- ROS学习笔记5:常用API和模块导入
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满15篇(5/15)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:初始化,话题服务
- UR Studio仿真工具上线助力协作机器人快速部署与精准配置模拟
欣佰特cnbestec
机器人优傲优傲机器人URStudioPolyScopeXAI协作机器人
URStudio仿真工具是专为协作机器人自动化部署打造的一款集成化、在线式仿真平台。它基于PolyScopeXAI平台开发,提供从方案设计到仿真验证的一体化流程,帮助企业提升自动化项目的设计效率与实施成功率。工程师无需复杂操作即可快速上手,轻松应对多变的生产需求。无论是初学者还是资深用户,都能通过直观的界面完成仿真任务,实现智能制造的高效转型。URStudio仿真工具核心优势平台集成,提升协作效率
- Delta视觉定位系统
东城十三
vuca数码相机计算机视觉目标跟踪算法人工智能机器学习
Delta视觉定位系统软件应用背景Delta机器人以并联构型实现“轻量、高速、高精度”三位一体,成为高速分拣、精密装配、食品包装等领域的佼佼者。然而,其卓越的物理性能要转化为实际作业中的高精度定位取放能力,视觉定位系统是不可或缺的“眼睛”和“导航员”。尤其在面对高速运动目标或随机摆放(无序)物体的复杂场景时,视觉系统是实现高效、精准作业的核心技术保障。通过机器视觉实时识别目标物体的位置与姿态,引导
- 3天狂揽2.8k星!manus 开源替代又又又又又又又来啦! 逆天AI助理Suna开源!免费替你搞定一切,效率飙升!
梦玄海
人工智能开源编辑器stablediffusiongolang
今天给大家挖来一个超级宝藏!你是不是也曾幻想过拥有一个钢铁侠的贾维斯那样,能帮你处理各种繁琐任务的AI伙伴?能在你忙得焦头烂额时,优雅地帮你完成研究、分析数据、甚至处理各种日常挑战?别再幻想了!今天的主角——Suna,就是这样一个为你而生的开源通用AI智能体!它不仅仅是一个聊天机器人,更是一个能代表你行动、解决现实世界问题的得力干(工)助(具)手(人)!在GitHub上,光发布几天的Suna项目已
- 基于机器学习的人形机器人电池健康状态预测方法
AI天才研究院
计算AI大模型企业级应用开发实战AI人工智能与大数据机器学习机器人人工智能ai
基于机器学习的人形机器人电池健康状态预测方法:从理论到实践的系统解析关键词电池健康状态(SOH)、剩余使用寿命(RUL)、人形机器人、机器学习、时序数据建模、多模态特征融合、边缘计算部署摘要本报告系统解析基于机器学习的人形机器人电池健康状态预测方法,覆盖从理论框架到工程实现的全链路。首先界定人形机器人场景下电池健康状态的核心指标(SOH/RUL/RC),梳理从电化学模型到数据驱动方法的技术演进;其
- n8n和dify有什么区别
小雷FansUnion
AI2025人工智能
n8nvsDify全面对比分析1.产品定位对比1.1核心定位差异维度n8nDify产品类型工作流自动化平台AI应用开发平台主要用途连接不同服务,实现业务自动化快速构建AI聊天机器人和应用目标用户业务人员、运营人员、开发者AI应用开发者、产品经理核心价值提升工作效率,减少重复劳动降低AI应用开发门槛1.2应用场景对比n8n应用场景:├──数据同步自动化│├──CRM与邮件系统同步│├──表格数据自动
- 基于python快速部署属于你自己的页面智能助手
小张Tt
python人工智能腾讯云AI代码助手
文章目录前言一、实现目标二、代码解析2.1目录结构2.2后端:Flask服务器的搭建2.2.1安装Flask2.2.2创建Flask应用2.3实现聊天界面与消息交互2.3.1创建聊天界面三、跨域问题的解决3.1安装flask-cors3.2在Flask中启用CORS五效果展示前言 AI聊天机器人已经成为了许多应用场景中的重要组成部分。通过与用户的对话,聊天机器人不仅能够提升用户体验,还能通过不断
- Veo 3 可以生成视频,并附带配乐
TechVision大咖圈
音视频人工智能
谷歌最新的视频生成AI模型Veo3可以创建与其生成的剪辑相配的音频。周二,在谷歌I/O2025开发者大会上,谷歌发布了Veo3。该公司声称,这款产品可以生成音效、背景噪音,甚至对话,为其制作的视频增添配乐。谷歌表示,Veo3在生成的视频质量方面也比上一代Veo2有所提升。Veo3从周二开始在谷歌的Gemini聊天机器人应用程序中推出,供谷歌每月249.99美元的AIUltra计划订阅者使用,可以通
- AI正在偷偷取代这10种职业,你的工作安全吗?
