GCN论文笔记
1.SEMI-SUPERVISED CLASSIFICATION WITH GRAPH CONVOLUTIONAL NETWORKS(GCN)
解决的是图结构上的半监督分类问题,只有一部分结点有标签


归一化后的拉普拉斯矩阵,下式中L表示拉普拉斯矩阵,D为度矩阵,A是领接矩阵:
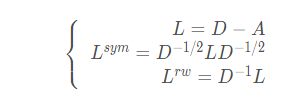
元素级别定义
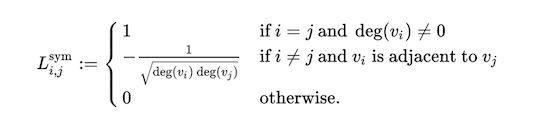
正则化的拉普拉斯矩阵,Λ是特征值对角矩阵, U为拉普拉斯矩阵L的特征值矩阵。
L = D − A L = D − 1 / 2 L D − 1 / 2 = D − 1 / 2 ( D − A ) D − 1 / 2 = D − 1 / 2 D D − 1 / 2 − D − 1 / 2 A D − 1 / 2 = I N − D − 1 / 2 A D − 1 / 2 = U Λ U T L = D-A \\ L = D^{-1/2}LD^{-1/2} = D^{-1/2}(D-A)D^{-1/2}\\=D^{-1/2}DD^{-1/2}-D^{-1/2}AD^{-1/2}\\= I_N - D^{-1/2}AD^{-1/2} = U\Lambda U^T L=D−AL=D−1/2LD−1/2=D−1/2(D−A)D−1/2=D−1/2DD−1/2−D−1/2AD−1/2=IN−D−1/2AD−1/2=UΛUT
假设:有连边 的结点可能有着相同的标签,
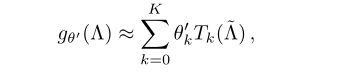
谱域GCN,先用U 做傅里叶变换,将x从空域转换成谱域,然后做图卷积操作,再变换回来

计算时间复杂度高,可由切比雪夫多项式近似
![]()

切比雪夫多项式的实现
for k in range(2, self.cheb_k):
support_set.append(torch.matmul(2 * supports, support_set[-1]) - support_set[-2])
supports = torch.stack(support_set, dim=0)
切比雪夫图卷积
x_g = torch.einsum("knm,bmc->bknc", supports, x)
x_g = x_g.permute(0, 2, 1, 3) # B, N, cheb_k, dim_in
x_gconv = torch.einsum('bnki,nkio->bno', x_g, weights) + bias #b, N, dim_out
获取对称归一化的拉普拉斯矩阵
def normalized_laplacian(w: np.ndarray) -> np.matrix:
d = np.array(w.sum(1)) #D
d_inv_sqrt = np.power(d, -0.5).flatten() #D^-1/2
d_inv_sqrt[np.isinf(d_inv_sqrt)] = 0.
print(d,d_inv_sqrt)
d_mat_inv_sqrt = np.eye(d_inv_sqrt.shape[0]) * d_inv_sqrt.shape #I_N
return np.identity(w.shape[0]) - d_mat_inv_sqrt.dot(w).dot(d_mat_inv_sqrt) #I_N - D-1/2AD-1/2
https://zhuanlan.zhihu.com/p/106687580
从谱域过度到空域,GCN所做的优化是把K阶切比雪夫降到一阶近似,每次图卷积只聚合一阶邻接结点的特征。
一阶近似是为了减少参数量,减低过拟合,空域GCN,GCN原文给的是两层的网络例子,上一层的输出是下一层的输入

其中 A ~ \widetilde{A} A 表示带上身结点信息的邻接矩阵, I N I_N IN为单位矩阵, A A A为邻接矩阵
![]()
对 A ~ \widetilde{A} A 按行求和得到结点的度矩阵 D D D:
![]()
或者写成:
![]()
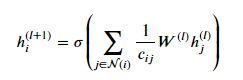
其中, N ( i ) N(i) N(i)表示结点 i i i的度
图卷积网络的公式:

