LeNet
目录
一、LeNet介绍
1、历史背景
2、模型介绍
3、总结
二、代码实现
1、定义模型
2、模型训练
3、总结
一、LeNet介绍
1、历史背景
LeNet是一种经典的卷积神经网络(Convolutional Neural Network,简称CNN),由Yann LeCun等人在1998年提出(所以叫LeNet)。它是深度学习领域中最早的成功应用之一,被广泛用于手写数字识别任务。
LeNet的诞生可以追溯到20世纪90年代,当时Yann LeCun等人致力于解决手写字符识别的问题。在传统的机器学习方法中,需要手动提取特征来进行分类,这个过程非常繁琐。LeCun等人意识到,通过使用卷积神经网络可以自动学习特征,并且在图像处理任务中表现出色。LeNet在MNIST数据集上的表现引起了广泛的关注,并且成为了深度学习领域的重要里程碑。它证明了卷积神经网络在图像分类任务中的优越性能,推动了深度学习在计算机视觉领域的发展。
随着时间的推移,LeNet为后续的深度学习研究奠定了基础,并促进了更复杂和强大的卷积神经网络的发展。它的设计思想和网络结构对后续的网络模型,如AlexNet、VGGNet和ResNet等,产生了深远的影响。
2、模型介绍

关于Softmax回归和多个全连接层组成的多层感知机,不懂的可以看我之前写的博客:
Softmax回归-CSDN博客文章浏览阅读328次。Softmax回归虽然叫“回归”,但是回归是估计一个连续值,而分类是预测一个离散类别。https://blog.csdn.net/m0_56312629/article/details/134930348?spm=1001.2014.3001.5501多层感知机-CSDN博客文章浏览阅读334次,点赞4次,收藏2次。本文介绍感知机的相关概念以及单层感知机存在的问题,进而拓展到多层感知机。为了让感知机保持非线性,因此在多层感知机的每层都加入了激活函数,同时介绍了常见的激活函数以及多类分类问题。https://blog.csdn.net/m0_56312629/article/details/134980860?spm=1001.2014.3001.5501
3、总结
- LeNet是早期成功的神经网络
- 先使用卷积层来学习图片空间信息
- 然后通过池化层来降低图片的敏感度
- 最后使用全连接层来转换到类别空间
二、代码实现
本专栏前面几篇文章介绍了构建一个完整卷积神经网络的所需组件。之前我们将Softmax回归模型和多层感知机模型应用于Fashion-MNIST数据集中的服装图片。为了能够应用softmax回归和多层感知机,我们首先将每个大小为  的图像展平为一个784维的固定长度的一维向量,然后用全连接层对其进行处理。而现在,我们已经掌握了卷积层的处理方法,我们可以在图像中保留空间结构。同时,用卷积层代替全连接层的另一个好处是:模型更简洁、所需的参数更少。
的图像展平为一个784维的固定长度的一维向量,然后用全连接层对其进行处理。而现在,我们已经掌握了卷积层的处理方法,我们可以在图像中保留空间结构。同时,用卷积层代替全连接层的另一个好处是:模型更简洁、所需的参数更少。
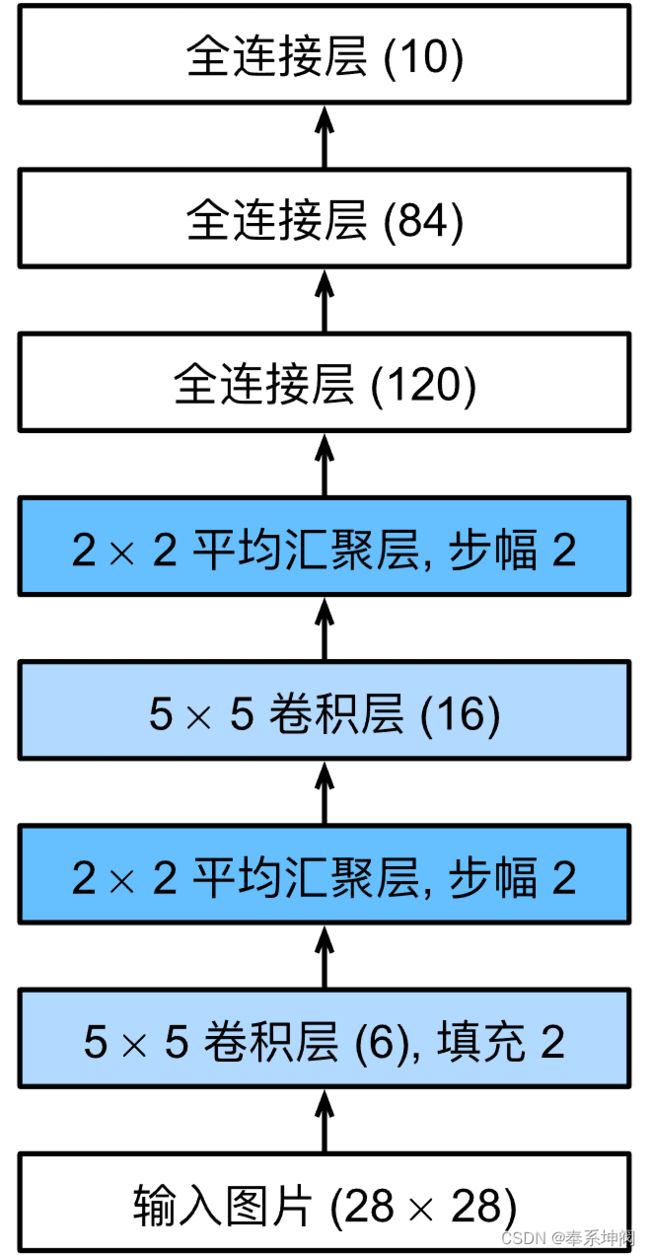
总体来看,LeNet(LeNet-5)由两个部分组成:
- 卷积编码器:由两个卷积层组成;
- 全连接层密集块:由三个全连接层组成。
为了将卷积块的输出传递给稠密块,我们必须在小批量中展平每个样本。换言之,我们将这个四维输入转换成全连接层所期望的二维输入。这里的二维表示的第一个维度索引小批量中的样本,第二个维度给出每个样本的平面向量表示。LeNet的稠密块有三个全连接层,分别有120、84和10个输出。因为我们在执行分类任务,所以输出层的10维对应于最后输出结果的数量。
1、定义模型
通过下面的LeNet代码,可以看出用深度学习框架实现此类模型非常简单。我们只需要实例化一个`Sequential`块并将需要的层连接在一起。
