(动手学习深度学习)第4章多层感知机
4.1 多层感知机
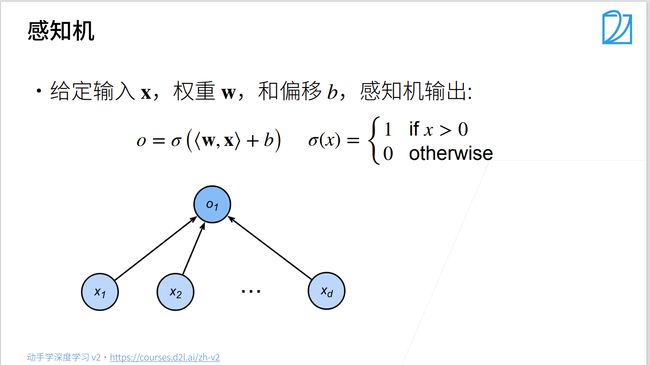
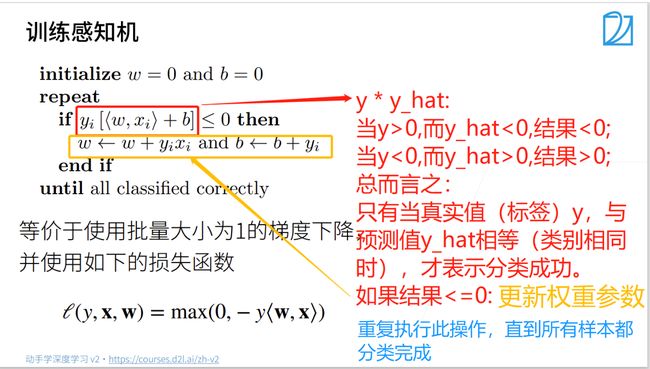
4.1.1 感知机



总结
- 感知机是一个二分类模型,是最早的模型之一
- 它的求解算法等价于使用批量大小为1的梯度下降
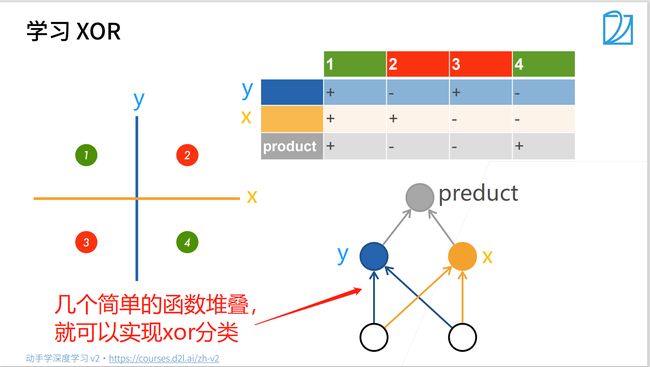
- 它不能拟合XOR函数,导致了第一次AI寒冬
4.1.2 多层感知机



总结
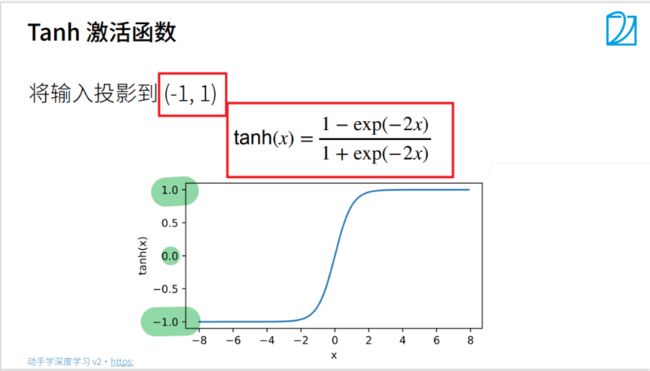
- 多层感知机使用隐藏层和激活函数来得到非线性模型
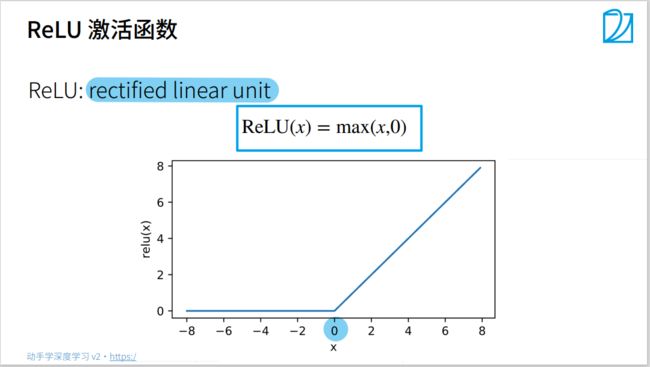
- 常用激活函数是Sigmoid, Tanh, ReLu
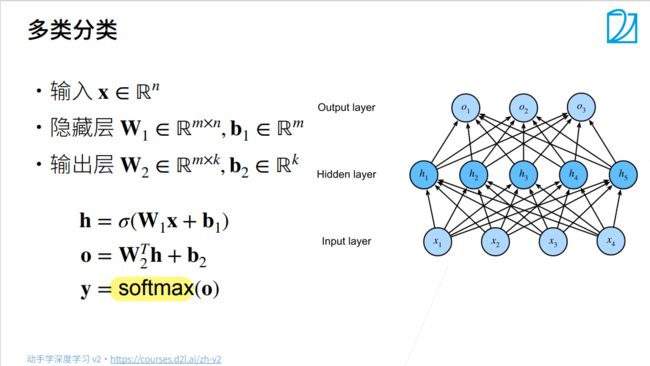
- 使用softmax来处理多分类
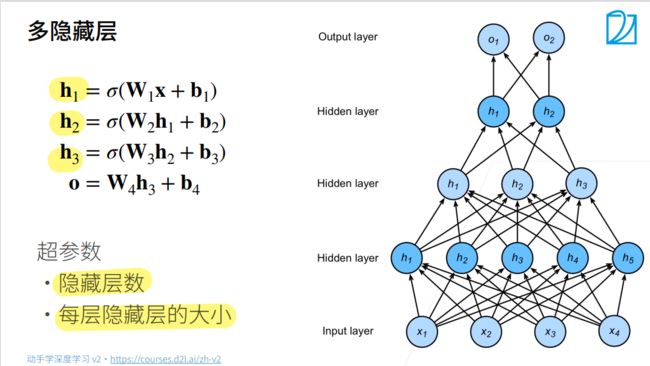
- 超参数为隐藏层数,和各个隐藏层大小
4.2 多层感知机的手动实现
导入相关库
import torch
from torch import nn
from d2l import torch as d2l
加载数据集
batch_size = 256
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size)
1. 初始化模型参数
实现一个具有单隐藏层的多层感知机,它包含256个隐藏单元
num_inputs, num_outputs, num_hiddens = 784, 10, 256
W1 = nn.Parameter( # * 0.01:缩小权重张量的数值范围,可以避免梯度爆炸或消失,提高模型的稳定性和收敛速度
torch.randn(num_inputs, num_hiddens, requires_grad=True) * 0.01) # W1: [784, 256]
b1 = nn.Parameter(torch.zeros(num_hiddens, requires_grad=True)) # b1: [256]
W2 = nn.Parameter(
torch.randn(num_hiddens, num_outputs, requires_grad=True) * 0.01) # W2: [256, 10]
b2 = nn.Parameter(torch.zeros(num_outputs, requires_grad=True)) # b2: [10]
params = [W1, b1, W2, b2]
params

