Autosar CyberSecurity之HSM和CSM, CryIf,Crypto Driver之间的关系,科普分享,理论讲解软件配置
目录
汽车网络信息安全概述
网络安全相关
AUTOSAR CP 信息安全架构
汽车信息安全之锚:HSM
英飞凌AURIX系列MCU的HSM
AUTOSAR中的HSM接口:Crypto Stack
CSM, CryIf,Crpto Driver每层都做了什么
Crypto Driver(CryDrv)配置
1、CryptoPrimitives配置用到的算法
2、配置CryptoDriverObjects
3、配置CryptoGeneral
4、配置CryptoKeyElements
5、配置CryptoKeyTypes
6、配置CryptoKeys
Crypto Interface(CryIf)配置
1、配置CryIfChannels:
2、配置CryIfCryptoModules
3、 CryIfKeys配置
4、CryIfGeneral配置
Crypto Service Manager(CSM)配置
1. CsmJobs配置
2、CsmPrimitives配置
3、CsmKeys配置
4、CsmQueues配置
5、CsmGeneral配置
6、CsmCallbacks配置
CSM API的调用
同步作业模式
异步作业模式
CSM Job的调用
汽车网络信息安全概述
首先按照惯例,先对汽车网络安全做个科普。
随着汽车网联化和智能化,汽车不再孤立,越来越多地融入到互联网中。同时,汽车也慢慢成为潜在的网络攻击目标。
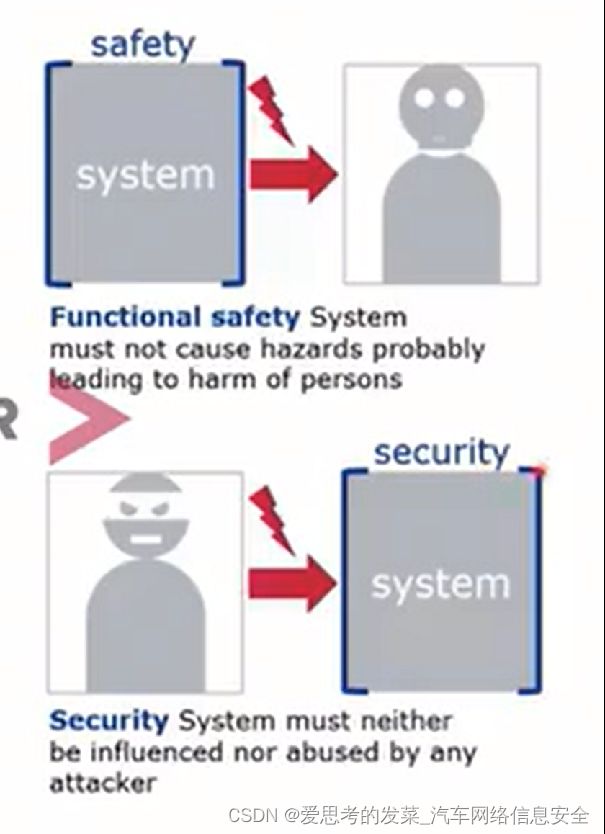
这边不做过多赘述,只是强调一下 网络安全和功能安全的区别,经常会有人疑惑这两者之间的关系,这边引用一张vector的图,非常清晰的展示了两者之间的区别:
- 功能安全是保护人为目的的,车如果发生故障的话,目的是让车能尽可能的可控,不会失控去对人做出伤害
- 网络安全是反过来保护车辆系统的,防止黑客的入侵,控制或者窃取车辆信息,使车辆不可控,或者干一些违法的事情
网络安全相关
那么车辆哪些部件是网络安全相关的,哪些不是相关的呢?ISO21434中已经给出明确的定义,如右图所示,展示了如何判定汽车中的相关组件是否和网络安全相关。这个判断一般是由主机厂做,然后把需求给到下层供应商,所以我们不做过多描述:
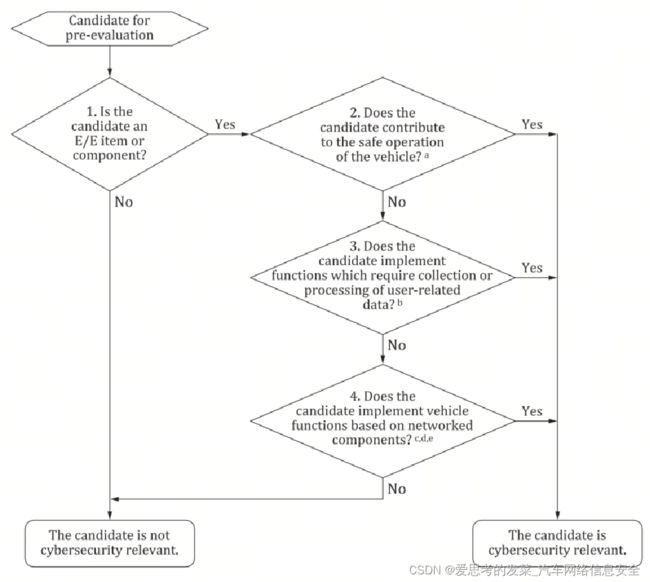 这边我们做出如下总结:
这边我们做出如下总结:
1. 像T-BOX,TCU,网关等节点或功能,必须考虑网络安全,因为它们有直接的对外连接
2. 具有高功能安全等级,比如ASIL C/D的节点,也要实施网络安全
3. 涉及存储和处理与车辆或者驾驶员相关数据的节点,也需要实施网络安全措施,以防止重要信息泄露或者被窃取
4. 有无线连接的节点,比如蓝牙,NFC,WIFI等有关的组件也要涉及网络安全,因为他们是最容易被攻击的组件
5. 对外连接的节点,比如对外连接的总线,OBD
对于网络安全相关的部件需要做哪些安全保护措施,这边引用了vector一张图来展示,个人觉得比较清晰:

