器,就像杯子可以装水,笔筒可以放笔,书包可以放书,可以把hello word放在docker中,可以把网站放入docker中,可以把任何想得到的程序放在docker中。
2.3 docker的思想
2.3.1 集装箱
没有集装箱之前运输货物,东西零散容易丢失,有了集装箱之后货物不容易丢失,我们可以把货物想象成程序,目前我们要把程序部署到一台新的机器上,可能会启动不起来,比如少一些配置文件什么的或者少了什么数据,有了docker的集装箱可以保证我们的程序不管运行在哪不会缺东西。
2.3.2 标准化
1. 运输方式
docker运输东西有一个超级码头,任何地方需要货物都由鲸鱼先送到超级码头,然后再由鲸鱼从超级码头把货物送到目的地去。对应的技术来说,比如我们要把台式机的应用部署到笔记本上,我们可能选择用QQ发过去或者用U盘拷过去,docker就标准化了这个过程,我们只需在台式机上执行一个docker命令,把鲸鱼派过来,把程序送到超级码头去,再在笔记本上执行一个docker命令,然后由鲸鱼把程序从超级码头送到笔记本上去。
2. 存储方式
当我们把程序存储到笔记本上时,我们需要一个目录,且我们要记住这个目录,因为下次我们可能还要修改,有了docker之后我们就不用记住了程序在哪里了,我们使用的时候只需要一条命令就行了。
3. API接口
docker提供了一系列rest api的接口,包含了对docker也就是对我们的应用的一个启动停止查看删除等等,如当我们要启动tomcat时我们要执行startup命令,当我们要停止时要执行shutdown命令,如果不是tomcat,我们可能还需要一些别的命令。有了docker我们记docker的命令就可以对其进行操作。
2.3.3 隔离
我们在使用虚拟机时有自己的cpu、硬盘、内存,完全感觉不到外面主机的存在,docker也差不多,不过它更轻量,我们创建虚拟机可能要几分钟,但是docker只需要一秒。最底层的技术时linux一种内核的限制机制,叫做LXC,LXC是一种轻量级的容器虚拟化技术。最大效率的隔离了进程和资源。通过cgroup、namespace等限制,隔离进程组所使用的物理资源,比如CPU、MEMORY等等,这个机制在7、8年前已经加入到linux内核了,直到2013年docker出世的时候才火起来,大家可能奇怪为什么这么好的技术埋没这么多年都没人发现呢?英雄造时势,如果没有云计算、敏捷开发、高频度的弹性伸缩需求,没有IT行业这么多年长足的发展,也就没有docker。
2.4 docker要解决的问题
2.4.1 系统环境不一致
开发:我本地没问题。运维:服务器没问题.。这个问题就变成了皮球。
如果一个应用要正常的启动起来需要什么?比如java web应用。需要一个操作系统,操作系统之上要jdk、tomcat、我们的代码、配置文件。
操作系统的改变可能会导致我们的应用开不起来,比如我们调用了某些系统命令。jdk版本也可能导致程序的运行失败。比如class文件需要1.7编译,我们装了个1.6的jdk。tomcat版本也能导致失败,比如旧的版本一些配置在新版本中不再支持。代码的话就比如应用了C盘、D盘的一个文件,或者是用了系统的一些环境编码。配置的话我们可能少了某个配置文件等等。
下面docker来了,它把操作系统、jdk、tomcat、代码、配置全部放到集装箱里。再打包放到鲸鱼上,由鲸鱼给我们送到服务器上,在我的机器上怎么运行,在别的机器上也怎么运行。不会有任何的问题。一句话就是docker解决了运行环境不一致所带来的问题。
2.4.2 系统好卡,哪个哥们又写死循环了
如果有根别人共用服务器的同学可能有这样的体会,莫名其妙发现自己的程序挂了,一查原因要不是内存不够了,要不是硬盘满了,还有就是发现某个服务变慢了,甚至敲终端都比较卡,但是linux本身就是一个多用户的操作系统本身就可以供多个用户使用,docker的隔离性可以解决这个问题,就算别人的程序还是死循环疯狂吃CPU,还是封装疯狂打日志把硬盘占满,还是内存泄漏,把内存占满,都不会导致我们的程序运行错误。因为docker在启动的时候就限定好了,它最大使用的CPU硬盘,如果超过了,就会杀掉对应进程。
2.4.3 双11来了,服务器撑不住了
大部分系统业务量并不是每天都比较平均的,特别是一些电商系统,每天总有那么几天业务量是平时的几倍甚至几十倍,如果按双11的规模去准备服务器那么对于平时的规模来说又是极大的浪费,所以就在节日前临时扩展机器,过完节再把多余的节点下线,这就给运维带来了非常大的工作量,一到过节就在各个机器上部署各种各样的服务,我们启动程序需要java、tocmat等等,并且还可能起不来还要调试,这是非常恶心的工作,有了docker一切都变得美好了,只要点一下服务器就可以从10台变成100台甚至1000、1W台,都是分分钟的事情。
为什么会这么快呢?都是用标准的方式把我们的程序运过来,下载过来,再用标准的方式把它运行起来,就可以做到只要在每台机器上都执行一两条命令,就可以让程序正常跑起来,并且不用担心有问题。
2.5 走进docker
