viple与物理机器人(一):线控模拟
为了检测viple程序与物理机器人是否能顺利连接上
如果能顺利连接上,那么,可以通过内建事件从而控制物理机器人的前进、后退、左转、右转以及暂停。
如果不能连接上,首先,程序无法控制物理机器人,其次,当viple程序中编写沿右墙迷宫算法(或者其他算法),由于viple程序和物理机器人不能连接上,无论算法多么高级,都使用不上,当然,也就看不到任何运行效果了。
所以,首先测试viple与物理机器人是否能连接上,这一步骤非常重要。
第1步:取出智能小车,为小车装上电池(或者插上电源)。
找到船型开关
按船型开关,打开系统,此时小车系统运行,发出WiFi信号。

选中小车发出的WiFi信号,输入密码:12345678,进行连接。

此时,显示的是无法连接到这个网络,那是否连接上了,还需要编写viple程序来进行测试。
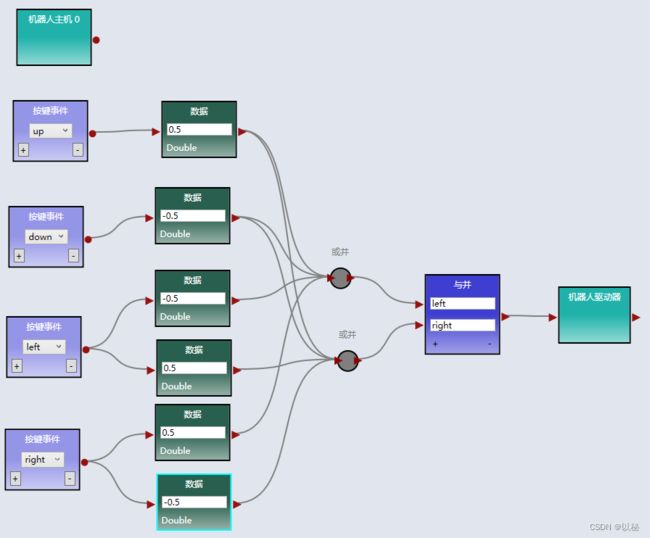
第2步:编写viple程序,使用↑↓←→方向键实现控制小车前进、后退、左转、右转的控制。
打开viple软件(如果此时打不开,可以先断开小车的wifi,连接到其他的网络,从而打开viple。因为viple软件的启动是需要联网的,如果不想联网使用,可以选用4.0.0.1版本)
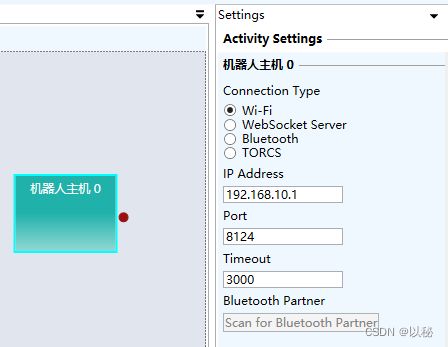
拖入主机并配置,注意:viple编写的程序,想要运行在物理机器人上,不再是模拟器,所以,需要按照物理机器人的说明书(常用的配置是:小车的主机IP地址:192.168.10.1、端口号:8124,驱动器左轮和右轮的端口号分别是0和1,前方、右方、左方的超声波传感器对应的端口号分别是10,12,11,其他配置需要看说明书)来进行配置,不可随意更改ip地址和端口号等,由于小车发出了wifi信号,连接类型选用Wi-Fi即可
编写程序逻辑
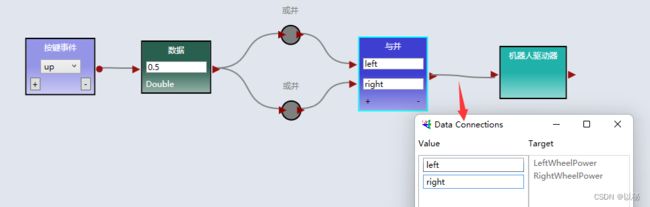
首先是前进,机器人驱动器配置了两个电机,可用于行走,所以当按下↑时,两个电机的驱动功率值应该分别设置为0.5(只要是0~1之间的数均可,正数表示前进,负数表示后退,左右轮的驱动功率值相等,且都为正数,此时,物理机器人可以向前直行,如果不相等,无法走直线)
根据想法,首先需要拖入一个机器人驱动器,并配置信息(也是需要根据说明书来配置,不可随意设置)

添加上按键事件,将左轮和右轮的驱动功率值设置为0.5,实现前进。
接下来运行程序,检测小车是否前进。
首先,电脑连接上小车的WiFi信号,再运行viple程序,然后按↑,观察小车是否前进。

此时,viple程序和物理机器人连接成功,按键盘上的方向键↑,观察到小车在直行。
点击查看运行效果
小车与程序连接成功,于是,按照同样的思路,将后退、左转、右转做完整(如果您想要暂停,还可以添加一个暂停按键,实现停止)。
点击查看运行效果
可能出现的问题(无论哪种情况发生,都要先解决了再做后面的复杂程序):
1、打开船型开关后,在电脑上无法找到小车的wifi信号
解决方案:1)关闭小车电源,重新启动;2)观察电压,若电压太低,可以充一会电后再打开;3)刷新电脑的WiFi信号,使得电脑能快速搜索到对应的wifi信号;4)关闭电脑的wifi,再重新打开;5)将小车的系统进行重装(不到万不得已,不要做这一步,因为您将先研究操作系统是如何安装的)。
2、连接上wifi后,启动viple程序失败

解决方案:
手动设置本机IP地址,将本机IP设置为与机器人IP在同一个网段即可
由于机器人的IP地址是192.168.10.1,所以,本机地址可以设置为192.168.10.小车编号(例如:小车编号为012,那么,本机地址可以设置为192.168.10.12),当然,还需配置子网掩码和默认网关,然后点击保存即可。(本处需要有一定的计算机网络知识)
核心:IP地址、子网掩码和默认网关,然后点击“保存”。