近年来,人工智能(AI)的飞速发展正在悄然改变我们的工作方式。从自动化客服到AI生成内容,许多传统职业正面临被取代的风险。虽然AI带来了更高的效率和便利,但也让不少人开始担忧:我的工作会被AI抢走吗?今天,我们就来盘点10种最容易被AI取代的职业,并探讨如何在这个AI时代保持竞争力。1.客服代表取代指数:★★★★★AI驱动的聊天机器人(如ChatGPT、GoogleBard)已经能够处理大部分基础
- 【机器学习&深度学习】反向传播机制
目录一、一句话定义二、类比理解三、为什重要?四、用生活例子解释:神经网络=烹饪机器人4.1第一步:尝一口(前向传播)4.2第二步:倒着推原因(反向传播)五、换成人工智能流程说一遍六、图示类比:找山顶(最优参数)七、总结一句人话八、PyTorch代码示例:亲眼看到每一层的梯度九、梯度=损失函数对参数的偏导数十、类比总结反向传播(Backpropagation)是神经网络中训练过程的核心机制,它就像“
- 鞋履智造的“隐形工匠”:PROFIBUS DP转ETHERNET/IP网关应用实践
在鞋履制造产线中,西门子PLC凭借PROFIBUSDP协议实现精准逻辑控制,而涂胶机器人多采用ETHERNET/IP协议执行鞋面粘合与处理任务。为实现设备高效协同,JH-PB-EIP疆鸿智能PROFIBUSDP转ETHERNET/IP网关化身“通信中枢”,破解协议壁垒,成为提升鞋子舒适度与耐用性的核心助力。硬件连接时,需先在西门子PLC中完成DP从站组态,设定地址并通过专用电缆接入网关DP端口,针
- 别再为通信发愁!机床厂PROFIBUS DP转EtherNet/IP网关应用指南,低成本实现智能升级
JIANGHONGZN
PROFIBUSDP工业通讯协议网关ETHERNET/IP
在现代机床制造工厂中,设备间的无缝通信是实现高效、柔性生产的关键。西门子PLC(如S7-300/1500系列)作为核心控制器广泛采用PROFIBUSDP现场总线,而高端机器人系统(如FANUC、KUKA)则普遍支持EtherNet/IP协议。在这类异构网络共存的环境中,协议转换网关成为打通数据壁垒的核心枢纽。网关的核心作用与工作流程角色定位:网关作为“翻译官”,部署在西门子PLC(PROFIBUS
- PROFIBUS DP转EtherNet/IP网关:精密医疗器械粘合密封的质量守护者
JIANGHONGZN
PROFIBUSETHERNET/IPDP协议网关工业通讯机器人
在医疗器械制造领域,精密部件(如输液器接头、植入体密封壳)的粘合与密封工艺对可靠性和一致性要求近乎苛刻。这类工艺通常由高速、高精度的涂胶机器人执行,而其精准动作离不开与核心控制系统(如西门子PLC)的无缝数据交互。当产线中同时存在西门子PROFIBUSDP网络与支持EtherNet/IP的机器人时,专用协议转换网关便成为确保“数据血液”畅通的关键设备。网关的核心角色:协议翻译与无缝桥接此类网关设备
- 十四、buildroot 系统package新增应用 编写规则
暮云星影
瑞芯微linux
4.7.2、编写规则1、规范概述Buildroot像一个「自动化厨房」,每个包是一道菜。如果菜名(包名)、食材位置(路径)、做法(脚本)不统一,厨房会报错。规范是让机器人(Buildroot脚本)能读懂你的菜谱。2、命名规则包目录名(package/下的文件夹)小写字母+短横线,如package/my-app配置项名(Config.in里的变量)BR2_PACKAGE_+包目录名大写+下划线分隔,
- OpenCV实现相机标定的棋盘格制作与应用
BIG-HO