AUTOSAR CP 信息安全架构
好了,前面科普啰嗦了太多了,那么在AUTOSAR架构中是怎么实现网络安全功能的呢?
这个话题涉及的内容就比较多,今天我们只讲Crypto Stack的实现。
如下图,是AUTOSAR CP 信息安全架构图:
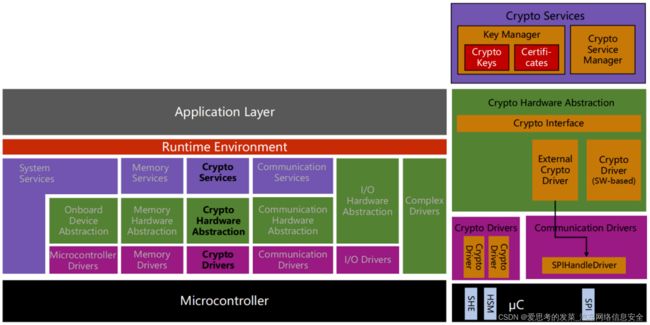 可以看到Crypto Stack分为三部分
可以看到Crypto Stack分为三部分
Crypto Service Manager(CSM): 是其他软件模块调用加解密模块的第一接口。应用层SWC通过RTE访问CSM,而其他底层软件(BSW)或者复杂驱动(CDD)则可以直接调用CSM。同时CSM也负责安全相关任务的队列管理,即优先级管理。
Crypto Interface(CryIf): CSM往下调用的接口模块,每一个CryIf中的加密基元都会与CSM中的一个服务相对应。而且CryIf支持分发相关任务,进一步调用不同的驱动
Crypto Driver(CryDrv): 驱动模块,访问相关部件,实现加解密操作,例如访问加解密加速器或者真随机数生成器等
为什么会存在 CSM, CryIf,Crpto Driver?
是为了将硬件HSM的接口做一个封装,以便上层服务可以标准化调用,而不受HSM的不同的影响。
汽车信息安全之锚:HSM
那我们就先了解一下HSM。
HSM是硬件安全模块的英语缩写,全称是Hardware Security Module。 随着信息安全变得越来越重要,在通信领域常用的AES、SHA、RSA等加密算法被越来越多地应用到汽车上。但通常这类加解密算法都需要大量的数学运算,需要消耗很多CPU时间和资源,汽车上的ECU又有比较高的实时性要求,为了节省主CPU的资源,HSM应运而生。