其中,邻接矩阵一般使用正则化后的拉普拉斯矩阵,
![]()
拥有范围为[ 0 , 2 ] 的特征值,这将会导致数值不稳定性和梯度爆炸/消失
![]()
GCN的局限:
-
整图训练(full-batch training),耗内存和GPU,通过mini-batch随机梯度下降可缓解,对于稠密图,需要更大的K阶近似(多跳邻居结点信息)
-
不支持边的特征,邻居关系为0或1,代表有边或无边;局限于无向图。可以将有向图转换成二分无向图,并在原始图中添加表示边的节点,可以同时处理有向边和边特征
-
假设。局部性,对于有k层的邻域依赖,自连接与相邻节点边的同等重要性。可以通过参数λ来平衡
-
网络中的每一层的邻接矩阵是共享的
-
transductive,不能处理没有见过的结点,一旦图结构发生变化,需要重新训练
-
无法处理有向图,GCN是的推导是从谱图卷积来的,要求laplace矩阵是对称的,不对称的矩阵无法进行谱分解,无法做傅里叶变换
解决图卷积层网络加深效果下降:Residual Connection
每增加一层,有效上下文大小为顶点增加一个十阶邻域(对于有k层的模型)。此外,随着模型深度的增加,过度拟合可能导致参数数量增加
2.Graph Attention network(GAT)
解决的是无法区分邻接结点区分度的问题,隐式邻居结点指定不同的权重,最初提出用于解决节点分类任务
基本过程:
(1)计算注意力系数 e i e_i ei,结点特征相似度 e i , j e_{i,j} ei,j是一个常数
输入结点特征 h ∈ R N × F h∈R^{N×F} h∈RN×F, N N N为结点个数, F F F为结点特征维度
![]()
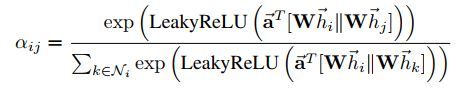
计算结点 i i i 与结点 j j j 的注意力分数
![]()
其中, h i h_i hi, h j h_j hj是一维向量,W是权重

a是一个共享的attention机制, a:R(F’)->R(F’),用来计算注意力系数,是一个可学习的参数
-
点乘
-
余弦相似度
-
标度点积 softmax(QK/√d) V
(2) 计算每个邻居结点的重要程度,即weight, α i , j ∈ [ 0 , 1 ] α_{i,j }\in[0,1] αi,j∈[0,1],用softmax进行归一化

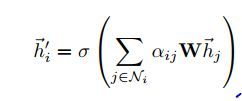
(3) 对邻居结点特征进行加权求和,σ用于增加非线性
下面是一个结点特征的具体计算实例

(4)多头注意力:
非最后一层,拼接 h’∈R(K×F)
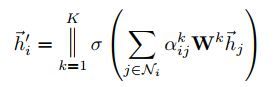
最后一层,则 K 个 Attention 的输出不进行拼接,求平均 h ′ ∈ R F h'\in R^F h′∈RF。连接就不再合理,取而代之的是采用平均法,保持维度一致,每个 h ′ ∈ R F h'\in R^F h′∈RF,而不是 h ′ ∈ R K × F h'\in R^{K×F} h′∈RK×F
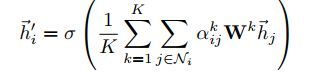
最后输出的结点特征:
![]()
GAT的图示表示:
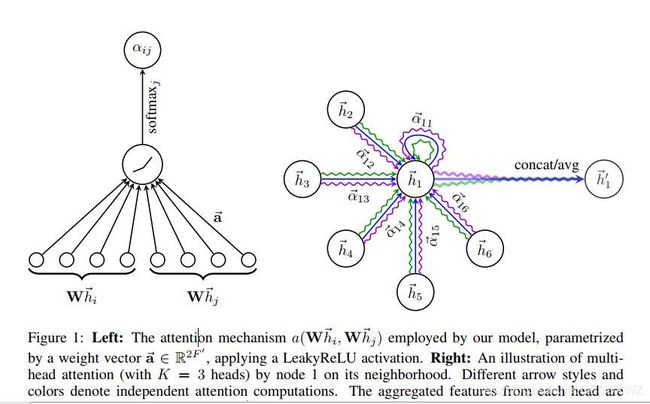
可以发现,GAT的计算全程没有邻接矩阵的参与。计算时间复杂度O(|V|FF’+|E|F’),其中,|V|FF’是结点特征变换Wh,|E|F’为计算注意力系数
GAT 不依赖于完整的图结构(A),只依赖于边E。因此可以用于 inductive 任务。
性质:
(1)操作效率高,可以并行计算
(2)通过对邻域指定任意的权值,它可以应用于不同度的图节点
(3) 可用于inductive的任务,可以泛化到没有见过的结点
(4)适用有向图,逐顶点计算的方式,摆脱了拉普拉斯的限制
比较:
(1)GCN与GAT都是将邻居顶点的特征聚合到中心顶点上,利用图的局部不变性学习新的结点表达,不同的是GCN利用了拉普拉斯矩阵,GAT利用attention系数。
GCN:
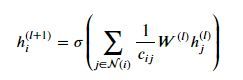
GAT:

