【数据结构】八大排序(二)
目录
前言:
冒泡排序
冒泡排序代码实现
冒泡排序特性总结
快速排序
单趟排序hoare版本
单趟排序挖坑法
单趟排序快慢指针法
快速排序整体概览
快排的优化
三数取中法选key
小区间优化
前言:
上文介绍了直接插入排序,希尔排序,选择排序,堆排序并对四种排序进行了详尽的探讨,本文将以排序的基本思想,代码实现和各种排序的特性总结三个角度继续分析冒泡排序,快速排序
冒泡排序
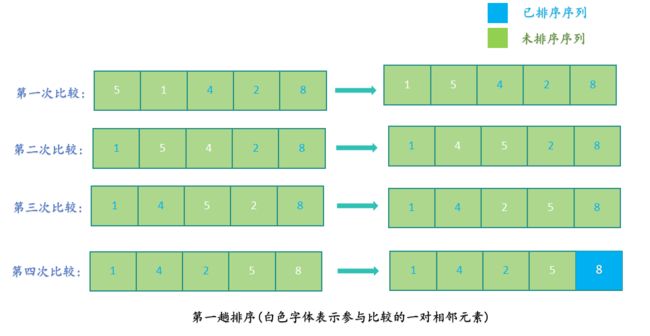
冒泡排序的基本思想:
将待排序的序列从前向后依次比较相邻元素的值,如果逆序则交换;
升序:将数组中相邻元素从前往后依次进行比较,如果前一个元素比后一个元素大,则交换,一趟下来后最大元素就在数组的末尾;
降序:将数组中相邻元素从前往后依次进行比较,如果前一个元素比后一个元素小,则交换,一趟下来后最小元素就在数组的末尾;

具体步骤如下:
- 比较待排序序列中相邻的两个元素,如果发现左边的元素比右边的元素大,则交换这两个元素;
- 每一对相邻的两个元素重复第一步的动作,从左至右依次执行,最后的元素一定是最大的元素;
- 由于最大的元素位于数组尾元素的位置,下一趟两两比较的范围为待排序序列的首元素到 倒数第二个元素所处的位置,这段范围成为新的待排序序列,重复步骤1,步骤2;
- 持续以上步骤 1, 步骤 2, 步骤 3 的工作,每重复一次需要排序的序列中少一个最右边的元素,直到没有任何一对数字需要比较排序;

......

冒泡排序代码实现
void bubblesort(int arr[], int n)
{
// 外层循环控制冒泡排序的趟数
int i = 0;
for (i = 0; i < n - 1; i++)
{
//内层循环控制要比较元素的个数
int j = 0;
for (j = 0; j < n - i - 1; j++)
{
int temp = 0;
if (arr[j]>arr[j + 1])
{
temp = arr[j];
arr[j] = arr[j + 1];
arr[j + 1] = temp;
}
}
}
}
冒泡排序特性总结
1.时间复杂度
冒泡排序的平均 时间复杂度是O(n^2),最好时间复杂度是O(n),最坏时间复杂度是O(n^2);
2. 空间复杂度
额外开辟的空间为常数个,所以空间复杂度为O(1);
3.算法稳定性
冒泡排序是一种稳定的排序算法,即相等元素的相对位置在排序前后不会发生改变;
快速排序
快速排序的基本思想:
任取待排序元素序列中的某元素作为基准值,按照该排序码将待排序集合分割成两子序列,左子序列中所有元素均小于基准值,右子序列中所有元素均大于基准值,然后对左右子序列分别递归地进行快速排序,直到所有元素都排列在相应位置上为止;
单趟排序hoare版本
思路如下:
1. 选取待排序序列最左边元素作为基准值key,定义两个指针left和right分别指向待排序序列的最左侧和最右侧,right从右向左走,left 从左向右走;
2.right先走,right指针找比基准值key小的数;left后走, left找比基准值key大的数;找到后将两个数交换位置;
3. 当left指针与right指针相遇时,将相遇位置的值与基准值key进行交换;