HSM(Hardware Security Module),它一般会有一个独立的CPU,专门用来进行加解密运算,还有一些针对特定算法的硬件加速器(如AES-128、SHA-256等)。有了HSM模块,程序中就可以把加解密运算交给HSM来执行,主CPU就可以去做其他工作,一段时间后来查询结果,或等待HSM计算完成后通过中断等方式通知主CPU计算结果即可。
而且HSM通常还拥有单独的存储区,包括RAM和NVM,HSM的存储区在正常运行状态下应只允许HSM核读写,主核不能读写。这样就可以把算法秘钥等重要数据存储在HSM存储区,与主核进行隔离,进一步加强安全性。此外HSM模块还会带有真随机数生成器等加密算法常用外设。
HSM两个主要功能:
第一个是存储管理密钥。 第二个是加速加解密算法
英飞凌AURIX系列MCU的HSM
以TC397为例,HSM作为外设之一,挂载在单片机的SPB系统外设总线上。
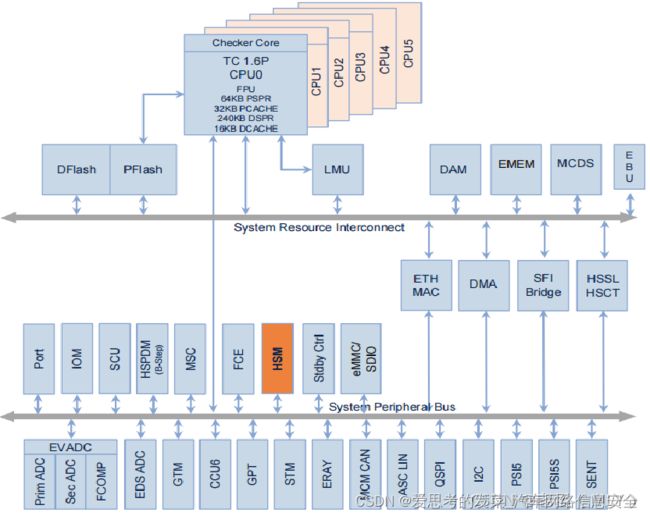
HSM展开后的架构图,HSM有一个基于ARM Cortex-M3的CPU,有随机数生成器TRNG,AES算法等硬件加速器,以及中断、Timer等组成部分。
其中存储软件程序和数据的PFlash和DFlash实际上与芯片的其他部件共用一块Flash,但是能通过TriCore的访问控制设置,来保护HSM所对应的Flash区域不被非法访问或篡改。安全密钥的存储就是在其中的DFlash里。

AUTOSAR中的HSM接口:Crypto Stack
除了硬件实现,广义的HSM还包括相应的固件和驱动。AUTOSAR跟HSM最相关的就是Crypto Stack:将硬件HSM的接口做一个封装,以便上层服务可以标准化调用,而不受HSM的不同的影响。

上层应用需要执行加密相关的任务时的一个基本工作流程,SWC提供必要的data及jobid,调用CSM提供的接口,接下来分析主核的CSM stack的各个模块为了完成这个任务需要的配置。

