ROS高效入门第八章 -- 掌握rosbag工具,编写c++包录制、读取、截断和回放样例
掌握rosbag工具,编写c++包录制、读取、截断和回放样例
- 1 资料
- 2 正文
-
- 2.1 rosbag命令行工具
-
- 2.1.1 rosbag录制
- 2.1.2 rosbag查看基本信息,读取内容和截断
- 2.1.3 回放rosbag
- 2.2 C++实现rosbag命令行工具
-
- 2.2.1 C++录包样例
- 2.2.2 C++查看包样例
- 2.2.3 C++截取包样例
- 2.2.4 C++包播放样例
- 3 总结
1 资料
ROS提供了一套工具,用来记录和回放程序运行时的topic数据,即rosbag工具。这套工具对测试机器人软件非常高效,即使是自动驾驶行业,也是深度使用这个工具。
本章先介绍rosbag的命令行用法,以及rostopic处理bag包的相关命令,分别是bag录制,读取,截断和回放。最后使用 c++ 编码实现相关的命令行功能,掌握 ros 处理bag包的API。本章参考资料如下:
(1)《机器人操作系统(ROS)浅析》[美] Jason M. O’Kane 著 肖军浩 译,第9章
(2)ros Tutorials 初级教程的10,17和18节: ros Tutorials
(3)chatgpt 4.0 (写代码大量参考了chatgpt给的样例,尽管不怎么solid)
2 正文
2.1 rosbag命令行工具
2.1.1 rosbag录制
(1)本节以turtlesim软件包为基础,演示rosbag包录制。首先,开四个窗口,分别执行:
roscore
rosrun turtlesim turtlesim_node
// 这个程序负责向turtlesim_node发送运动命令,让小乌龟画四方形
rosrun turtlesim draw_square
// rosbag record是录制bag的命令,并指定topic和bag名
rosbag record -O square_cmd_1.bag /turtle1/cmd_vel /turtle1/pose
// 录制所有topic,bag名会默认以时间戳命名
rosbag record -a

2.1.2 rosbag查看基本信息,读取内容和截断
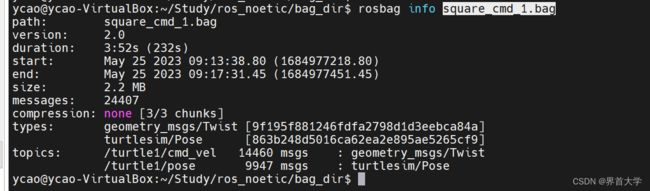
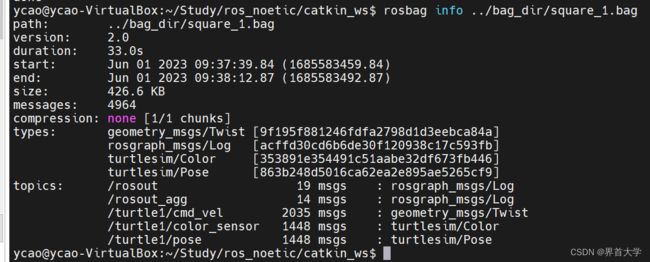
(1)查看rosbag包的基本信息,可以看到包长,消息个数,类型,topic名,msg名
rosbag info square_cmd_1.bag
(2)读取rosbag包指定 topic 的所有 msg 内容
rostopic echo -b square_cmd_1.bag /turtle1/cmd_vel
rostopic echo -b square_cmd_1.bag /turtle1/pose


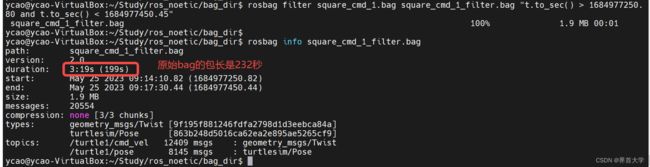
(3)按照时间片,截断rosbag包,生成一个新的短包
rosbag filter square_cmd_1.bag square_cmd_1_filter.bag "t.to_sec() > 1684977250.80 and t.to_sec() < 1684977450.45"
2.1.3 回放rosbag
(1)首先关闭前面的dram_square程序,然后在录制bag的窗口,执行:
rosbag play square_cmd_1_filter.bag
// 如果想倍速播放,可以使用 -r;
rosbag play -r 2 square_cmd_1_filter.bag
// 如果想偏移起点播放,可以使用 -s;
rosbag play -s 100 square_cmd_1_filter.bag
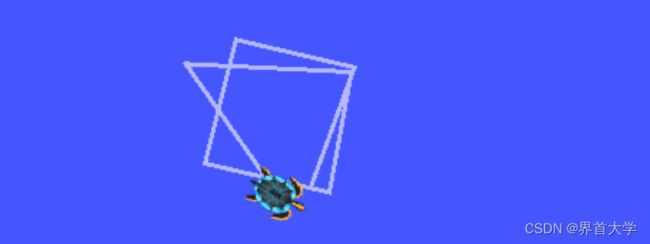

(2)仔细观察可以发现,回放的小乌龟轨迹与draw_square执行的结果是不一样的,ros Tutorials的第17节 录制和回放数据 里有一段解释:

2.2 C++实现rosbag命令行工具
2.2.1 C++录包样例
(1)创建 rosbag_test 软件包和文件,这个软件包将实现bag录制,读取,截断和回放四个功能,这里先讲解bag录制
cd ~/catkin_ws/src/cpp
// topic_tools 是用来写rosbag play程序用的
catkin_create_pkg rosbag_test rosbag turtlesim topic_tools roscpp rospy
cd rosbag_test
mkdir launch
touch launch/start_cpp_record.launch src/bag_record.cpp
(2)编写bag_record.cpp
#include (3)编写start_cpp_record.launch
<launch>
<node
pkg="turtlesim"
type="turtlesim_node"
name="turtlesim"
required="true"
/>
<node
pkg="turtlesim"
type="draw_square"
name="draw_square"
required="true"
/>
// 等5秒再启动record,否则另外两个节点没起来,record看不到topic
<node
pkg="rosbag_test"
type="rosbag_test_record"
name="bag_record"
args="-O /home/ycao/Study/ros_noetic/bag_dir/square_1.bag -a"
output="screen"
launch-prefix="bash -c 'sleep 5; $0 $@'"
/>
launch>
(4)编译和运行(由于四个样例都在 rosbag_test 包里,因此最后一个样例再把CmakeLists放上来)
cd ~/catkin_ws/
catkin_make --source src/cpp/rosbag_test/
source devel/setup.bash
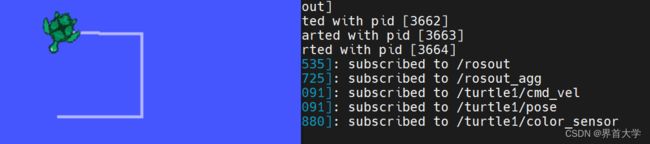
roslaunch rosbag_test start_cpp_record.launch
2.2.2 C++查看包样例
(1)创建并编写bag_echo.cpp
cd ~/catkin_ws/src/cpp/rosbag_test
touch src/bag_echo.cpp
bag_echo.cpp
#include (3)编译和运行
cd ~/catkin_ws/
catkin_make --source src/cpp/rosbag_test/
source devel/setup.bash
./devel/lib/rosbag_test/rosbag_test_echo -b ../bag_dir/square_1.bag -t /rosout

2.2.3 C++截取包样例
(1)创建并编写bag_filter.cpp
cd ~/catkin_ws/src/cpp/rosbag_test
touch src/bag_filter.cpp
bag_filter.cpp
#include (3)编译和运行
cd ~/catkin_ws/
catkin_make --source src/cpp/rosbag_test/
source devel/setup.bash
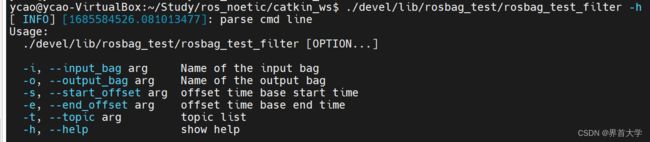
// 查看使用帮助
./devel/lib/rosbag_test/rosbag_test_filter -h
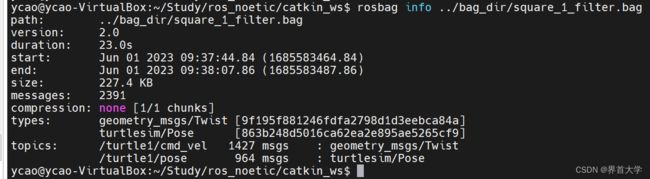
./devel/lib/rosbag_test/rosbag_test_filter -i ../bag_dir/square_1.bag -o ../bag_dir/square_1_filter.bag -s 5 -e 5 -t /turtle1/cmd_vel -t /turtle1/pose
2.2.4 C++包播放样例
(1)创建并编写bag_play.cpp
cd ~/catkin_ws/src/cpp/rosbag_test
touch src/bag_play.cpp
bag_play.cpp
#include (3)创建并编写start_cpp_play.launch
cd ~/catkin_ws/src/cpp/rosbag_test
touch launch/start_cpp_play.launch
start_cpp_play.launch
<launch>
<node
pkg="turtlesim"
type="turtlesim_node"
name="turtlesim"
required="true"
/>
<node
pkg="rosbag_test"
type="rosbag_test_play"
name="bag_play"
args="-b /home/ycao/Study/ros_noetic/bag_dir/square_1.bag -t /turtle1/cmd_vel"
output="screen"
/>
launch>
(4)编写最终版CMakeLists.txt,这四个样例都是用的这个CMakeLists
cmake_minimum_required(VERSION 3.0.2)
project(rosbag_test)
find_package(catkin REQUIRED COMPONENTS
topic_tools
rosbag
roscpp
rospy
turtlesim
)
catkin_package()
include_directories(
include/rosbag_test
${catkin_INCLUDE_DIRS}
thirdparty/ros_msg_parser/include
)
add_executable(${PROJECT_NAME}_record src/bag_record.cpp)
add_executable(${PROJECT_NAME}_echo src/bag_echo.cpp)
add_executable(${PROJECT_NAME}_filter src/bag_filter.cpp)
add_executable(${PROJECT_NAME}_play src/bag_play.cpp)
target_link_libraries(${PROJECT_NAME}_record
${catkin_LIBRARIES}
)
target_link_libraries(${PROJECT_NAME}_echo
ros_msg_parser
${catkin_LIBRARIES}
)
target_link_libraries(${PROJECT_NAME}_filter
${catkin_LIBRARIES}
)
target_link_libraries(${PROJECT_NAME}_play
${catkin_LIBRARIES}
)
(5)编译并运行
cd ~/catkin_ws/
catkin_make --source src/cpp/rosbag_test/
source devel/setup.bash
roslaunch rosbag_test start_cpp_play.launch


3 总结
本章的四个cpp样例是非常通用的,完全可以作为命令行工具的平替。下一章,我们将使用python重新实现这四个样例。本文中的例子放在了本人的github上: ros_src