2. 定义激活函数
使用ReLU激活函数
def relu(X):
a = torch.zeros_like(X) # 张量形状与X相同,但是元素数值全为0
return torch.max(X, a)
3. 定义模型
def net(X):
X = X.reshape((-1, num_inputs))
H = relu(X @ W1 + b1) # X @ W1:矩阵乘法运算相当于 X.mm(W1),X.matmul(W1)
return H @ W2 + b2
4. 定义损失函数
loss = nn.CrossEntropyLoss(reduction='none')
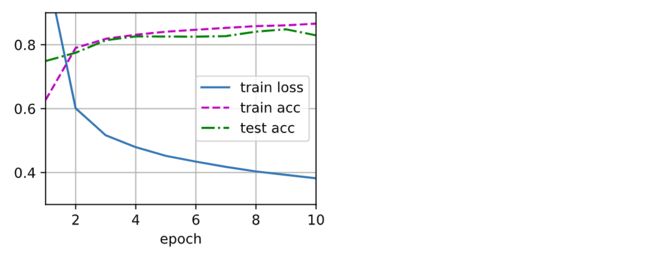
5. 训练
(训练效果上, 相较于softmax,loss降低了, 但是精度并没有上升很多)
num_epochs, lr = 10, 0.1
updater = torch.optim.SGD(params, lr=lr)
d2l.train_ch3(net, train_iter, test_iter, loss, num_epochs, updater)
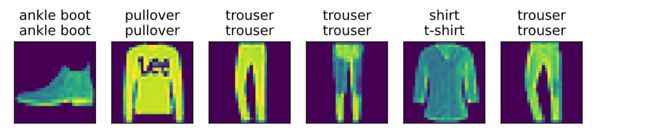
6. 预测
d2l.predict_ch3(net, test_iter)
4.3 多层感知机的简洁实现
- 相较于手动实现,就模型用的是nn模块, 其余部分均一样
1. 定义模型
net = nn.Sequential(
nn.Flatten(),
nn.Linear(784, 256),
nn.ReLU(),
nn.Linear(256, 10))
2. 初始化模型参数
def init_weights(m):
if type(m) == nn.Linear:
nn.init.normal_(m.weight, std=0.01)
net.apply(init_weights)### 4.2.1 初始化模型参数
3. 定义各种超参数
batch_size, lr, num_epochs = 256, 0.1, 10
loss = nn.CrossEntropyLoss(reduction='none')
trainer = torch.optim.SGD(net.parameters(), lr=lr)
4. 训练
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size)
d2l.train_ch3(net, train_iter, test_iter, loss, num_epochs, trainer)### 4.2.1 初始化模型参数

4.4 模型选择
4.4.1 训练误差和泛化误差

4.4.2 模型选择
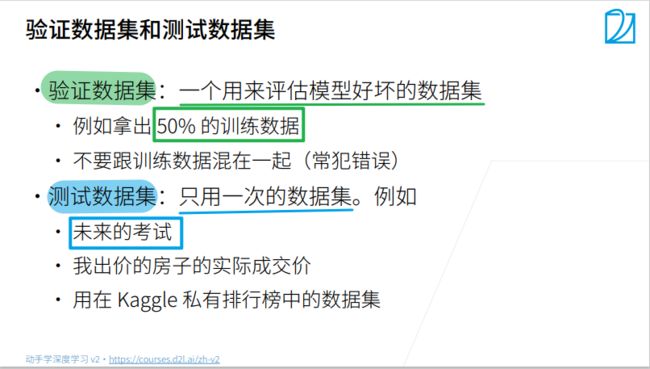
总结
- 训练数据集:训练模型参数
- 验证数据集:选择模型超参数
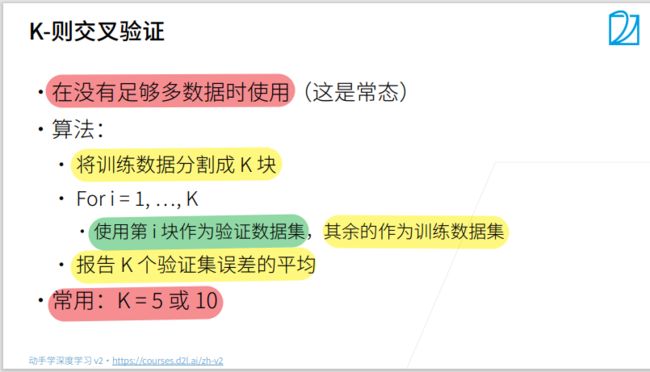
- 非大数据集上通常使用K-折交叉验证
4.4.3 过拟合和欠拟合