本文还有配套的精品资源,点击获取简介:在计算机视觉领域,棋盘格标定板用于获取相机参数,实现图像校正和三维重建。OpenCV库提供了绘制棋盘格和相机标定的功能。本文将详细介绍如何使用OpenCV制作棋盘格标定板,包括设计、绘制、保存、相机标定过程和应用。通过实际案例,如畸变矫正、三维重建、AR应用和机器人导航,展示棋盘格标定板在视觉技术中的关键作用。1.棋盘格设计与绘制1.1棋盘格的基本概念与应用棋
- ROS2 强化学习:案例与代码实战
芯动大师
ROS2学习目标检测人工智能
一、引言在机器人技术不断发展的今天,强化学习(RL)作为一种强大的机器学习范式,为机器人的智能决策和自主控制提供了新的途径。ROS2(RobotOperatingSystem2)作为新一代机器人操作系统,具有更好的实时性、分布式性能和安全性,为强化学习在机器人领域的应用提供了更坚实的基础。本文将通过一个具体案例,深入探讨ROS2与强化学习的结合应用,并提供相关代码实现。二、案例背景本案例以移动机器
- Epson RC+软件二次开发:EpsonRC+软件通信协议详解
kkchenjj
工业软件二次开发全集机器人工业软件机器人开发工业软件开发工业软件二次开发
EpsonRC+软件二次开发:EpsonRC+软件通信协议详解EpsonRC+软件二次开发:通信协议详解1.1.EpsonRC+软件概述EpsonRC+软件是Epson机器人系统的核心控制软件,它提供了丰富的功能和界面,用于编程、控制和监控Epson机器人。RC+软件支持多种编程语言,包括Epson的专用语言和标准的C/C++语言,这为二次开发提供了坚实的基础。1.11.1EpsonRC+软件功能
- EtherCAT工业实时以太网深度解析:从高速控制到智能互联的技术革命
AI_DL_CODE
EtherCAT工业实时以太网运动控制分布式时钟TSN工业互联网机器人控制
摘要:本文系统阐述EtherCAT(以太网控制自动化技术)在工业自动化中的战略地位与技术实现,揭示其作为高速实时通信协议的核心优势。通过微秒级响应、纳秒级同步及灵活拓扑等特性,EtherCAT在机器人、高端装备等场景中占据主导地位。文中结合多轴运动控制、跨协议集成等典型应用,提供从分布式时钟配置到故障诊断的完整代码示例,并解析TSN融合、AI驱动等未来演进方向。实测数据表明,EtherCAT可使控
- PowerLink工业实时以太网深度解析:开源生态下的硬实时通信技术革命
摘要:本文系统阐述PowerLink(EthernetPOWERLINK)在工业自动化中的战略定位与技术实现,揭示其作为开源实时以太网协议的核心优势。通过微秒级响应、灵活拓扑及开源生态等特性,PowerLink在运动控制、过程控制等领域占据独特地位。文中结合高速灌装、多轴机器人等典型场景,提供从网络配置到安全逻辑的完整代码示例,并解析TSN融合、AI驱动等未来演进方向。实测数据表明,PowerLi
- 2025最新滑块验证码、图形验证码、解决滑块验证码识别的技术方法大全
猫头虎
前端技术专区深度学习javascript正则表达式typescript滑块验证码行为验证人机识别前端集成
2025最新滑块验证码、图形验证码、解决滑块验证码识别的技术方法大全概述滑块验证码(SliderCaptcha)自上线以来,以其交互性强、用户体验较好而被广泛应用于各类网站和APP的登录、注册、支付等关键环节。相比传统文字验证码或图形混淆验证码,滑块验证码能够更有效地区分真人与机器人,降低恶意脚本的通过率。然而,随着技术的发展,滑块验证码也不断被识别与破解。本文将从「生成与验证组件」和「识别与破解
- 增强版 Kimi:AI 驱动的智能创作平台,实现一站式内容生成(图片、PPT、PDF)!