import torch
from torch import nn
from d2l import torch as d2l
net = nn.Sequential(
nn.Conv2d(1, 6, kernel_size=5, padding=2), nn.Sigmoid(), # 第一次卷积(1, 1, 28, 28) -> conv_kernel(6, 1, 5, 5) -> (1, 6, 28, 28)
nn.AvgPool2d(kernel_size=2, stride=2), # 第一次池化(1, 6, 28, 28) -> pool_kernel(6, 2, 2) -> (1, 6, 14, 14)
nn.Conv2d(6, 16, kernel_size=5), nn.Sigmoid(), # 第二次卷积(1, 6, 14, 14) -> conv_kernel(16, 6, 5, 5) -> (1, 16, 10, 10)
nn.AvgPool2d(kernel_size=2, stride=2), # 第二次池化(1, 16, 10, 10) -> pool_kernel(16, 2, 2) -> (1, 16, 5, 5)
nn.Flatten(), # 展平成一行(1, 16, 5, 5) -> (1, 16 * 5 * 5)
nn.Linear(16 * 5 * 5, 120), nn.Sigmoid(), # 第一个全连接层(1, 16 * 5 * 5) -> (1, 120)
nn.Linear(120, 84), nn.Sigmoid(), # 第二个全连接层(1, 120) -> (1, 84)
nn.Linear(84, 10)) # 第二个全连接层(1, 84) -> (1, 10) 我们对原始模型做了一点小改动,去掉了最后一层的高斯激活。除此之外,这个网络与最初的LeNet-5一致。下面,我们将一个大小为  的单通道(黑白)图像通过LeNet。通过在每一层打印输出的形状,我们可以检查模型,以确保其操作与我们期望的一致。
的单通道(黑白)图像通过LeNet。通过在每一层打印输出的形状,我们可以检查模型,以确保其操作与我们期望的一致。
X = torch.rand(size=(1, 1, 28, 28), dtype=torch.float32) # 输入进去的一定得是4维的,(batch_size, channels, height, width)
# X = torch.rand(size=(1, 28, 28), dtype=torch.float32) # error
for layer in net:
X = layer(X) # 这样保证一层一层的执行运算,方便看出每一层执行完后的形状
print(layer.__class__.__name__,'output shape: \t',X.shape)Conv2d output shape: torch.Size([1, 6, 28, 28])
Sigmoid output shape: torch.Size([1, 6, 28, 28])
AvgPool2d output shape: torch.Size([1, 6, 14, 14])
Conv2d output shape: torch.Size([1, 16, 10, 10])
Sigmoid output shape: torch.Size([1, 16, 10, 10])
AvgPool2d output shape: torch.Size([1, 16, 5, 5])
Flatten output shape: torch.Size([1, 400])
Linear output shape: torch.Size([1, 120])
