Crocoddyl: 多接触最优控制的高效多功能框架
系列文章目录
前言

我们介绍了 Crocoddyl(Contact RObot COntrol by Differential DYnamic Library),这是一个专为高效多触点优化控制(multi-contact optimal control)而定制的开源框架。Crocoddyl 可高效计算给定预定义接触序列(predefined sequence of contacts)的状态轨迹(state trajectory)和控制策略(control policy)。其效率得益于稀疏分析导数(sparse analytical derivatives)的使用、对问题结构的利用以及数据共享。它利用微分几何(differential geometry)来正确描述任何几何系统(如浮动基座系统(floating-base systems))的状态。
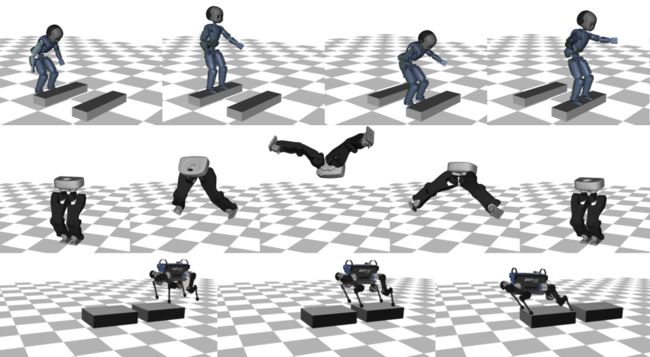
此外,我们还提出了一种名为易损微分动态编程(Feasibility-prone Differential Dynamic Programming,FDDP)的新型多重打靶法(multiple-shooting method)。然而,我们的方法并没有增加额外的决策变量(decision variables),而额外的决策变量往往会因因式分解而增加每次迭代的计算时间。与经典的差分动态编程(DDP)算法相比,我们的新方法具有更强的全局化策略。具体来说,我们对经典 DDP 算法提出了两点修改。首先,后向传递接受不可行的状态控制轨迹。其次,在早期的 "探索性 "迭代中,滚动保持间隙开放(这是仅有相等约束的多重射击方法所期望的)。我们用不同的任务展示了我们框架的性能。利用我们的方法,我们可以在几毫秒的时间内计算出腿式机器人的高动态机动性(highly-dynamic maneuvers)(如跳跃(jumping)、前空翻(front-flip))。
Crocoddyl 是一个用于接触序列下机器人控制的最优控制库。它的求解器基于新颖高效的微分动态编程(DDP)算法。Crocoddyl 可计算最佳轨迹和反馈增益。它使用 Pinocchio 快速计算机器人动力学和分析导数。
如果您想了解有关 Crocoddyl 及其求解器的更多信息,我们建议您阅读 [1] [2] [3] 并访问 PUBLICATIONS.md。如果您想了解当前的发展情况并做出贡献,请直接访问开发分支。
一、特点
Crocoddyl 功能多样:
- 各种最优控制求解器(DDP、FDDP、BoxFDDP、Ipopt 等)
- 通过 Pinocchio 实现分析和稀疏导数
- 利用 Pinocchio 支持微分几何
- 各种积分器、动力学、成本和约束条件
- 数值微分支持
- 通过 CppAD 支持自动微分
Crocoddyl 高效灵活:
- 高速缓存友好
- 通过 OpenMP 支持多线程
- 通过 Boost Python 绑定 Python(包括抽象
- 兼容 C++14/17/20
- 经过广泛测试
- 通过 CppADCodeGen 支持自动代码生成

二、安装
Crocoddyl 可以轻松安装在各种 Linux(Ubuntu、Fedora 等)和 Unix 发行版(Mac OS X、BSD 等)上。以下是安装 Crocoddyl 的不同方法。
2.1 Conda
conda install crocoddyl -c conda-forge2.2 pypi
pip install --user crocoddyl2.3 ROS
只需将其克隆(使用 --recursive 命令)到 catkin 工作区并编译即可。
2.3.1 从 Debian / Ubuntu 软件包中使用 robotpkg
如果您从未添加过 robotpkg 的软件仓库,现在就添加吧:
sudo tee /etc/apt/sources.list.d/robotpkg.list <安装 Crocoddyl 及其 Python 绑定:
sudo apt install robotpkg-py3\*-crocoddyl配置环境变量
export PATH=/opt/openrobots/bin:$PATH
export PKG_CONFIG_PATH=/opt/openrobots/lib/pkgconfig:$PKG_CONFIG_PATH
export LD_LIBRARY_PATH=/opt/openrobots/lib:$LD_LIBRARY_PATH
export PYTHONPATH=/opt/openrobots/lib/python3.10/site-packages:$PYTHONPATH三、文档
这里有 Crocoddyl 的 Doxygen 文档。或者,你也可以查看 Jupyter 笔记本。按以下顺序开始