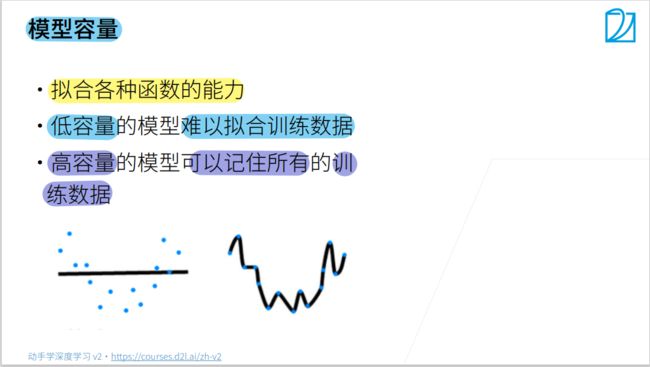


总结
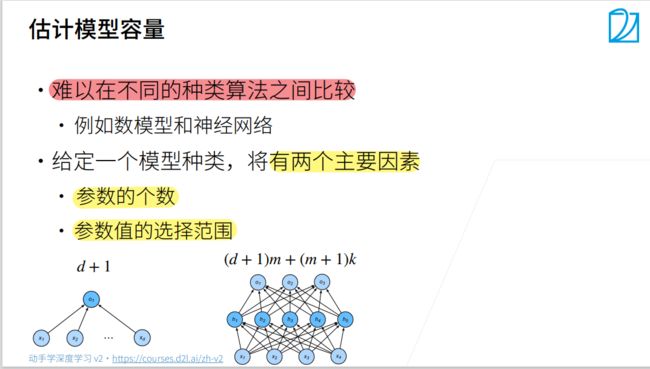
- 模型容量需要匹配数据复杂度, 否则可能导致欠拟合和过拟合
- 统计学习提供数据工具来衡量模型复杂度
- 实际中一般靠观察训练误差和验证误差
4.4.4 多项式回归
- 导入相关库
import math
import numpy as np
import torch
from torch import nn
from d2l import torch as d2l
- 生成数据集
给定x, 使用以下三阶多项式来生成训练数据和测试数据的标签:

PyTorch中的两类乘法
max_degree = 20 # 多项式的最大阶数
n_train, n_test = 100, 100 # 训练数据集和测试数据集的大小
true_w = np.zeros(max_degree) # 给权重w分配大量的空间 # w[20]
true_w[0: 4] = np.array([5, 1.2, -3.4, 5.6])
features = np.random.normal(size=(n_train + n_test, 1))
# features[200, 1]:元素为均值为0,标准差为1的正态分布
np.random.shuffle(features)
poly_features = np.power(
features, np.arange(max_degree).reshape(1, -1)) # poly_features[200, 20]
for i in range(max_degree):
poly_features[:, i] /= math.gamma(i + 1) # gamma(n) = (n-1)!
# labels的维度:(n_train + n_test, )
labels = np.dot(poly_features, true_w) # [200,20] , [20] = [200,]
labels += np.random.normal(scale=0.1, size=labels.shape) # labels = labels + 噪声
# NumPyndarray 转换为tensor
true_w, features, poly_features, labels = [torch.tensor(x, dtype=torch.float32)
for x in [true_w, features, poly_features, labels]]
features[:2], poly_features[:2, :], labels[:2]

2. 对模型进行训练和测试
实现一个函数来评估模型在给定数据集上的损失
def evaluate_loss(net, data_iter, loss):
"""评估给定数据集上模型的损失"""
metric = d2l.Accumulator(2) # 损失的总和,样本数量
for X, y in data_iter:
out = net(X)
y = y.reshape(out.shape)
l = loss(out, y)
metric.add(l.sum(), l.numel())
return metric[0] / metric[1]
定义训练函数
def train(train_features, test_features, train_labels, test_labels,
num_epochs=400):
loss = nn.MSELoss(reduction='none')
input_shape = train_features.shape[-1]
# 不设置偏置, 因为已经在多项式中实现了它
net = nn.Sequential(
nn.Linear(input_shape, 1, bias=False))
batch_size = min(10, train_labels.shape[0])
train_iter = d2l.load_array((train_features, train_labels.reshape(-1, 1)),
batch_size)
test_iter = d2l.load_array((test_features, test_labels.reshape(-1, 1)),
batch_size, is_train=False)
trainer = torch.optim.SGD(net.parameters(), lr=0.01)
animator = d2l.Animator(xlabel='epoch', ylabel='loss', yscale='log',
xlim=[1, num_epochs], ylim=[1e-3, 1e2],
legend=['train', 'test'])
for epoch in range(num_epochs):
d2l.train_epoch_ch3(net, train_iter, loss, trainer)
if epoch == 0 or (epoch + 1) % 20 == 0:
animator.add(epoch + 1, (evaluate_loss(net, train_iter, loss),
evaluate_loss(net, test_iter, loss)))
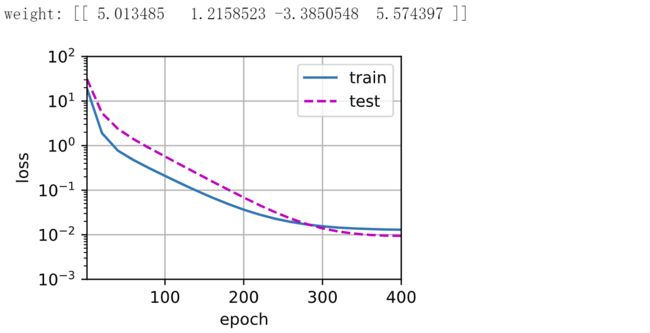
print('weight:', net[0].weight.data.numpy())
- 三阶多项式函数拟合(正常)
# 从多项式特征中选择前4个维度: 1、x、x^2/2!和x^3/3!
train(poly_features[:n_train, :4], poly_features[n_train:, :4],
labels[:n_train], labels[n_train:])
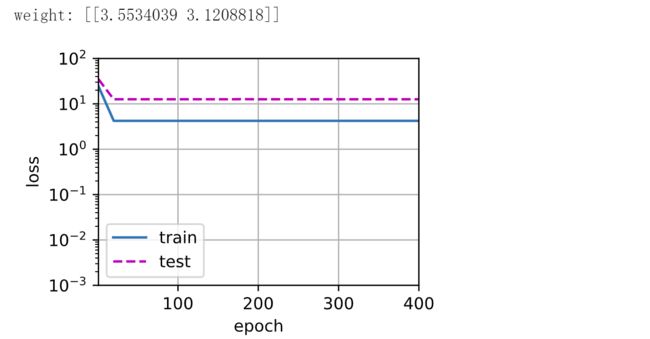
- 线性函数拟合(欠拟合)
# 从多项式特征中选择前两个维度,即1和X
train(poly_features[:n_train, :2], poly_features[n_train:, :2],
labels[:n_train], labels[n_train:])
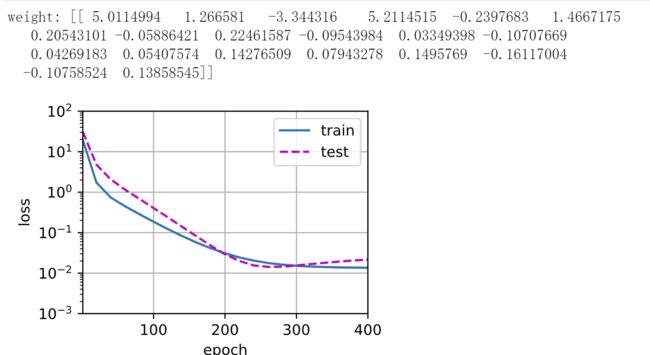
5. 高阶多项式函数拟合(过拟合)
# 从多项式特征中选取所有维度
train(poly_features[:n_train, :], poly_features[n_train:, :],
labels[:n_train], labels[n_train:])
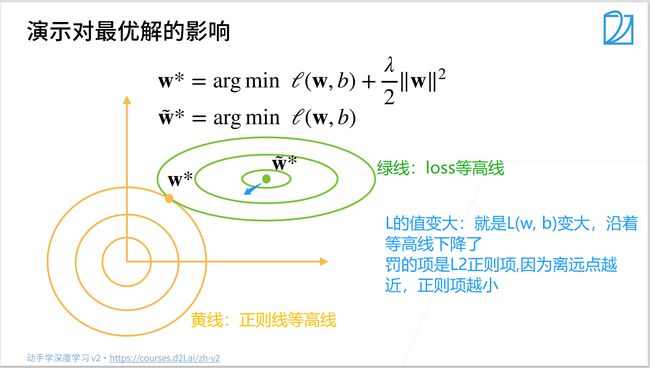
4.5 权重衰退(L2正则化)
4.5.1 范数与权重衰减