CSM, CryIf,Crpto Driver每层都做了什么
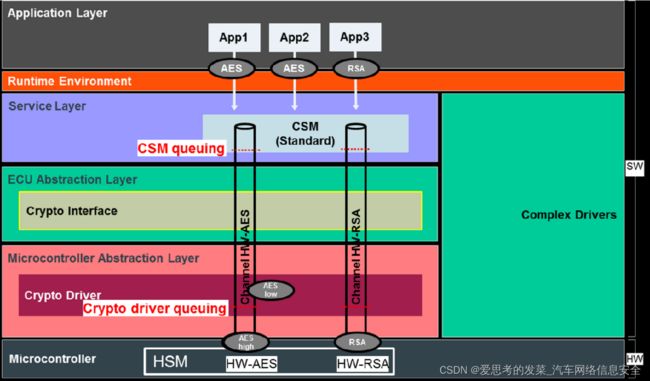
举个栗子, HSM有两个加密驱动对象Crypto Driver Object:HW-AES和HW-RSA
它们每个都有自己的通道。每个通道连接到一个CSM队列和一个Crypto Driver Object队列。
两个Crypto Driver Object都在分别处理一个加密作业:AES-high和RSA
其中一个Crypto Driver Object的队列包含另一个作业(AES-low)。如果HSM的HW-AES已经完成了AES-high的任务,则将AES-low的任务作为下一个任务处理。
假设应用程序的新作业调用RSA:
如果RSA的Crypto Driver Object不繁忙,则立即处理该任务。
如果RSA的Crypto Driver Object很忙,但是Crypto Driver Object的队列未满,则该作业将按优先级顺序列在该队列中。一旦Crypto Driver Object空闲,将执行Crypto Driver Object队列中具有最高优先级的作业。
如果RSA的Crypto Driver Object很忙,并且Crypto Driver Object的队列已满,则该作业将按照优先级顺序存储在CSM队列中。·
如果RSA的Crypto Driver Object忙,且Crypto Driver Object队列和CSM队列都已满,CSM会拒绝请求。
如果RSA的Crypto Driver Object是活动的,则作业已经在加密驱动程序中启动,正在等待更多的数据来处理或完成命令。
Crypto Driver(CryDrv)配置
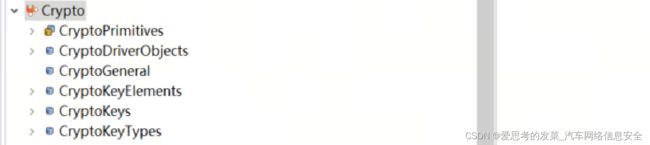
主核的Crypto层主要负责与HSM的交互,将任务转发给HSM,并获取响应 Crypto模块需要如下container,如果不存在就需要右键Crypto添加这些Container.
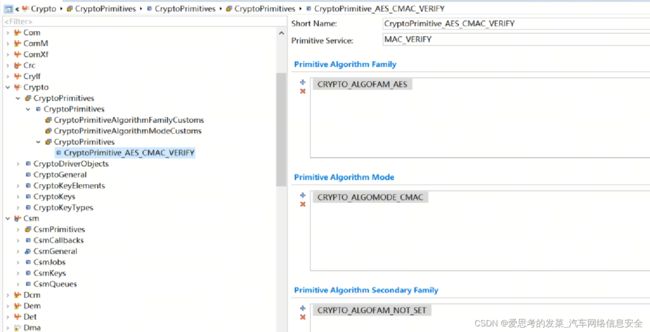
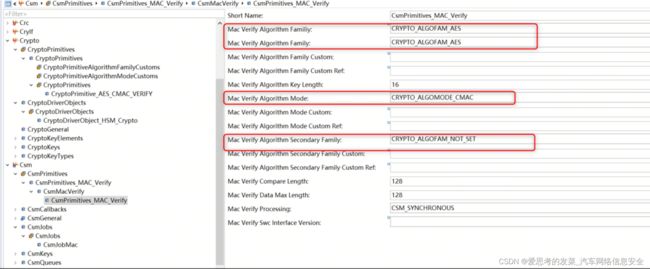
1、CryptoPrimitives配置用到的算法
我这边举了一个CAMC Verify的例子.
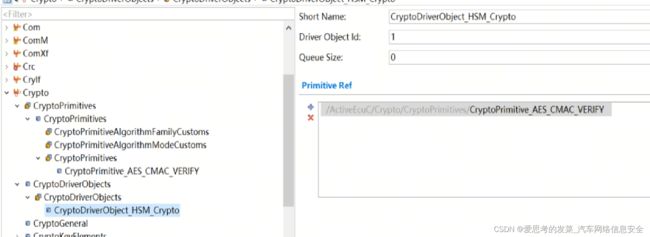
2、配置CryptoDriverObjects
我这边只添加一个Object: HSM_Crypto
3、配置CryptoGeneral