镜像就是上面说的集装箱,仓库就是超级码头,容器就是我们运行程序的地方。docker运行程序的过程就是去仓库把镜像拉到本地,然后用一条命令把镜像运行起来变成容器。
build:构建,就是构建镜像。
ship:运输,运输镜像,从仓库和主机运输。
run:运行的镜像就是一个容器。
build、ship、run和镜像、仓库,容器是一一对应的。
2.5.1 镜像
镜像的英文名交image。前面我们讲到了集装箱,鲸鱼拖着的所有集装箱就是一个镜像。
从本质上来说镜像就是一系列文件,可以包括我们应用程序的文件,也可以包括我们应用的运行环境的文件,既然是文件,那么是以什么样的格式在本地保存的呢?
说到存储格式,就要提到linux的一个存储技术,叫做联合文件系统,是一种分层的文件系统,可以将不同的目录挂到同一个虚拟文件系统下。
比如test1下有三个文件夹,test2下有两个文件夹,还有一个readme文件。联合文件系统就是可以在一个文件夹(test)中看到多个文件夹(test1, test2)中的内容。
通过这种方式可以实现文件的分层,test1可以把它看作第一层,test2可以把它看作第二层,每一层有每一层自己的文件,docker就是利用了这种分层的概念实现了镜像存储。
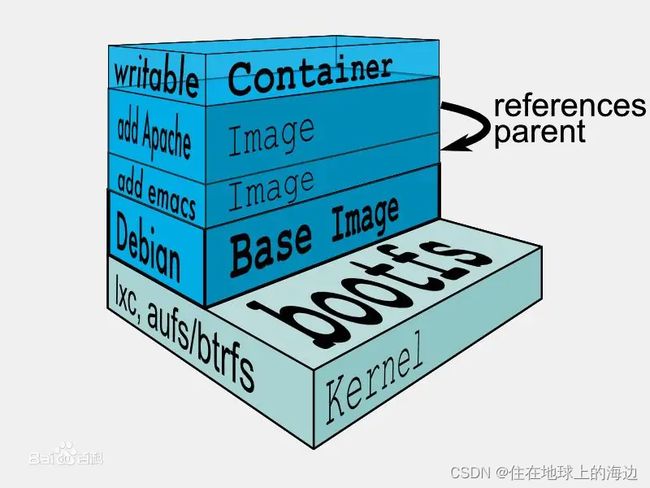
下图就是镜像的存储格式,这张图是分层的,最下面一层,上面也是一层层的好像集装箱罗列在一起。这就是镜像最直观的存储方式。下面是操作系统的引导,上面是linux操作系统,再上面是一些相关的软件,如果是我们自己的程序,就可以是tomcat、jdk,再往上是应用代码,每一层是我们自己都可以控制得,最上面一层先忽略不看,因为这是和容器有关的。注意一点,docker镜像系统的每一层都是只读的,然后把每一层加载完成之后这些文件都会被看成是同一个目录,相当于只有一个文件系统。docker的这种文件系统被称之为镜像。
2.5.2 容器
为了便于理解,大家可以把容器想象成虚拟机,每个虚拟机都有自己的文件系统,可以把图1整个一部分看成是文件系统,与虚拟机系统的区别是这里面的文件系统是一层一层的,并且最下面的n层都是只读的,只有上面一层是可写的。为什么要有可写的这层呢?大家的程序运行起来,势必会要写一些日志,写一些文件,或者对系统的某一些文件做一些修改,所以容器在最上面一层创建了可读可写的文件系统。
在程序的运行过程中,如果要写镜像文件时,因为镜像的每一层都是只读的,它会把文件的每一层拷到文件的最上层,然后再对它进行修改,修改之后,当我们的应用读一个文件时会从顶层进行查找,如果没有才会找下一层。
由于容器的最上一层是可以修改的,镜像是不能修改的,这样就能保证镜像可以生成多个容器独立运行,没有任何干扰。
2.5.3 仓库
我们的镜像是要在其它机器上运行,如何进行传输呢?
这就用到了docker仓库,我们要先把我们的镜像传到docker仓库中,再由目的地把docker仓库拉过去,这就完成了这样的一次传输过程。
谁提供了这样的仓库呢?docker自己提供了hub.docker.com,但是非常慢,为了解决这个问题,国内很多公司也在做自己的仓库。
2.6 docker安装
1 .卸载旧版本docker
sudo apt-get remove docker docker-engine docker.io containerd runc
2.更新及安装工具软件
更新系统里的所有的能更新的软件
sudo apt-get update
安装几个工具软件
\ 续行符号: 继续到下一行
curl:是字符界面的浏览器
sudo apt-get install \
apt-transport-https \
ca-certificates \
curl \
gnupg \
lsb-release
增加一个docker的官方GPG key:
gpgkey:是用来验证软件的真伪 ——防伪的
curl -fsSL https://download.docker.com/linux/ubuntu/gpg | sudo gpg --dearmor -o /usr/share/keyrings/docker-archive-keyring.gpg
下载仓库文件
echo \
"deb [arch=amd64 signed-by=/usr/share/keyrings/docker-archive-keyring.gpg] https://download.docker.com/linux/ubuntu \
$(lsb_release -cs) stable" | sudo tee /etc/apt/sources.list.d/docker.list > /dev/null
3.安装docker
再次进入系统
sudo apt-get update
安装docker-ce软件
sudo apt-get install docker-ce docker-ce-cli containerd.io -y
4.查看是否启动docker
ps aux|grep docker
5.测试运行一个docker容器
sudo docker run hello-world
下图为安装成功界面