为什么使用 L 2 L_2 L2范数来进行正则化,而不是使用 L 1 L_1 L1范数?
- L 2 L_2 L2正则化线性模型构成经典的岭回归(ridge regression)算法,
- L 1 L_1 L1正则化线性回归是统计学中类似的基本模型, 通常被称为套索回归(lasso regression)。
- 使用L2范数的一个原因是它对权重向量的大分量施加了巨大的惩罚。 这使得我们的学习算法偏向于在大量特征上均匀分布权重的模型。 在实践中,这可能使它们对单个变量中的观测误差更为稳定。
- 相比之下, L 1 L_1 L1惩罚会导致模型将权重集中在一小部分特征上, 而将其他权重清除为零。 这称为特征选择(feature selection),这可能是其他场景下需要的
总结
- 权重衰退通过 L 2 L_2 L2正则化使得模型参数不会过大, 从而控制模型复杂度
- 正则项权重是控制模型复杂度的超参数
4.5.2 高维线性回归
%matplotlib inline
import torch
from torch import nn
from d2l import torch as d2l
生成数据:
y = 0.05 + ∑ i = 1 d 0.01 x i + € y = 0.05 + {\sum_{i=1}^d 0.01x_i} + € y=0.05+∑i=1d0.01xi+€ where € ~ N(0, 0.0 1 2 0.01^{2} 0.012)
n_train, n_test, num_inputs, batch_size = 20, 100, 200, 5 # 训练数据较小,很容易过拟合
true_w, true_b = torch.ones((num_inputs, 1)) * 0.01, 0.05
train_data = d2l.synthetic_data(true_w, true_b, n_train) # Generate y = Xw + b + noise
train_iter = d2l.load_array(train_data, batch_size) # Construct a PyTorch data iterator
test_data = d2l.synthetic_data(true_w, true_b, n_test)
test_iter = d2l.load_array(test_data, batch_size, is_train=False) # shuffle=is_train :是否随机打乱
4.5.3 权重衰减的手动实现
- 初始化模型参数
def init_params():
w = torch.normal(0, 1, size=(num_inputs, 1), requires_grad=True)
b = torch.zeros(1, requires_grad=True)
return [w, b]
- 定义 L 2 L_2 L2范数惩罚
def l2_penalty(w):
return torch.sum(w.pow(2)) / 2 # L2范数
# return torch.sum(torch.abs(w)) # L1范数
- 定义训练函数
def train(lambd):
w, b = init_params()
net, loss = lambda X: d2l.linreg(X, w, b), d2l.squared_loss
num_epochs, lr = 100, 0.003
animator = d2l.Animator(xlabel='epochs', ylabel='loss', yscale='log',
xlim=[5, num_epochs], legend=['train', 'test'])
for epoch in range(num_epochs):
for X, y in train_iter:
# with torch.enable_grad(): 允许计算梯度
# 增加了L2范数惩罚项
# 广播机制l2_penalty(w)成为一个长度为batch_size的向量
l = loss(net(X), y) + lambd * l2_penalty(w)
l.sum().backward()
d2l.sgd([w, b], lr, batch_size)
if (epoch + 1) % 5 == 0:
animator.add(epoch + 1, (d2l.evaluate_loss(net, train_iter, loss),
d2l.evaluate_loss(net, test_iter, loss)))
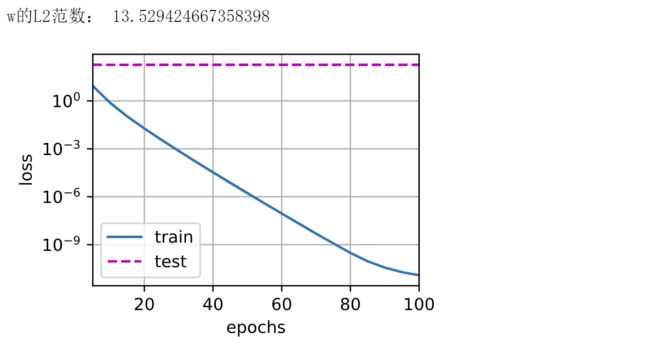
print('w2的范数是:', torch.norm(w).item())
- 忽略正则化,直接训练
train(lambd=0) # 忽略正则化直接训练

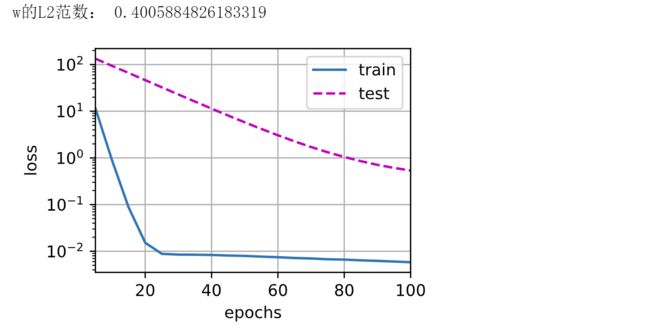
- 使用正则化,训练
train(lambd=3) # 使用权重衰减

4.5.4 权重衰减的简洁实现
def train_concise(wd):
net = nn.Sequential(
nn.Linear(num_inputs, 1))
for param in net.parameters():
param.data.normal_()
loss = nn.MSELoss(reduction='none')
num_epochs, lr = 100, 0.003
# 偏置参数没有衰减
trainer = torch.optim.SGD([{"params": net[0].weight, 'weight_decay': wd},
{"params": net[0].bias}], lr=lr)
animator = d2l.Animator(xlabel='epochs', ylabel='loss', yscale='log',
xlim=[5, num_epochs], legend=['train', 'test'])
for epoch in range(num_epochs):
for X, y in train_iter:
trainer.zero_grad()
l = loss(net(X), y)
l.mean().backward()
trainer.step()
if (epoch + 1) % 5 == 0:
animator.add(epoch + 1,
(d2l.evaluate_loss(net, train_iter, loss),
d2l.evaluate_loss(net, test_iter, loss)))
print("w的L2范数:", net[0].weight.norm().item())
train_concise(0) # 忽略正则化直接训练
train_concise(3) # 使用权重衰减
4.6 暂退法(Dropout)
4.6.1 暂退法