每天译点晓知识
AI人工智能专栏人工智能PPTPDF一键生成AI图片生成
前言基于扣子Coze零代码平台,我们从零到一轻松实现了专属Bot机器人的搭建。AI大模型(LLM)、智能体(Agent)、知识库、向量数据库、知识图谱,RAG,AGI的不同形态愈发显现,如何将其动态组合,凸显其强大爆发力!!!接下来,我们介绍通过Kimi进行功能增强?使得我们的Bot具备一键生成图片、PPT编写、PDF制作......模型配置Kimi月之暗面旗下国产大模型,以独特的长文本处理能力,
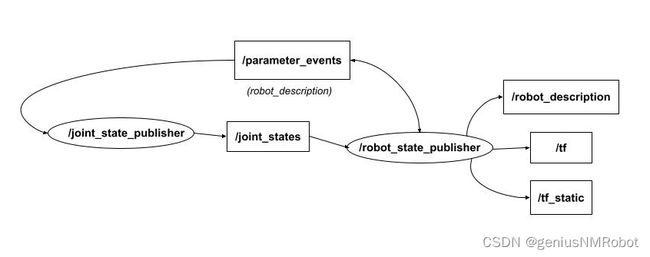
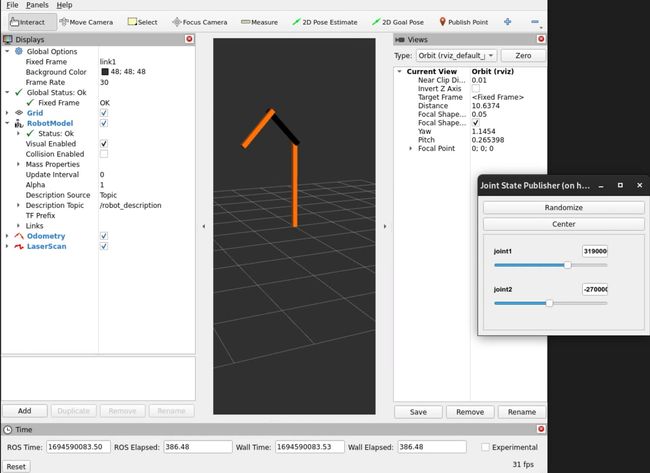
- ROS系列(三):从零构建机器人通信系统 --- 包创建+发布订阅+Launch实战 & RViz/rqt可视化利器拆解!