void swap(int* p, int* q)
{
int tmp = *p;
*p = *q;
*q = tmp;
}
//单趟排序hoare版本
int PartSort(int* a, int left, int right)
{
int keyi = left;//选取左边作为基准值,则右边先走
while (left < right)//left与right相遇,左边找大,右边找小的循环终止
{
//右边找小
while (left= a[keyi])
{
right--;
}
//左边找大
while (left 思考: 为什么left与right相遇位置处的数值比key要小?
left与right相遇有如下俩种情形:
相遇的第一种情形:right动left不动,相遇位置为left位置,left位置与前一个right位置进行了交换,交换之后left位置比key小;
相遇的第二种情形:right不动left动,相遇位置为right位置,此时left找大没有找到与right相遇,而right位置一定比key小;
思考:为什么左边取基准值key,右边先走?
保证当left与right相遇时,相遇位置小于基准值
- right 停下时,left 与 right 相遇,由于right 找比 key小的值,所以此时 right 的位置一定比key小;
- left 停下时,right 与 left 进行交换,交换后 left 指向的值比 key 小,此时 right 遇到 left 的位置一定比key小;
单趟排序挖坑法
思路如下:
1. 选择数组第一个数作为基准数,基准数的位置形成一个坑位;
2. 定义两个指针left与right分别指向待排序序列的第一个数和最后一个数;
3. 从right开始向前遍历,找到第一个小于基准数的数a[right],将其赋值给a[left],a[right]成为一个新的坑位;
4. 从left开始向后遍历,找到第一个大于基准数的数a[left],将其赋值给a[right],a[left]成为一个新的坑位;
5. 重复步骤3和4,直到left > right;
6. 将基准数填入最后一个坑中,a[left]=key;
//单趟排序挖坑法
int PartSort(int* a, int left, int right)
{
int key = a[left];
int hole = left;
while (left < right)
{
//右边先走
while (left < right && a[right] >= key)
{
right--;
}
a[hole]=a[right];
hole = right;
//左边再走
while (left < right&&a[left] <= key)
{
left++;
}
a[hole] = a[left];
hole = left;
}
a[hole] = key;
return hole;
}单趟排序快慢指针法
思路如下:
1. 选取待排序序列的第一个元素作为基准值key;
2. 定义两个指针prev和cur,prev指针指向序列开头,cur指针指向prev指针的后一个位置;
3. 从cur开始向前遍历,如果遇到比key小的元素,就将prev指针向后移动一位,并交换prev和cur指向的元素;
4. 遍历结束后,将key与prev指向的元素交换位置,此时prev指向的位置就是key的最终位置;
//单趟排序前后指针法
int PartSort(int* a, int left, int right)
{
int keyi = left;
int prev = left;
int cur = prev + 1;
while (cur <= right)
{
//(++prev)!=cur为了防止++prev与cur指向相同数值,此时交换毫无意义;
if (a[cur] < a[keyi]&&(++prev)!=cur)
{
swap(&a[cur], &a[prev]);
}
cur++;
}
swap(&a[keyi], &a[prev]);
return prev;
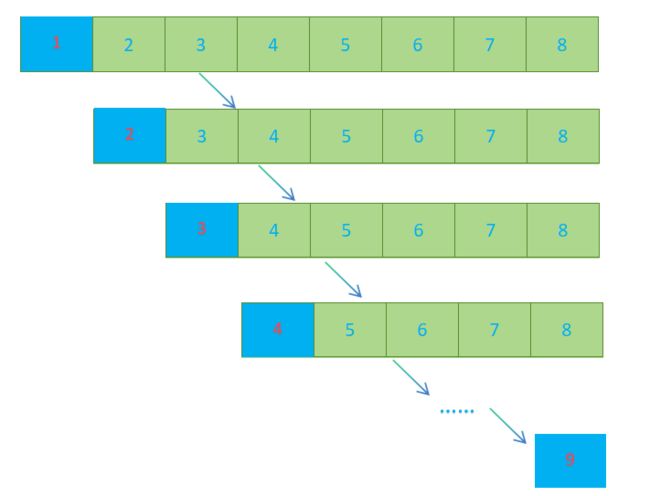
}快速排序整体概览
快速排序首先选取基准值key,将待排序序列分为两个子序列,左子序列放比基准值小的数,右子序列放比基准值大的数,然后再将子序列以以上方式同样分割,直到数组有序,下图单趟排序采取hoare版本
- 经过一趟hoare排序,区间被划分为[begin, keyi-1] U keyi U [keyi+1, end] ,单趟排序一次就会唯一确定一个元素来到最终排序所确定的位置;