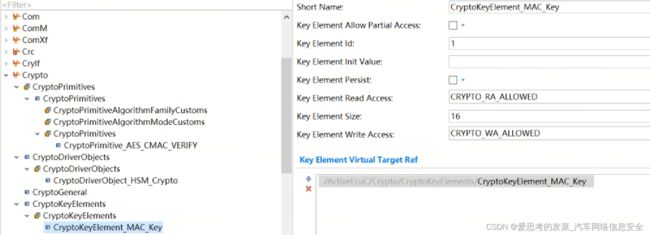
4、配置CryptoKeyElements
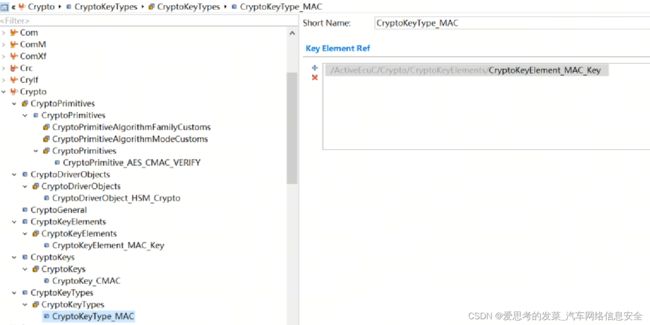
5、配置CryptoKeyTypes
6、配置CryptoKeys

Crypto Interface(CryIf)配置
CryIf将CSM层的请求转发到对应的CryptoDriver。它涉及到的主要配置就是CryIfChannel。它将Csm层的job和实际处理cryptoDriverObject对应起来。 CryIf模块需要如下container: CryIfChannels, CryIfCryptoModules, CryIfKeys, CryIfGeneral.

1、配置CryIfChannels:
Driver Objects Ref就是Crypto模块配置中配置好的

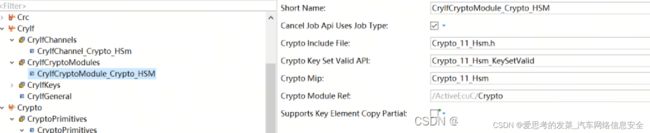
2、配置CryIfCryptoModules
3、 CryIfKeys配置

4、CryIfGeneral配置

Crypto Service Manager(CSM)配置
CSM层提供标准的接口给SWC和BSW来实现加解密相关的功能,可以是同步的,也可以时异步的。 Csm模块需要如下Container: CsmPrimitives, CsmCallbacks, CsmGeneral, CsmJobs, CsmKeys, CsmQueues.