引言机器人操作系统(ROS)的核心在于其模块化通信架构与高效的开发流程。本指南直击ROS开发的核心技术环节,助你快速构建功能节点并实现系统集成。你将从理解工作空间(catkin_ws)这一代码与编译的容器开始,掌握使用catkin_create_pkg创建功能包(Package)的方法,并深入关键配置文件CMakeLists.txt与package.xml的作用。核心在于编写节点(Node):通过
- 轻巧灵动,智启未来 ——Kinova Gen3 Lite 机器人轻松解锁各行业自动化新姿势
BFT白芙堂
机器人自动化Kinova机器人人工智能行业应用机器人解决方案KinovaGen3Lite
近年来,KinovaGen3Lite机器人凭借其卓越的性能、灵活的应用能力以及出色的性价比,在全球范围内掀起了一股热销狂潮。无论是科研机构、高校实验室,还是工业制造企业,都对它青睐有加。其销量持续攀升,市场占有率不断扩大,成为了众多用户在机器人应用领域的首选产品。这款机器人不仅满足了不同行业对于机器人多样化功能的需求,更以其创新的设计和先进的技术,为用户带来了前所未有的使用体验。五大核心优势,定义
- Python发送天气预报到企业微信解决方案
会飞的土拨鼠呀
Python学习python企业微信开发语言
Python发送天气预报到企业微信解决方案下面是一个完整的Python解决方案,可以将今日天气信息和未来天气趋势图发送到企业微信。这个方案使用免费天气API获取数据,生成可视化图表,然后通过企业微信机器人发送消息。importrequestsimportjsonimportmatplotlib.pyplotaspltimportmatplotlib.datesasmdatesimportdatet
- 借力 提示词检索解码与 OpenVINO™ GenAI 全面提升 LLM 推理
OpenVINO 中文社区
经验分享
大语言模型(LLM)彻底改变了自然语言处理,推动了聊天机器人、摘要和内容生成等应用的发展。然而,推理效率依然是一个关键挑战,尤其在需要低延迟响应的场景下更为突出。试想你在一家餐厅,经常点同样的菜。服务员不必每次都询问你的订单再传达给厨房,而是直接认出你常点的菜品并立即上菜,这样既缩短了等待时间,也加快了整个服务流程。同样,在文本生成中,模型常常遇到输入提示中的重复模式。与每次都从零开始生成toke
- 航空零件加工机器人系列编程:Yaskawa Motoman DX200_(1).YaskawaMotomanDX200系统概述
YaskawaMotomanDX200系统概述系统介绍YaskawaMotomanDX200是一种高性能的工业机器人控制系统,专为复杂和高精度的制造任务设计,广泛应用于航空航天行业的零件加工。该系统提供了强大的计算能力和灵活的编程界面,能够支持多种机器人型号和配置。DX200控制系统不仅能够实现精确的运动控制,还支持多种传感器和外设的集成,从而提高了机器人的智能化水平和适应性。系统架构DX200控
- 2025年6月21和22日复习和预习(python)
子豪-中国机器人
人工智能
一、作业内容(一)知识点回顾用户输入处理使用input()函数获取用户输入的字符串,并存储到变量中。条件判断语句if-elif-else结构:根据不同条件执行相应代码块,适用于多分支判断。语音合成技术导入pyttsx3库实现文本转语音功能,通过pyttsx3.speak()方法将文本转换为语音输出。(二)练习题基础功能实现编写程序,创建一个简易聊天机器人,能够根据用户输入的问题给出预设回答。实现至
- 一个实验室走出15位AI创业者,华人占1/3,集齐大模型机器人搜索,教授骄傲晒战绩
强化学习曾小健
人工智能
一个实验室走出15位AI创业者,华人占1/3,集齐大模型机器人搜索,教授骄傲晒战绩原创陈骏达智东西2025年03月14日18:08北京导师不仅传道授业解惑,还是创业搭子与投资人。作者|陈骏达编辑|心缘一个AI实验室,走出15位创业者,12家知名AI创企,这是什么水平?智东西3月14日报道,昨日,加州大学伯克利分校教授PieterAbbeel在社交媒体平台上发文,盘点了从他实验室走出的15名知名AI
- BLDC电机控制器下一个发展趋势是什么?