- 先递归排序左子序列[begin, keyi-1] , 再递归排序右子序列[keyi+1, end],类似二叉树前序遍历;


- 根据上图可得出递归终止条件为区间不存在(begin>end)或者只有一个元素(begin=end)
void QuickSort(int*a, int begin, int end)
{
//递归终止的条件
//1.区间不存在(begin>end)或者只有一个元素(begin=end)
if (begin >= end)
return;
int keyi = PartSort3(a, begin, end);
// 一趟排序原排序区间划分为如下三部分
//[begin keyi-1]U[keyi]U[keyi+1,end]
QuickSort(a, begin, keyi - 1);
QuickSort(a, keyi + 1, end);
}快排的优化
三数取中法选key
若选取的基准值key是序列中最大或最小的数值,则快速排序的递归深度会非常深,排序效率会很低;若是一个有序数组使用快速排序,则递归深度为n,单趟排序也为n,时间复杂度为O(n^2);
假定待排序序列的左下标left , 右下标right,左右下标所对应的中间下标 midi=(left+right)/2,取三个下标所对应的值的中间值为基准值key,可以防止快排出现最差情形;
//三数取中法选keyi keyi为中间值的下标
int GetMidi(int* a, int left, int right)
{
int mid = (left + right) / 2;
if (a[left] > a[mid])
{
if (a[mid] > a[right])
{
return mid;
}
//mid为最小值
else if (a[left] > a[right])
{
return right;
}
else
{
return left;
}
}
else
{
if (a[mid] < a[right])
{
return mid;
}
//mid为最大值
else if (a[left]>a[right])
{
return left;
}
else
{
return right;
}
}
}小区间优化
由于快速排序是递归实现的,而每一次函数调用,均需要开辟函数栈帧,当递归到最后几层时,此时数组中的值其实已经接近有序,最后几层的函数调用会极大占用函数栈帧所开辟的空间;
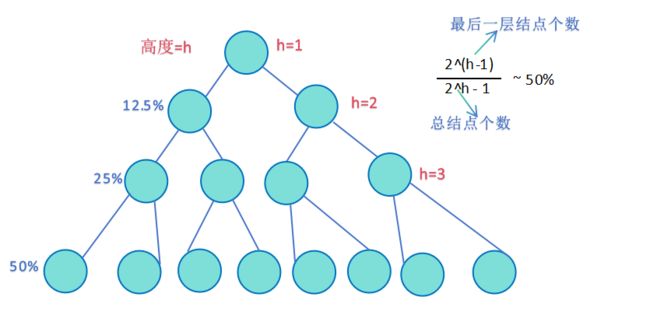
假设数组大小N=10,即二叉树节点个数N=10;

10个数值,递归了3~4层,而最后三层占据比例为87.5%,调用函数的次数就越多,开辟函数栈帧的消耗越大,导致效率下降,代价太大,在递归分割过程中,当区间较小时,不再递归分割排序,序列在递归分割过程中,子序列已经接近有序,插入排序每一次单趟排序都只向前遍历到最大值之后,一共执行n次,若数组有序,则总共只执行n次,最差情况下每次都只是从i遍历到0下标,综合考虑是执行次数最优,故选择直接插入排序进行优化;
void QuickSort(int* a, int begin, int end)
{
if (begin >= end)
return;
// 小区间优化,小区间不再递归分割排序,降低递归次数
if ((end - begin + 1) > 10)
{
int keyi = PartSort(a, begin, end);
// [begin, keyi-1] keyi [keyi+1, end]
QuickSort1(a, begin, keyi - 1);
QuickSort1(a, keyi + 1, end);
}
else
{
InsertSort(a + begin, end - begin + 1);
}
}