Sigmoid output shape: torch.Size([1, 120])
Linear output shape: torch.Size([1, 84])
Sigmoid output shape: torch.Size([1, 84])
Linear output shape: torch.Size([1, 10])2、模型训练
现在我们已经实现了LeNet,让我们看看LeNet在Fashion-MNIST(这里没有用MNIST)数据集上的表现。
batch_size = 256
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size=batch_size)虽然卷积神经网络的参数较少,但与深度的多层感知机相比,它们的计算成本仍然很高,因为每个参数都参与更多的乘法。通过使用GPU,可以用它加快训练。
为了进行评估,我们定义了下面的函数,和Softmax回归有点像。由于完整的数据集位于内存中,因此在模型使用GPU计算数据集之前,我们需要将其复制到显存中。
def evaluate_accuracy_gpu(net, data_iter, device=None):
"""使用GPU计算模型在验证数据集上的精度"""
if isinstance(net, nn.Module):
net.eval() # 设置为评估模式
if not device:
device = next(iter(net.parameters())).device # 如果device没有指定的话,就把net.parameters构建成iterater,然后把第一个元素拿出来查看该元素的存在位置
# 正确预测的数量,总预测的数量
metric = d2l.Accumulator(2)
with torch.no_grad():
for X, y in data_iter:
if isinstance(X, list):
# BERT微调所需的(之后将介绍)
X = [x.to(device) for x in X]
else:
X = X.to(device) # 将X加载进device
y = y.to(device) # 将y加载进device
metric.add(d2l.accuracy(net(X), y), y.numel()) # d2l.accuracy(net(X), y)计算正确的个数 y.numel()计算y的个数
return metric[0] / metric[1] # 计算正确率为了使用GPU,我们还需要一点小改动。与Softmax回归中定义的`train_epoch_ch3`不同,在进行正向和反向传播之前,我们需要将每一小批量数据移动到我们指定的设备(例如GPU)上。
如下所示,训练函数`train_ch6`也类似于Softmax回归中定义的`train_ch3`。由于我们将实现多层神经网络,因此我们将主要使用高级API。我们使用Xavier随机初始化模型参数。与全连接层一样,我们使用交叉熵损失函数和小批量随机梯度下降。
def train_ch6(net, train_iter, test_iter, num_epochs, lr, device):
"""用GPU训练模型"""
def init_weights(m):
if type(m) == nn.Linear or type(m) == nn.Conv2d:
nn.init.xavier_uniform_(m.weight) # xavier初始化参数,防止梯度爆炸或消失
net.apply(init_weights)
print('training on', device) # 打印训练的设备
net.to(device) # 将模型移动到gpu上
optimizer = torch.optim.SGD(net.parameters(), lr=lr) # 优化器使用随机梯度下降法