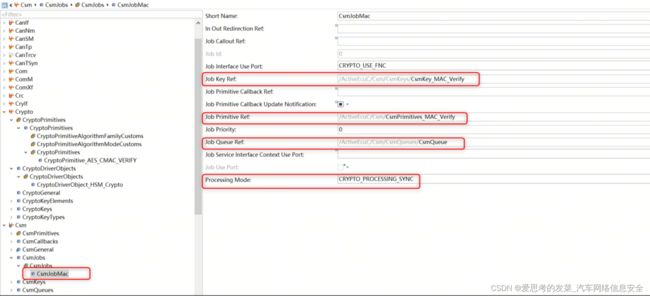
1. CsmJobs配置
SWC或者BSW调用接口时除了data之外只传了jobid,而没有类似使用什么key,什么算法之类的东西,CSM job封装了所有这些信息,可以被视为在CryptoDriverObject中实现的加密算法的实例。所以通过CSMJob为入口分析CSM的配置
2、CsmPrimitives配置
CSM job会引用到Csm层的CsmPrimitive
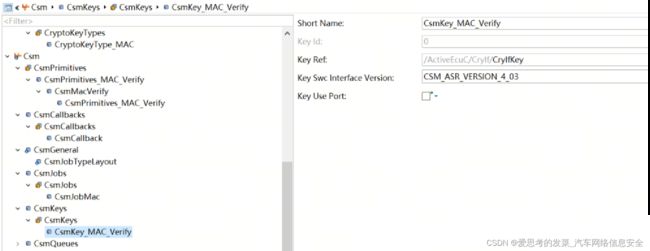
3、CsmKeys配置
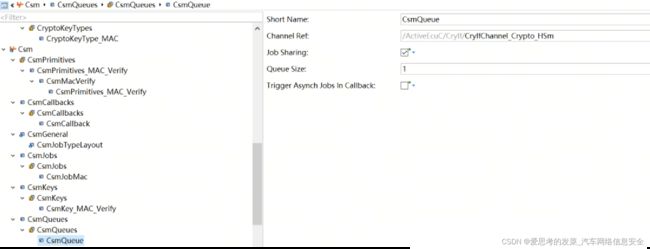
4、CsmQueues配置
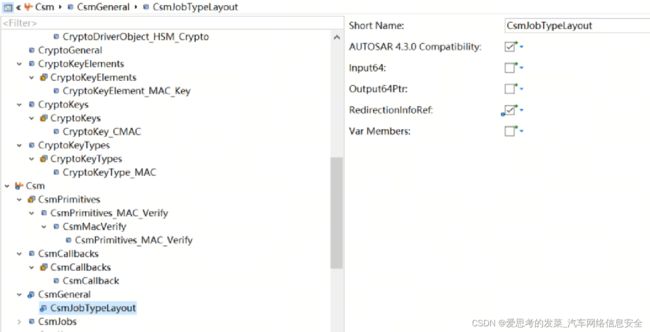
5、CsmGeneral配置
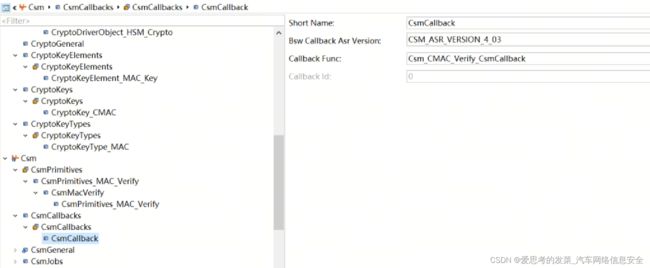
6、CsmCallbacks配置
异步执行作业时需要有callback函数。根据需要配置,这边只是举个例子
CSM API的调用
CSM 的 API 大致可以分为两类:直接API(主要用于密钥管理)和 基于作业的API(主要用于加解密操作)