总结
- 丢弃法将一些输出项随机置0来控制模型复杂度
- 常作用在多层感知机的隐藏层输出上
- 丢弃概率是控制模型复杂度的超参数
- 常用技巧:在靠近输入的地方设置较低的暂退概率
4.6.2 Dropout的手动实现
- 导入相关库
import torch
from torch import nn
from d2l import torch as d2l
- 定义Dropout函数
def dropout_layer(X, dropout):
assert 0 <= dropout <= 1
if dropout == 1:
return torch.zeros_like(X)
if dropout == 0:
return X
mask = (torch.rand(X.shape) > dropout).float()
return mask * X / (1.0 - dropout) # 不用X[mask] = 0:对于cpu和gpu做乘法比选择快很多
X = torch.arange(16, dtype=torch.float32).reshape(2, 8)
print(X)
print(dropout_layer(X, 0.))
print(dropout_layer(X, 0.5))
print(dropout_layer(X, 1.))

- 定义模型参数
- 模型有两个隐藏层,每个隐藏层包含256个隐藏单元
- 靠近输入层的地方dropout设置较低的暂退概率
num_inputs, num_outputs, num_hidden1, num_hidden2 = 784, 10, 256, 256
dropout1, dropout2 = 0.2, 0.5
- 定义模型
class Net(nn.Module):
def __init__(self, num_inputs, num_outputs, num_hidden1, num_hidden2, is_training=True):
super(Net,self).__init__()
self.num_inputs = num_inputs
self.training = is_training
self.lin1 = nn.Linear(num_inputs, num_hidden1)
self.lin2 = nn.Linear(num_hidden1, num_hidden2)
self.lin3 = nn.Linear(num_hidden2, num_outputs)
self.relu = nn.ReLU()
def forward(self, X):
H1 = self.relu(self.lin1(X.reshape(-1, self.num_inputs)))
# 只有在训练模型时才使用暂退法
if self.training:
# 在第一个全连接层之后添加一个暂退层
H1 = dropout_layer(H1, dropout1)
H2 = self.relu(self.lin2(H1))
if self.training:
H2 = dropout_layer(H2, dropout2)
out = self.lin3(H2)
return out
net = Net(num_inputs, num_outputs, num_hidden1, num_hidden2)
net

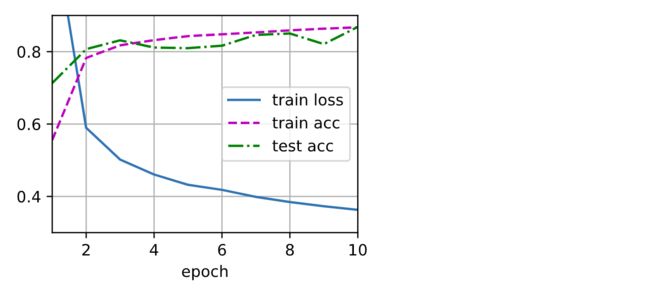
- 训练
num_epochs, lr, batch_size = 10, 0.5, 256
loss = nn.CrossEntropyLoss(reduction='none')
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size)
trainer = torch.optim.SGD(net.parameters(), lr=lr)
d2l.train_ch3(net, train_iter, test_iter, loss, num_epochs, trainer)

4.6.1 Dropout的简洁实现
- 导入相关库
import torch
from torch import nn
from d2l import torch as d2l
- 设置dropout概率
dropout1, dropout2 = 0.3, 0.5
- 定义模型
net = nn.Sequential(
nn.Flatten(),
nn.Linear(784, 256), nn.ReLU(),
# 在第一个全连接层之后添加一个暂退层
nn.Dropout(dropout1),
nn.Linear(256, 256), nn.ReLU(),
# 在第二个全连接层之后添加以一个暂退层
nn.Dropout(dropout2),
nn.Linear(256, 10))
def init_weight(m):
if type(m) == nn.Linear:
nn.init.normal_(m.weight, std=0.01)
net.apply(init_weight)
- 定义超参数
num_epochs, lr, batch_size = 10, 0.5, 256
loss = nn.CrossEntropyLoss(reduction='none')
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size)
trainer = torch.optim.SGD(net.parameters(), lr=lr)
- 训练
d2l.train_ch3(net, train_iter, test_iter, loss, num_epochs, trainer)
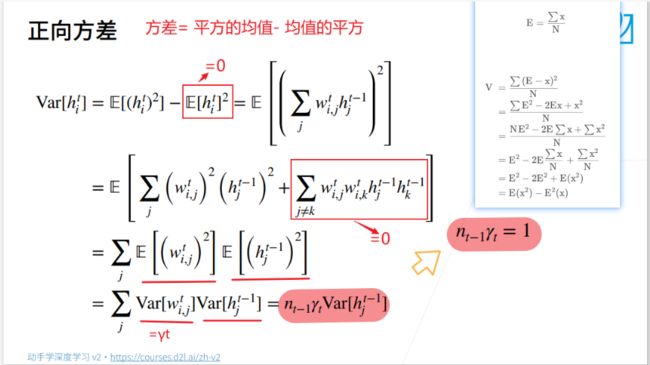
4.7 数值稳定性与模型初始化
4.7.1 数值稳定性


