ESP32学习笔记(2)——GPIO接口使用
一、简介
ESP32 芯片有 40 个物理 GPIO pad。每个 pad 都可用作一个通用 IO,或连接一个内部的外设信号。IO_MUX、RTC IO_MUX 和 GPIO 交换矩阵用于将信号从外设传输至 GPIO pad。这些模块共同组成了芯片的 IO 控制。
注意:其中 GPIO 34-39 仅用作输入管脚,其他的既可以作为输入又可以作为输出管脚。
GPIO6-11通常用于SPI闪存。
1.1 官方资料
ESP-IDF 编程指南——GPIO&RTC GPIO
ESP32 技术参考手册——4 IO_MUX 和 GPIO 交换矩阵 (GPIO, IO_MUX)
gpio_example
1.2 包含头文件
#include "driver/gpio.h"
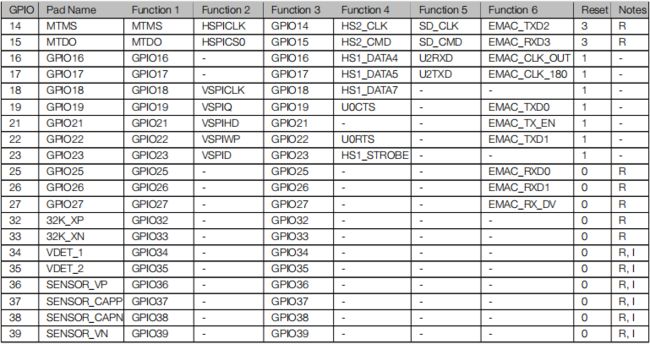
1.3 IO功能表

二、GPIO输出
2.1 引脚确定
我使用的是 ESP32-LyraT V4.3 开发板

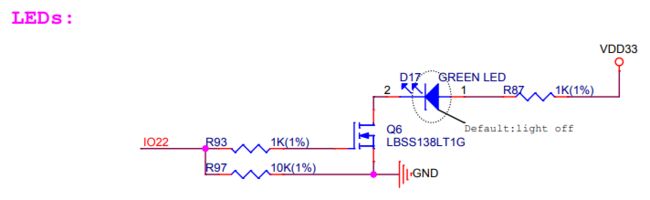
有个 IO 口为 22 的绿色 LED 灯
2.2 简单方法
gpio_pad_select_gpio(GPIO_NUM_22); // 选择一个GPIO
gpio_set_direction(GPIO_NUM_22, GPIO_MODE_OUTPUT);// 把这个GPIO作为输出
gpio_set_level(GPIO_NUM_22, 0); // 把这个GPIO输出低电平
2.3 结构体方法
#define GPIO_OUTPUT_IO_0 22
#define GPIO_OUTPUT_PIN_SEL (1ULL<// 配置GPIO_OUT位寄存器
void gpio_init(void)
{
gpio_config_t io_conf; // 定义一个gpio_config类型的结构体,下面的都算对其进行的配置
io_conf.intr_type = GPIO_PIN_INTR_DISABLE; // 禁止中断
io_conf.mode = GPIO_MODE_OUTPUT; // 选择输出模式
io_conf.pin_bit_mask = GPIO_OUTPUT_PIN_SEL; // 配置GPIO_OUT寄存器
io_conf.pull_down_en = 0; // 禁止下拉
io_conf.pull_up_en = 0; // 禁止上拉
gpio_config(&io_conf); // 最后配置使能
}
gpio_set_level(GPIO_OUTPUT_IO_0, 0); // 把这个GPIO输出低电平
gpio_set_level(GPIO_OUTPUT_IO_0, 1); // 把这个GPIO输出高电平
2.4 LED灯闪烁
#include 三、GPIO输入
3.1 引脚确定
我使用的是 ESP32-LyraT V4.3 开发板

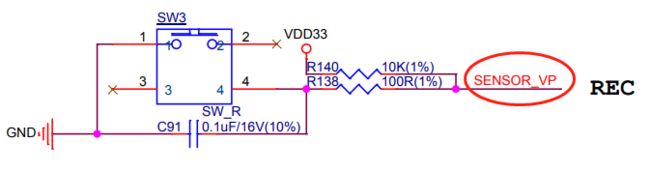
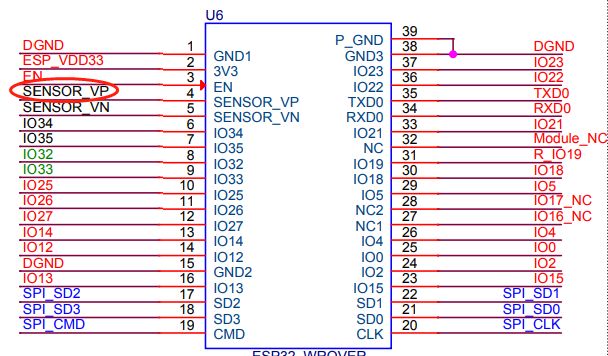
有个 IO 口为 36 的按键,SENSOR_VP--->GPIO36
3.2 简单方法
gpio_pad_select_gpio(GPIO_NUM_36); // 选择一个GPIO
gpio_set_direction(GPIO_NUM_36, GPIO_MODE_INPUT); // 把这个GPIO作为输入
gpio_get_level(GPIO_NUM_36);
3.3 结构体方法
#define GPIO_INPUT_IO_0 36
#define GPIO_INPUT_PIN_SEL (1ULL<// 配置GPIO_IN位寄存器
void gpio_init(void)
{
gpio_config_t io_conf; // 定义一个gpio_config类型的结构体,下面的都算对其进行的配置
io_conf.intr_type = GPIO_PIN_INTR_DISABLE; // 禁止中断
io_conf.mode = GPIO_MODE_INPUT; // 选择输入模式
io_conf.pin_bit_mask = GPIO_INPUT_PIN_SEL; // 配置GPIO_IN寄存器
io_conf.pull_down_en = 0; // 禁止下拉
io_conf.pull_up_en = 0; // 禁止上拉
gpio_config(&io_conf); // 最后配置使能