funny2024
大数据
【哔哥哔特导读】集成降本?优化算法?BLDC电机控制器更新迭代居然还有新花样......本栏目就邀请整机企业和半导体企业资深行业人士展开对话,一窥BLDC电机控制器的魅力所在,探讨BLDC电机技术创新、算法优化及产业链协同的奥秘。编者按:相比于传统的电机,BLDC电机具有不可比拟的优势。在智能化、工业自动化的今天,BLDC电机控制器在白电、新能源汽车、工业/人形机器人等领域有着广泛的应用前景和市场
- cnn 一维时序数据_AI顶会解读|时序动作分割与检测,附代码链接
时序动作分割与检测时序动作的分割与检测是视频计算机视觉技术的一大常规任务,对自动驾驶和机器人等应用至关重要,下面3篇论文是腾讯AILab在这一方向的探索成果。1.动作识别中的时序帧间差异表征学习TemporalDistinctRepresentationLearningforActionRecognition本文由腾讯AILab、腾讯优图实验室、新加坡南洋理工大学、美国纽约州立大学布法罗分校合作完
- ztree设置禁用节点
3213213333332132
JavaScriptztreejsonsetDisabledNodeAjax
ztree设置禁用节点的时候注意,当使用ajax后台请求数据,必须要设置为同步获取数据,否者会获取不到节点对象,导致设置禁用没有效果。
$(function(){
showTree();
setDisabledNode();
});
- JVM patch by Taobao
bookjovi
javaHotSpot
在网上无意中看到淘宝提交的hotspot patch,共四个,有意思,记录一下。
7050685:jsdbproc64.sh has a typo in the package name
7058036:FieldsAllocationStyle=2 does not work in 32-bit VM
7060619:C1 should respect inline and
- 将session存储到数据库中
dcj3sjt126com
sqlPHPsession
CREATE TABLE sessions (
id CHAR(32) NOT NULL,
data TEXT,
last_accessed TIMESTAMP NOT NULL,
PRIMARY KEY (id)
);
<?php
/**
* Created by PhpStorm.
* User: michaeldu
* Date
- Vector
171815164
vector
public Vector<CartProduct> delCart(Vector<CartProduct> cart, String id) {
for (int i = 0; i < cart.size(); i++) {
if (cart.get(i).getId().equals(id)) {
cart.remove(i);
- 各连接池配置参数比较
g21121
连接池
排版真心费劲,大家凑合看下吧,见谅~
Druid
DBCP
C3P0
Proxool
数据库用户名称 Username Username User
数据库密码 Password Password Password
驱动名
- [简单]mybatis insert语句添加动态字段
53873039oycg
mybatis
mysql数据库,id自增,配置如下:
<insert id="saveTestTb" useGeneratedKeys="true" keyProperty="id"
parameterType=&
- struts2拦截器配置
云端月影
struts2拦截器
struts2拦截器interceptor的三种配置方法
方法1. 普通配置法
<struts>
<package name="struts2" extends="struts-default">
&
- IE中页面不居中,火狐谷歌等正常
aijuans
IE中页面不居中
问题是首页在火狐、谷歌、所有IE中正常显示,列表页的页面在火狐谷歌中正常,在IE6、7、8中都不中,觉得可能那个地方设置的让IE系列都不认识,仔细查看后发现,列表页中没写HTML模板部分没有添加DTD定义,就是<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN" "http://www.w3
- String,int,Integer,char 几个类型常见转换
antonyup_2006
htmlsql.net
如何将字串 String 转换成整数 int?
int i = Integer.valueOf(my_str).intValue();
int i=Integer.parseInt(str);
如何将字串 String 转换成Integer ?
Integer integer=Integer.valueOf(str);
如何将整数 int 转换成字串 String ?
1.