5.docker去掉sudo权限
查看用户组及成员
sudo cat /etc/group | grep docker

可以添加docker组
sudo groupadd docker

添加用户到docker组
sudo gpasswd -a ${USER} docker

增加读写权限
sudo chmod a+rw /var/run/docker.sock

重启docker
sudo systemctl restart docker

2.7 docker指令
docker服务启动,若没有配置开机自启动,需要在每次使用docker时启动服务
sudo service docker start
docker镜像下载
docker pull [container-name]
测试安装是否成功
docker run -it [container-name]
出现以下界面表示安装完成
root@<container-id>:/#
查看镜像
sudo docker images
查看docker版本
sudo docker --version
查看本地存在的容器:
sudo docker ps -a
查看正在运行的容器
sudo docker ps
进入刚刚生成的容器
sudo docker exec -it [container-id] /bin/bash
停止容器
sudo docker stop [container-name]
启动容器
sudo docker start [container-name]
删除容器
sudo docker rm [container-name]
配置开机启动docker
systemctl start docker
systemctl enable docker
在容器中离开docker
exit
2.8 利用tmux分屏
安装tmux
sudo apt-get update
sudo apt install tmux
开启tmux
tmux
先按ctrl+b,紧接着按*%(Shift+5)。就可此分屏。
切换分屏需要先按ctrl+b*,接着按o,就可以了。
tmux使用方法如下:
1,输入命令tmux使用工具
2,上下分屏:ctrl + b 再按 "
3,左右分屏:ctrl + b 再按 %
4,切换屏幕:ctrl + b 再按o
5,关闭一个终端:ctrl + b 再按x
6,上下分屏与左右分屏切换: ctrl + b 再按空格键
3.ros2+docker配置
ros2 docker镜像下载
docker pull osrf/ros:humble-desktop
宿主机开启xhost,使得docker里面可视化界面(vscode rviz)
xhost(参数)
//+:关闭访问控制,允许任何主机访问本地的X服务器;
//-:打开访问控制,仅允许授权清单中的主机访问本地的X服务器。
注意:每次重启容器,主机都得执行一遍,否则容器内可视化报错。
启动镜像
sudo docker run -it -v /mnt/d/docker/humble_container_data_1:/data --group-add video --volume=/tmp/.X11-unix:/tmp/.X11-unix --env="DISPLAY=$DISPLAY" --env="QT_X11_NO_MITSHM=1" --name=humble_ros_2 osrf/ros:humble-desktop /bin/bash
其中,/mnt/d/docker/humble_container_data_1为自己本地创建的地址,:/data为同步到docker的/data文件目录下,用以存放ros2项目,这样的好处是本地与docker可数据同步,可根据实际情况自行设置。
必须加上:
--env="QT_X11_NO_MITSHM=1"
否则docker内部无法可视化(主机必须先执行 xhost + 命令)
此时你会发现ros2并不能运行,出现command not found ,不要着急,这是因为新终端没有自动添加环境变量,解决办法:
直接输入下面的命令追加bashrc即可
echo 'source /opt/ros/humble/setup.bash'>> ~/.bashrc
追加完成后source即可:
source ~/.bashrc
至此,ROS2+docker的配置完成。