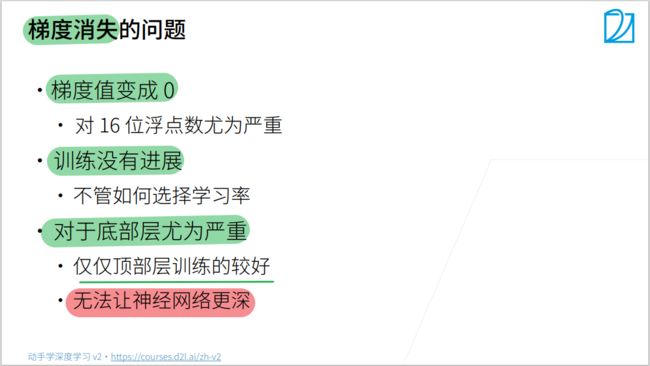
总结
- 当数值过大或者过小时导致数值问题
- 常发生在深度模型中,通常会对n个数累乘。
4.7.2 模型初始化与常用激活函数
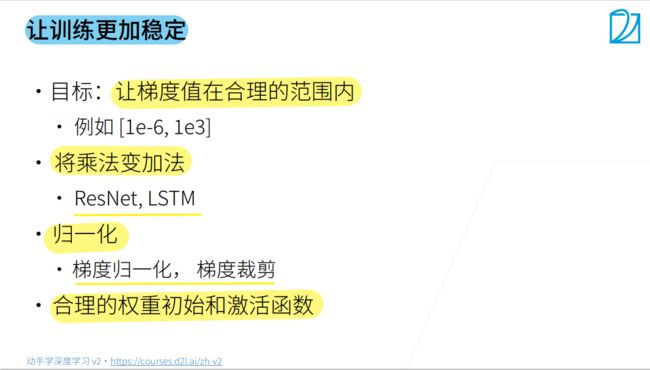

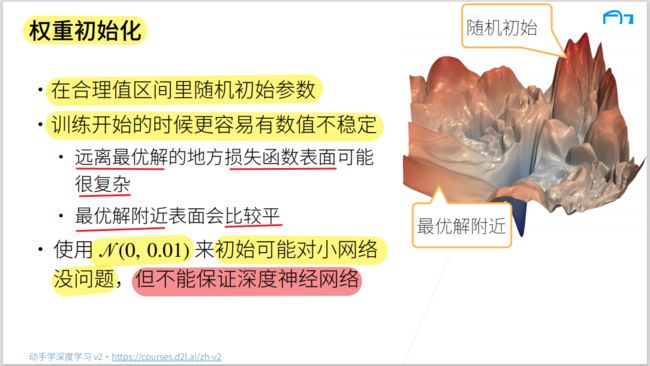
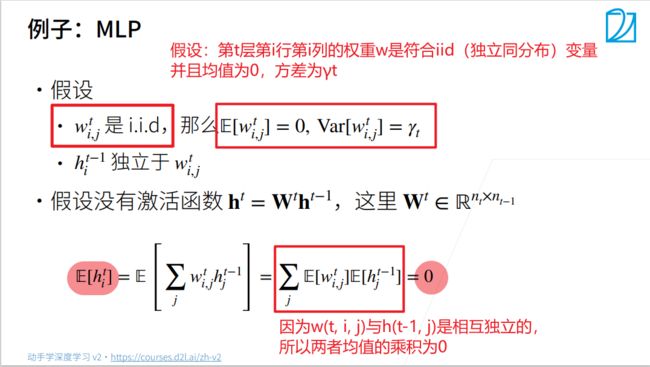
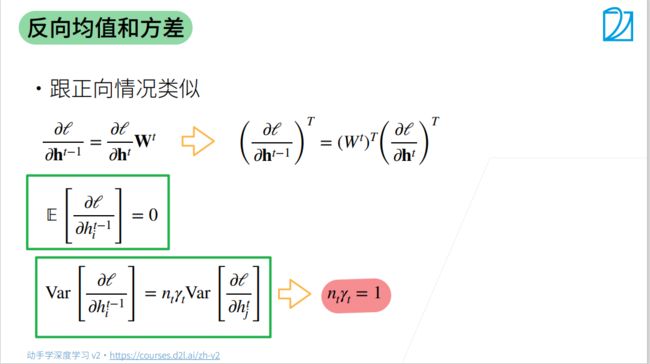
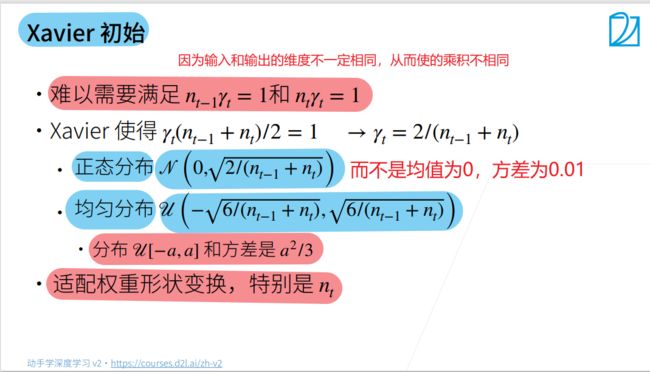