- PL/SQL的游标类型
百合不是茶
显示游标(静态游标)隐式游标游标的更新和删除%rowtyperef游标(动态游标)
游标是oracle中的一个结果集,用于存放查询的结果;
PL/SQL中游标的声明;
1,声明游标
2,打开游标(默认是关闭的);
3,提取数据
4,关闭游标
注意的要点:游标必须声明在declare中,使用open打开游标,fetch取游标中的数据,close关闭游标
隐式游标:主要是对DML数据的操作隐
- JUnit4中@AfterClass @BeforeClass @after @before的区别对比
bijian1013
JUnit4单元测试
一.基础知识
JUnit4使用Java5中的注解(annotation),以下是JUnit4常用的几个annotation: @Before:初始化方法 对于每一个测试方法都要执行一次(注意与BeforeClass区别,后者是对于所有方法执行一次)@After:释放资源 对于每一个测试方法都要执行一次(注意与AfterClass区别,后者是对于所有方法执行一次
- 精通Oracle10编程SQL(12)开发包
bijian1013
oracle数据库plsql
/*
*开发包
*包用于逻辑组合相关的PL/SQL类型(例如TABLE类型和RECORD类型)、PL/SQL项(例如游标和游标变量)和PL/SQL子程序(例如过程和函数)
*/
--包用于逻辑组合相关的PL/SQL类型、项和子程序,它由包规范和包体两部分组成
--建立包规范:包规范实际是包与应用程序之间的接口,它用于定义包的公用组件,包括常量、变量、游标、过程和函数等
--在包规
- 【EhCache二】ehcache.xml配置详解
bit1129
ehcache.xml
在ehcache官网上找了多次,终于找到ehcache.xml配置元素和属性的含义说明文档了,这个文档包含在ehcache.xml的注释中!
ehcache.xml : http://ehcache.org/ehcache.xml
ehcache.xsd : http://ehcache.org/ehcache.xsd
ehcache配置文件的根元素是ehcahe
ehcac
- java.lang.ClassNotFoundException: org.springframework.web.context.ContextLoaderL
白糖_
javaeclipsespringtomcatWeb
今天学习spring+cxf的时候遇到一个问题:在web.xml中配置了spring的上下文监听器:
<listener>
<listener-class>org.springframework.web.context.ContextLoaderListener</listener-class>
</listener>
随后启动
- angular.element
boyitech
AngularJSAngularJS APIangular.element
angular.element
描述: 包裹着一部分DOM element或者是HTML字符串,把它作为一个jQuery元素来处理。(类似于jQuery的选择器啦) 如果jQuery被引入了,则angular.element就可以看作是jQuery选择器,选择的对象可以使用jQuery的函数;如果jQuery不可用,angular.e
- java-给定两个已排序序列,找出共同的元素。
bylijinnan
java
import java.util.ArrayList;
import java.util.Arrays;
import java.util.List;
public class CommonItemInTwoSortedArray {
/**
* 题目:给定两个已排序序列,找出共同的元素。
* 1.定义两个指针分别指向序列的开始。
* 如果指向的两个元素
- sftp 异常,有遇到的吗?求解
Chen.H
javajcraftauthjschjschexception
com.jcraft.jsch.JSchException: Auth cancel
at com.jcraft.jsch.Session.connect(Session.java:460)
at com.jcraft.jsch.Session.connect(Session.java:154)
at cn.vivame.util.ftp.SftpServerAccess.connec
- [生物智能与人工智能]神经元中的电化学结构代表什么?
comsci
人工智能
我这里做一个大胆的猜想,生物神经网络中的神经元中包含着一些化学和类似电路的结构,这些结构通常用来扮演类似我们在拓扑分析系统中的节点嵌入方程一样,使得我们的神经网络产生智能判断的能力,而这些嵌入到节点中的方程同时也扮演着"经验"的角色....