}
gpio_get_level(GPIO_INPUT_IO_0, 0); // 读取这个GPIO电平
3.4 轮询检测按键输入
500ms读取GPIO36的输入电平状态,并且打印出来!
#include 查看打印:
四、GPIO中断
4.1 引脚确定
同上 3.1
4.2 触发方式
GPIO_INTR_DISABLE //禁用GPIO中断
GPIO_INTR_POSEDGE //GPIO中断类型:上升沿
GPIO_INTR_NEGEDGE //下降沿
GPIO_INTR_ANYEDGE //上升沿和下降沿
GPIO_INTR_LOW_LEVEL //输入低电平触发
GPIO_INTR_HIGH_LEVEL //输入高电平触发
4.2.1 简单方法
当使用启用睡眠模式的ADC或Wi-Fi时,请不要使用GPIO 36和GPIO 39的中断。
gpio_pad_select_gpio(GPIO_NUM_36);
gpio_set_direction(GPIO_NUM_36, GPIO_MODE_INPUT);
gpio_intr_enable(GPIO_NUM_36);
gpio_set_intr_type(GPIO_NUM_36, GPIO_INTR_NEGEDGE);
gpio_pullup_en(GPIO_NUM_36);
4.2.2 结构体方法
输入模式:不下拉,内部上拉!原因在于内部上拉,就是高电平短脚,可以检测到下降沿。
#define GPIO_INPUT_IO_0 36
#define GPIO_INPUT_PIN_SEL (1ULL<// 配置GPIO_IN位寄存器
void gpio_init(void)
{
gpio_config_t io_conf; // 定义一个gpio_config类型的结构体,下面的都算对其进行的配置
io_conf.intr_type = GPIO_INTR_NEGEDGE; // 下降沿触发
io_conf.mode = GPIO_MODE_INPUT; // 选择输入模式
io_conf.pin_bit_mask = GPIO_INPUT_PIN_SEL; // 配置GPIO_IN寄存器
io_conf.pull_down_en = GPIO_PULLDOWN_DISABLE;
io_conf.pull_up_en = GPIO_PULLUP_ENABLE; // 内部上拉
gpio_config(&io_conf); // 最后配置使能
}
4.3 配置FreeRTOS任务和队列
注意:gpio_isr_handler中断回调函数是加载在IRAM_ATTR中,不能执行其他耗时操作,包括printf打印信息
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "freertos/queue.h"
#include "driver/gpio.h"
#define ESP_INTR_FLAG_DEFAULT 0
static xQueueHandle gpio_evt_queue = NULL; //定义一个队列返回变量
void IRAM_ATTR gpio_isr_handler(void* arg)
{
//把中断消息插入到队列的后面,将gpio的io参数传递到队列中
uint32_t gpio_num = (uint32_t) arg;
xQueueSendFromISR(gpio_evt_queue, &gpio_num, NULL);
}
void gpio_task(void* arg)
{
printf(" \r\n start gpio task ...\r\n ");
uint32_t io_num;
for(;;)
{
//不断读取gpio队列,读取完后将删除队列
if(xQueueReceive(gpio_evt_queue, &io_num, portMAX_DELAY))
{
printf("GPIO[%d] intr, val: %d\n", io_num, gpio_get_level(io_num));
}
}
}
void gpio_intr_init(void)
{
// 注册中断服务
gpio_install_isr_service(ESP_INTR_FLAG_DEFAULT);
// 设置GPIO的中断回调函数
gpio_isr_handler_add(GPIO_INPUT_IO_0, gpio_isr_handler, (void*) GPIO_INPUT_IO_0);
// 创建一个消息队列,从中获取队列句柄