总结
- 合理的权重初始值和激活函数的选取可以提升数值稳定性
4.8 实战kaggle比赛:预测房价
hashlib库与requests库
- hashlib库中的SHA1加密函数
SHA1加密(安全哈希算法)(Secure Hash Algorithm):主要适用于数字签名标准(Digital Signature
Standard DSS)里面定义的数字签名算法(Digital Signature Algorithm
DSA),SHA1比MD5的安全性更强。对于长度小于2^ 64位的消息,SHA1会产生一个160位的消息摘要。
链接:更多加密算法
链接:hashlib的用法
# SHA1加密用法
import hashlib # 1. 在python中引用hashlib模块
sha1 = hashlib.sha1() # 2. 创建一个hash对象,使用hash算法命名的构造函数,或者通用构造函数
data = '2333333'
sha1.update(data.encode('utf-8')) # 3. 使用hash对象调用update()方法填充对象
sha1_data = sha1.hexdigest() # 4. 调用digest()(字节对象)或者hexdigest()(字符串对象)方法来获取摘要(加密结果)
print(sha1_data)
![]()
- requests库中的get()函数
requests.get():用Python像浏览器一样发送Get/Post请求,
stream=False(默认),他会立即开始下载文件并存放到内存当中,倘若文件过大就会导致内存不足的情况。
stream参数设置成True时,它不会立即开始下载,当你使用iter_content或iter_lines遍历内容或访问内容属性时才开始下载。
- 需要注意一点:文件没有下载之前,它也需要保持连接。这里就用到了另一个巧妙的库了:
- contextlib.closingiter_content:一块一块的遍历要下载的内容
- iter_lines:一行一行的遍历要下载的内容,
使用上面两个函数下载大文件可以防止占用过多的内存,因为每次只下载小部分数据。verify=True(默认): 检查证书认证
verify=False(常用): 忽略证书认证
链接:requests的用法
链接:requests 中的参数stream
链接:参数stream=True的含义
链接:request.get()参数详解
导入相关库
import hashlib # 1. 引用hashlib模块
import os
import tarfile
import zipfile
import requests # requests是使用Apache2 licensed 许可证的HTTP库
1. 下载和缓存数据集
DATA_HUB = dict()
DATA_URL = 'http://d2l-data.s3-accelerate.amazonaws.com/'
def download(name, cache_dir=os.path.join('..', 'data')):
"""下载一个DATA_HUB中的文件,返回本地文件名。"""
assert name in DATA_HUB, f'{name}不在于{DATA_HUB}.'
url, sha1_hash = DATA_HUB[name]
os.makedirs(cache_dir, exist_ok=True)
fname = os.path.join(cache_dir, url.split('/')[-1])
if os.path.exists(fname):
sha1 = hashlib.sha1() # 2. 调用加密函数来创建对象
with open(fname, 'rb') as f:
while True:
data = f.read(1048576) # 是HDFS默认的一个参数:默认是1048576:每次读取1048576字节,也就是1MB
if not data:
break
sha1.update(data) # 调用update()方法填充对象
if sha1.hexdigest() == sha1_hash: # hexdigest()(字符串对象)方法来获取摘要
return fname # 命中缓存
print(f'正在从{url}下载{fname}...')
r = requests.get(url, stream=True, verify=True)
with open(fname, 'wb') as f:
f.write(r.content)
return fname
def download_extract(name, folder=None):
"""下载并解压zip/tar文件"""
fname = download(name)
base_dir = os.path.dirname(name)
data_dir, ext = os.path.splitext(fname)
if ext == '.zip':
fp = zipfile.ZipFile(fname, 'r')
elif ext in ('.tar', '.gz'):
fp = tarfile.open(fname, 'r')
else:
assert False, '只有zip/tar文件可以被解压缩'
fp.extractall(base_dir)
return os.path.join(base_dir, folder) if folder else data_dir
def download_all():
"""下载DATA_HUB中的所有文件"""
for name in DATA_HUB:
download(name)
2. 访问和读取数据集
- 使用pandas读入并处理数据
%matplotlib inline
import numpy as np
import pandas as pd
import torch
from torch import nn
from d2l import torch as d2l
DATA_HUB['kaggle_house_train'] = ( # @save
DATA_URL + 'kaggle_house_pred_train.csv',
'585e9cc93e70b39160e7921475f9bcd7d31219ce')
DATA_HUB['kaggle_house_test'] = ( # @save
DATA_URL + 'kaggle_house_pred_test.csv',
'fa19780a7b011d9b009e8bff8e99922a8ee2eb90')
train_data = pd.read_csv(download('kaggle_house_train'))
test_data = pd.read_csv(download('kaggle_house_test'))
print(train_data.shape)
print(test_data.shape)
![]()
train_data.head()

test_data.head()
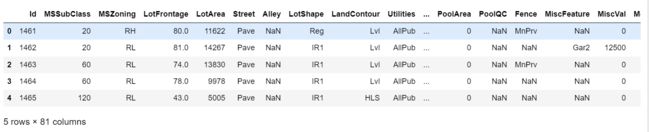
查看训练集中的前四个和最后两个特征, 以及相关标签(房价)
Pandas中loc和iloc函数(提取某几列或者行的数据)
print(train_data.iloc[0:4, [0, 1, 2, 3, -3, -2, -1]])

在每个样本中,第一个特征是ID,我们将其从数据集中删除,并将测试集的最后一列(标签)也删除
# 列表中的[1:-1] 表示从第二个元素开始到倒数第二个元素结束,[左闭, 右开)
all_features = pd.concat((train_data.iloc[:, 1:-1], test_data.iloc[:, 1:]))
all_features.shape # 81-2=79, 80-1=79
![]()
3. 数据集预处理
(1). 处理数值型数据
- 首先,将所有特征缩放到均值为0, 方差为1的正态分布,来标准化数据:(x - x.均值)/ x.标准差
- 然后,将所有缺失值替换为相应特征的平均值,即缺失值设置为0(来保证整个特征的均值是0,方差为1)
# 若无法获得测试数据,可根据训练数据计算均值和标准差
# 取出特征为数值型的所有列
numeric_features = all_features.dtypes[all_features.dtypes != 'object'].index
all_features[numeric_features] = all_features[numeric_features].apply(
lambda x: (x - x.mean()) / (x.std()))
# 在标准化数据后,所有均值消失,因此我们可以将缺失值设置为0
all_features[numeric_features] = all_features[numeric_features].fillna(0)
numeric_features
all_features