我们可以尝试一下...在某些神经
- 通过LAC和CID获取经纬度信息
dai_lm
laccid
方法1:
用浏览器打开http://www.minigps.net/cellsearch.html,然后输入lac和cid信息(mcc和mnc可以填0),如果数据正确就可以获得相应的经纬度
方法2:
发送HTTP请求到http://www.open-electronics.org/celltrack/cell.php?hex=0&lac=<lac>&cid=&
- JAVA的困难分析
datamachine
java
前段时间转了一篇SQL的文章(http://datamachine.iteye.com/blog/1971896),文章不复杂,但思想深刻,就顺便思考了一下java的不足,当砖头丢出来,希望引点和田玉。
-----------------------------------------------------------------------------------------
- 小学5年级英语单词背诵第二课
dcj3sjt126com
englishword
money 钱
paper 纸
speak 讲,说
tell 告诉
remember 记得,想起
knock 敲,击,打
question 问题
number 数字,号码
learn 学会,学习
street 街道
carry 搬运,携带
send 发送,邮寄,发射
must 必须
light 灯,光线,轻的
front
- linux下面没有tree命令
dcj3sjt126com
linux
centos p安装
yum -y install tree
mac os安装
brew install tree
首先来看tree的用法
tree 中文解释:tree
功能说明:以树状图列出目录的内容。
语 法:tree [-aACdDfFgilnNpqstux][-I <范本样式>][-P <范本样式
- Map迭代方式,Map迭代,Map循环
蕃薯耀
Map循环Map迭代Map迭代方式
Map迭代方式,Map迭代,Map循环
>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
蕃薯耀 2015年
- Spring Cache注解+Redis
hanqunfeng
spring
Spring3.1 Cache注解
依赖jar包:
<!-- redis -->
<dependency>
<groupId>org.springframework.data</groupId>
<artifactId>spring-data-redis</artifactId>
- Guava中针对集合的 filter和过滤功能
jackyrong
filter
在guava库中,自带了过滤器(filter)的功能,可以用来对collection 进行过滤,先看例子:
@Test
public void whenFilterWithIterables_thenFiltered() {
List<String> names = Lists.newArrayList("John"
- 学习编程那点事
lampcy
编程androidPHPhtml5
一年前的夏天,我还在纠结要不要改行,要不要去学php?能学到真本事吗?改行能成功吗?太多的问题,我终于不顾一切,下定决心,辞去了工作,来到传说中的帝都。老师给的乘车方式还算有效,很顺利的就到了学校,赶巧了,正好学校搬到了新校区。先安顿了下来,过了个轻松的周末,第一次到帝都,逛逛吧!
接下来的周一,是我噩梦的开始,学习内容对我这个零基础的人来说,除了勉强完成老师布置的作业外,我已经没有时间和精力去
- 架构师之流处理---------bytebuffer的mark,limit和flip
nannan408
ByteBuffer
1.前言。
如题,limit其实就是可以读取的字节长度的意思,flip是清空的意思,mark是标记的意思 。
2.例子.
例子代码:
String str = "helloWorld";
ByteBuffer buff = ByteBuffer.wrap(str.getBytes());
Sy
- org.apache.el.parser.ParseException: Encountered " ":" ": "" at line 1, column 1
Everyday都不同
$转义el表达式
最近在做Highcharts的过程中,在写js时,出现了以下异常:
严重: Servlet.service() for servlet jsp threw exception
org.apache.el.parser.ParseException: Encountered " ":" ": "" at line 1,
- 用Java实现发送邮件到163
tntxia
java实现
/*
在java版经常看到有人问如何用javamail发送邮件?如何接收邮件?如何访问多个文件夹等。问题零散,而历史的回复早已经淹没在问题的海洋之中。
本人之前所做过一个java项目,其中包含有WebMail功能,当初为用java实现而对javamail摸索了一段时间,总算有点收获。看到论坛中的经常有此方面的问题,因此把我的一些经验帖出来,希望对大家有些帮助。
此篇仅介绍用
- 探索实体类存在的真正意义
java小叶檀
POJO
一. 实体类简述
实体类其实就是俗称的POJO,这种类一般不实现特殊框架下的接口,在程序中仅作为数据容器用来持久化存储数据用的
POJO(Plain Old Java Objects)简单的Java对象
它的一般格式就是
public class A{
private String id;
public Str