gpio_evt_queue = xQueueCreate(10, sizeof(uint32_t));
// 创建GPIO检测任务
xTaskCreate(gpio_task // 任务函数
, "gpio_task_example" // 任务名字
, 2048 // 任务堆栈大小
, NULL // 传递给任务函数的参数
, 10 // 任务优先级
, NULL); // 任務句柄
}
4.4 按键中断
注意:gpio_isr_handler中断回调函数是加载在IRAM_ATTR中,不能执行其他耗时操作,包括printf打印信息
#include // 配置GPIO_IN位寄存器
#define ESP_INTR_FLAG_DEFAULT 0
static xQueueHandle gpio_evt_queue = NULL; //定义一个队列返回变量
void IRAM_ATTR gpio_isr_handler(void* arg)
{
//把中断消息插入到队列的后面,将gpio的io参数传递到队列中
uint32_t gpio_num = (uint32_t) arg;
xQueueSendFromISR(gpio_evt_queue, &gpio_num, NULL);
}
void gpio_task(void* arg)
{
printf(" \r\n start gpio task ...\r\n ");
uint32_t io_num;
for(;;)
{
//不断读取gpio队列,读取完后将删除队列
if(xQueueReceive(gpio_evt_queue, &io_num, portMAX_DELAY))
{
printf("GPIO[%d] intr, val: %d\n", io_num, gpio_get_level(io_num));
}
}
}
void gpio_init(void)
{
gpio_config_t io_conf; // 定义一个gpio_config类型的结构体,下面的都算对其进行的配置
io_conf.intr_type = GPIO_INTR_NEGEDGE; // 下降沿触发
io_conf.mode = GPIO_MODE_INPUT; // 选择输入模式
io_conf.pin_bit_mask = GPIO_INPUT_PIN_SEL; // 配置GPIO_IN寄存器
io_conf.pull_down_en = GPIO_PULLDOWN_DISABLE;
io_conf.pull_up_en = GPIO_PULLUP_ENABLE; // 内部上拉
gpio_config(&io_conf); // 最后配置使能
}
void gpio_intr_init(void)
{
// 注册中断服务
gpio_install_isr_service(ESP_INTR_FLAG_DEFAULT);
// 设置GPIO的中断回调函数
gpio_isr_handler_add(GPIO_INPUT_IO_0, gpio_isr_handler, (void*) GPIO_INPUT_IO_0);
// 创建一个消息队列,从中获取队列句柄
gpio_evt_queue = xQueueCreate(10, sizeof(uint32_t));
// 创建GPIO检测任务
xTaskCreate(gpio_task // 任务函数
, "gpio_task_example" // 任务名字
, 2048 // 任务堆栈大小
, NULL // 传递给任务函数的参数
, 10 // 任务优先级
, NULL); // 任務句柄
}
void app_main(void)
{
//gpio_pad_select_gpio(GPIO_NUM_36);
//gpio_set_direction(GPIO_NUM_36, GPIO_MODE_INPUT);
//gpio_intr_enable(GPIO_NUM_36);
//gpio_set_intr_type(GPIO_NUM_36, GPIO_INTR_NEGEDGE);
//gpio_pullup_en(GPIO_NUM_36);
gpio_init();
gpio_intr_init();
while(1)
{
vTaskDelay(1000 / portTICK_PERIOD_MS);
}
}
查看打印:

• 由 Leung 写于 2021 年 4 月 14 日
• 参考:乐鑫Esp32学习之旅③ 认识并学习使用esp32的GPIO接口,开始点亮您的第一盏 LED和中断回调实现按键功能