(2). 处理离散型数据
- 用一次独热编码替换它们
# dummy_na=True将na(缺失值)视为有效的特征值,并为其创建指示符特征
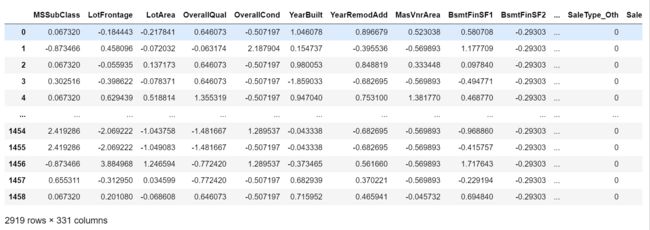
all_features = pd.get_dummies(all_features, dummy_na=True)
all_features.shape
![]()
all_features
(3). 数据类型转换
- 将样本中所有特征值从pandas格式中的ndarray格式转换成tensor,并将其数据类型设为float32。
n_train = train_data.shape[0] # train_data.shape:[1460, 81] train_data.shape[0]:1460
train_features = torch.tensor(all_features[:n_train].values, dtype=torch.float32)
test_features = torch.tensor(all_features[n_train:].values, dtype=torch.float32)
train_labels = torch.tensor(train_data.SalePrice.values.reshape(-1, 1), dtype=torch.float32)
train_features.shape, test_features.shape, train_labels.shape
![]()
4. 构建模型
定义损失函数和特征维数
loss = nn.MSELoss()
in_features = train_features.shape[1]
定义网络模型
def get_net():
net = nn.Sequential(
nn.Linear(in_features, 1)) # 331--->1
return net
定义损失函数
我们更关心相对误差(y-y_hat)/y(=1-y_hat/y), 解决这个问题的一种方法是用价格预测的对数来衡量差异。
- 因为房价的差异较大,有时候1个房10w,另一个房100w,所以要用相对误差,而不是绝对误差。
- 代码直接求的是log(y_hat/y),这样当y_hat越接近y,loss越小
def log_rmse(net, features, labels):
# 为了在取对数时进一步稳定该值, 将小于1的值设置为1
clipped_preds = torch.clamp(net(features), 1, float('inf'))
# torch.clamp()函数的功能将输入input张量每个元素的值压缩到区间 [1,+∞],并返回结果到一个新张量。
rmse = torch.sqrt(loss(torch.log(clipped_preds), torch.log(labels))) # rmse = log(y_hat)与log(y)的均方损误差在平方
# torch.sqrt():逐元素计算张量的平方根
return rmse.item()
定义优化器
训练函数借助Adam优化器
- Adam优化器的主要吸引力:在于它对初始学习率不那么敏感
def train(net, train_features, train_labels, test_features, test_labels,
num_epochs, learning_rate, weight_decay, batch_size):
train_ls, test_ls = [], []
train_iter = d2l.load_array((train_features, train_labels), batch_size)
optimizer = torch.optim.Adam(net.parameters(), lr=learning_rate, weight_decay=weight_decay)
for epoch in range(num_epochs):
for X, y in train_iter:
optimizer.zero_grad()
l = loss(net(X), y)
l.backward()
optimizer.step()
train_ls.append(log_rmse(net, train_features, train_labels))
if test_labels is not None:
test_ls.append(log_rmse(net, test_features, test_labels))
return train_ls, test_ls
5. K折交叉验证
- 把数据分为k块,将第i块拿出来作为验证集,其余k-1块重新合并作为训练集。
def get_k_fold_data(k, i, X, y):
"""把数据分为k块,将第i块拿出来作为验证集,其余k-1块重新合并作为训练集"""
assert k > 1
fold_size = X.shape[0] // k
X_train, y_train = None, None
for j in range(k):
idx = slice(j * fold_size, (j + 1) * fold_size) # 一折有多少个样本
X_part, y_part = X[idx, :], y[idx]
if j == i: # i表示第几折:
X_valid, y_valid = X_part, y_part # j == i:将第i折作为验证集
elif X_train is None: # 表示第一次出现
X_train, y_train = X_part, y_part # 就把这一折存起来,作为训练集
else:
# torch.cat():将两个张量(tensor)按指定维度拼接在一起
X_train = torch.cat([X_train, X_part], 0) # 否则,就把X_train与其余折数据合并作为验证集
y_train = torch.cat([y_train, y_part], 0)
return X_train, y_train, X_valid, y_valid
返回训练和验证误差的平均值
def k_fold(k, X_train, y_train, num_epochs, learning_rate, weight_decay, batch_size):
"""返回训练和验证误差的平均值"""
train_l_sum, valid_l_sum = 0, 0
for i in range(k):
data = get_k_fold_data(k, i, X_train, y_train)
net = get_net()
train_ls, valid_ls = train(net, *data, # *是解码,变成前面返回的四个数值
num_epochs, learning_rate, weight_decay, batch_size)
# [-1]:
# train函数返回的是整个训练中所有epoch的训练和验证损失数组,数组中每个元素是每一轮计算的损失
# 用-1表示(只取最后一轮的损失)最后一个epoch来代表这一折训练的效果
train_l_sum += train_ls[-1]
valid_l_sum += valid_ls[-1]
if i == 0: # 从0开始画图
d2l.plot(list(range(1, num_epochs + 1)), [train_ls, valid_ls],
xlabel='epoch', ylabel='rmse', xlim=[1, num_epochs],
legend=['train', 'valid'], yscale='log')
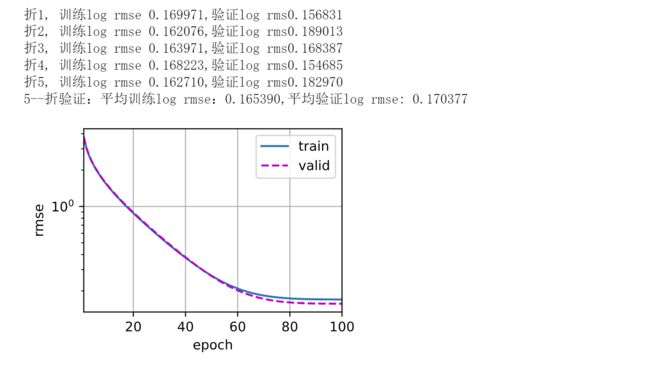
print(f'折{i + 1}, 训练log rmse {float(train_ls[-1]):f},'
f'验证log rms{float(valid_ls[-1]):f}')
return train_l_sum / k, valid_l_sum / k
6. 训练并选择模型
k, num_epochs, lr, weight_decay, batch_size = 5, 100, 5, 0, 64
train_l, valid_l = k_fold(k, train_features, train_labels,
num_epochs, lr, weight_decay, batch_size)
print(f'{k}--折验证:平均训练log rmse:{float(train_l):f},'
f'平均验证log rmse: {float(valid_l):f}')
7. 提交Kaggle预测
def train_and_pred(train_features, test_featrue, train_labels, test_data,
num_epochs, lr, weight_decay, batch_size):
net = get_net()
train_ls, _ = train(net, train_features, train_labels, None, None,
num_epochs, lr, weight_decay, batch_size)
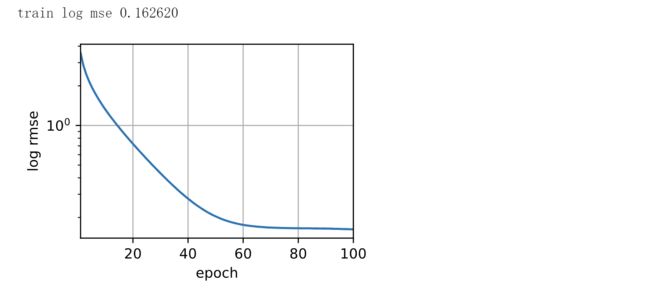
d2l.plot(np.arange(1, num_epochs + 1), [train_ls], xlabel='epoch',
ylabel='log rmse', xlim=[1, num_epochs], yscale='log')
print(f'train log mse {float(train_ls[-1]):f}')
preds = net(test_featrue).detach().numpy()
test_data['SalePrice'] = pd.Series(preds.reshape(1, -1)[0])
submission = pd.concat([test_data['Id'], test_data['SalePrice']], axis=1)
submission.to_csv('submission.csv', index=False)
train_and_pred(train_features, test_features, train_labels, test_data,
num_epochs, lr, weight_decay, batch_size)