examples/notebooks/unicycle_towards_origin.ipynb
examples/notebooks/cartpole_swing_up.ipynb
examples/notebooks/arm_manipulation.ipynb
examples/notebooks/whole_body_manipulation.ipynb
示例/笔记本/双足行走.ipynb
examples/notebooks/introduction_too_crocoddyl.ipynb
此外,安装完成后,您可以按如下方式运行示例:
python -m crocoddyl.examples.quadrupedal_gaits "display" "plot" # enable display and plot或运行构建目录中的示例、单元测试和基准测试,如
cd build
make test
make -s examples-quadrupedal_gaits INPUT="display plot" # enable display and plot
make -s benchmarks-cpp-quadrupedal_gaits INPUT="100 walk" # number of trials ; type of gait在这里可以使用环境变量来显示和/或绘制由我们的示例生成的图表:
export CROCODDYL_DISPLAY=1
export CROCODDYL_PLOT=1四、引用 Crocoddyl
在学术研究中引用 Crocoddyl 时,请使用以下 BibTeX 行:
@inproceedings{mastalli20crocoddyl,
author={Mastalli, Carlos and Budhiraja, Rohan and Merkt, Wolfgang and Saurel, Guilhem and Hammoud, Bilal
and Naveau, Maximilien and Carpentier, Justin and Righetti, Ludovic and Vijayakumar, Sethu and Mansard, Nicolas},
title={{Crocoddyl: An Efficient and Versatile Framework for Multi-Contact Optimal Control}},
booktitle = {IEEE International Conference on Robotics and Automation (ICRA)},
year={2020}
}
请考虑引用 PUBLICATIONS.md 中描述的我们的部分出版物和贡献。
Crocoddyl 的贡献不仅限于高效的软件开发。也请考虑引用我们不同求解器和公式的算法贡献:
- 可行性驱动 DDP (FDDP): [1]
- 控制受限的可行性驱动 DDP(Box-FDDP): [2]
- 反动力学轨迹优化和相等约束 DDP 求解器(Intro 求解器): [3]
最后,还请考虑引用 Pinocchio,它为刚体算法及其导数的高效实施做出了贡献。有关如何引用 Pinocchio 的更多详情,请访问:https://github.com/stack-of-tasks/pinocchio。
五、部分出版物
[1] C. Mastalli, R. Budhiraja, W. Merkt, G. Saurel, B. Hammoud, M. Naveau, J. Carpentier, L. Righetti, S. Vijayakumar and N. Mansard. Crocoddyl: An Efficient and Versatile Framework for Multi-Contact Optimal Control, IEEE International Conference on Robotics and Automation (ICRA), 2020
[2] C. Mastalli, W. Merkt, J. Marti-Saumell, H. Ferrolho, J. Sola, N. Mansard and S. Vijayakumar. A Feasibility-Driven Approach to Control-Limited DDP, Autonomous Robots, 2022
[3] C. Mastalli, S. P. Chhatoi, T. Corbères, S. Tonneau and S. Vijayakumar. Inverse-Dynamics MPC via Nullspace Resolution, IEEE Transactions on Robotics, 2023