GAT局限
(1)没有充分使用边的特征:GAT没有充分利用边的信息,只利用到了连接性,即在邻接矩阵中值为1表示有连接,值为0,表示不相连。然而,图中的边通常具有很多信息,例如强度、类型等。并且不仅仅是二进制的变量,可能是连续的、多维的。GCN能够利用一维的边的特征,也就是边的权重,但是仅限于使用一维的边的特征。
(2)原始邻居矩阵可能存在噪声:每个GAT或GCN层根据作为输入的原始邻接矩阵过滤节点特征。原始邻接矩阵可能存在噪声且不是最优的,这将限制滤波操作的有效性。
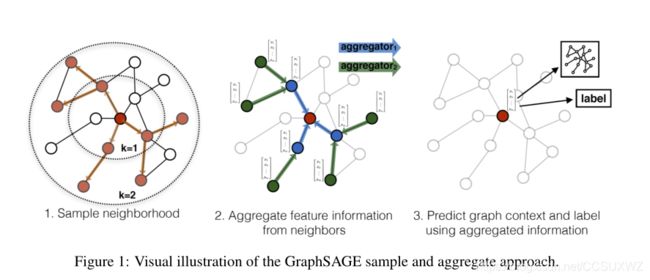
3.Inductive Representation Learning on Large Graphs (GraphSAGE)
以往工作是整图训练的,需要所有结点的参与(transductive),不能处理unseen node, 本文提出了一种inductive的方法,GraphSage , 学习一个函数,对局部的邻居结点进行采样,并聚合邻居结点的特征,在inference阶段,可以生成unseen nodes的embedding表示
到目前为止,图卷积网络(GCNs)只应用于具有固定图的transductive设置,已有的GCNs不适应于大图,被设计用来做整图分类。
Inductive learning的挑战:识别节点邻域的结构属性,这些属性既显示节点在图中的局部角色,也显示其全局位置,
GraphSAGE主要分为两个过程:sample和aggregate, 通过在学习算法中加入节点特征,同时学习每个节点邻居的拓扑结构,GraphSAGE可以学习图上的结构信息
GCN需要一个完整的图结构,full graph Laplacian;
本文的核心思想是,如何聚合局部邻居结点的特征,
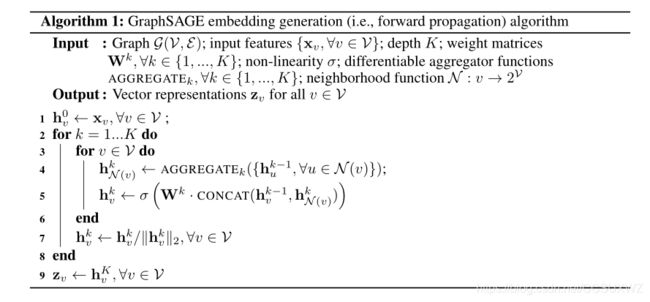
解释:输入,图结点集V,权重矩阵W,边集E
第1行,用结点v特征初始化hv,0, 第2行for迭代k次,第3行,对于每一个邻居结点,第4行,聚合上一次迭代的邻居结点特征,第5行,拼接上一次结点v的表示hv,k-1和邻居结点特征,并进行MLP变换,第7行,对结点v的特征做归一化,第9行,输出结点v的表示;
注意:采样的是固定大小(fixed size)的邻居列表
对称性:每个聚合函数是可微分的,可以适应于不同的输入排列,同时可以训练并保持高效的表示能力,
文章探索了三种不同的聚合器:
(1)Mean aggregator
类似于GCN,利用所有邻居结点,结点v的特征做平均
![]()
其中, h v k h_v^k hvk是更新后的结点v向量表示, h u k − 1 h_u^{k-1} huk−1是邻居结点的特征表示,U表示向量拼接
(2) LSTM aggregator
LSTMs的优点是表达能力更强,但是对于输入来说,它是非对称的,它们不是排列不变的。通过简单地对节点的邻居进行随机排列,来调整节点排序模型,使其在无序的集合上运行
(3) Pooling aggregator
Pooling 方式是可训练和对称的
![]()