loss = nn.CrossEntropyLoss() # 使用交叉熵损失
animator = d2l.Animator(xlabel='epoch', xlim=[1, num_epochs],
legend=['train loss', 'train acc', 'test acc'])
timer, num_batches = d2l.Timer(), len(train_iter)
for epoch in range(num_epochs):
# 训练损失之和,训练准确数之和,样本数
metric = d2l.Accumulator(3) # 计数器
net.train() # 将模型设为train训练模式
for i, (X, y) in enumerate(train_iter):
timer.start()
optimizer.zero_grad() # 梯度设0
X, y = X.to(device), y.to(device) # 将数据移动到gpu
y_hat = net(X)
l = loss(y_hat, y) # 计算loss
l.backward() # 反向传播计算梯度
optimizer.step() # 根据梯度优化模型参数
with torch.no_grad():
metric.add(l * X.shape[0], d2l.accuracy(y_hat, y), X.shape[0])
timer.stop()
train_l = metric[0] / metric[2] # 计算训练集平均损失
train_acc = metric[1] / metric[2] # 计算训练集正确率
if (i + 1) % (num_batches // 5) == 0 or i == num_batches - 1:
animator.add(epoch + (i + 1) / num_batches,
(train_l, train_acc, None))
test_acc = evaluate_accuracy_gpu(net, test_iter) # 计算验证集正确率
animator.add(epoch + 1, (None, None, test_acc))
print(f'loss {train_l:.3f}, train acc {train_acc:.3f}, '
f'test acc {test_acc:.3f}')
print(f'{metric[2] * num_epochs / timer.sum():.1f} examples/sec '
f'on {str(device)}')现在,我们训练和评估LeNet-5模型。
lr, num_epochs = 0.9, 10
train_ch6(net, train_iter, test_iter, num_epochs, lr, d2l.try_gpu())loss 0.469, train acc 0.823, test acc 0.779
55296.6 examples/sec on cuda:0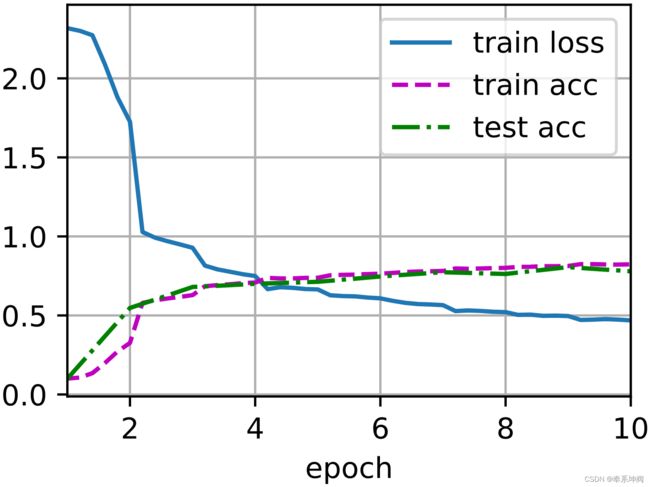
可以将卷积神经网络LeNet的结果与多层感知机进行对比,可以看到LeNet卷积神经网络过拟合性要比多层感知机要小,因为卷积层等价于一个受限的全连接层,因此卷积层模型参数要少很多,意味着模型复杂度更低一些,所以overfitting概率变低。
3、总结
- 卷积神经网络(CNN)是一类使用卷积层的网络。
- 在卷积神经网络中,我们组合使用卷积层、非线性激活函数和池化层。
- 为了构造高性能的卷积神经网络,我们通常对卷积层进行排列,逐渐降低其表示的空间分辨率,同时增加通道数。
- 在传统的卷积神经网络中,卷积块编码得到的表征在输出之前需由一个或多个全连接层进行处理。
- LeNet是最早发布的卷积神经网络之一。