直接 API(Direct API):
直接对应于 CryIf 和加密驱动程序中的函数。这些函数只能同步调用。CSM 会将参数从应用程序直接传递给函数调用。
基于作业的 API(Job-based API):
使用作业结构 Crypto_JobType,它包含静态和动态参数以及对结构的引用。此数据为加密驱动程序提供执行该作业所需的所有信息。每个使用作业的服务都将使用此结构。服务的所有必要参数将由 CSM 打包到结构的元素中,然后将调用 CryIf,而这又将调用配置的加密驱动程序。
直接API是直接调用,只能同步调用,比较简单,这里不做过多描述
我这边想要讲一下基于job的API的调用的同步模式,和异步模式
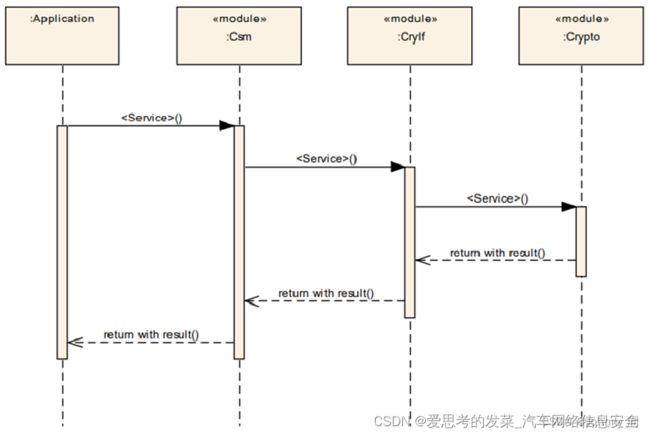
同步作业模式
Synchronous Mode Synchronous mode: CSM服务Job在调用方的上下文中立即执行,函数返回结果直接可用 因为对于同步作业处理来说,队列排队可能用途不大。所以如果选择了同步作业处理,则建议把队列大小设定为 0。 但是,如果通道同时支持同步和异步作业,则队列排队机制还是有使用的必要。在 Csm_MainFunction() 中,可以将排队的作业传递给给 CRYIF 模块。
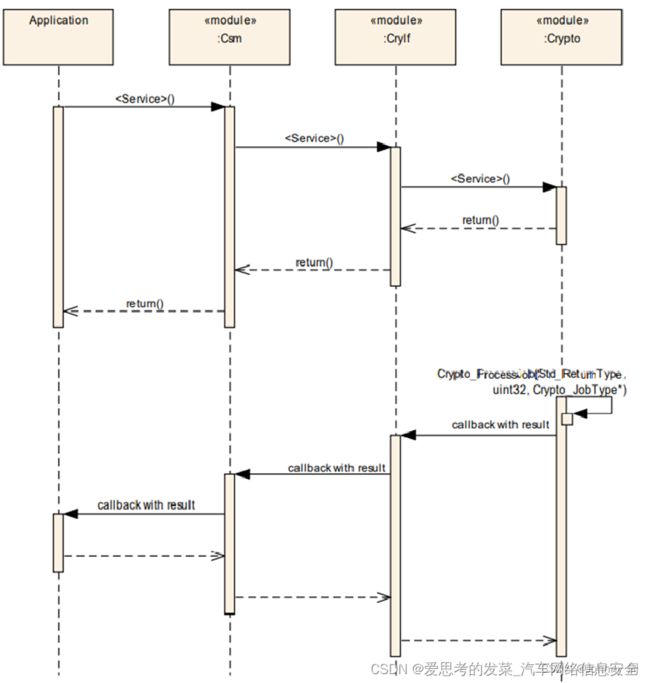
异步作业模式
Asynchronous Mode Asynchronous mode: 异步作业稍后由专用CRYPTO在预先安排的主函数上下文中或硬件中处理。如果特定的CRYPTO驱动程序对象因为繁忙而拒绝该作业,CSM将服务请求放在相应的CSM作业队列中。CRYPTO使用CRYIF的回调函数通知CRYIF异步作业的完成。CRYIF通过CSM的回调函数转发结果。
CSM Job的调用
最后来总结一下CSM job调用的流程:
CSM Job可能有多个队列,每个队列映射到一个单独的加密驱动对象Crypto Driver Object(CDO),从而可以访问CDO的加密原语crypto primitives,CRYPTO因为繁忙拒绝了CSM的服务请求后,特定的Job会根据其优先级放入相应的CSM队列中, 在Csm_MainFunction()循环调用期间,排队的Job被传递给CRYIF。CRYIF将把Job转发给特定的CRYPTO。 为了优化CDO的硬件使用CDO也可以有选择的有Job Queuing。 每个Job的优先级根据其配置决定其优先级,优先级值越高,优先级越高,Job将根据其优先级执行。

后续大家有需要的话,我这边可以总结一下具体Autosar里网络安全相关的功能,比如SecOC, IDS入侵检测系统,是怎么调用Crypto Stack去实现的,这边文章就暂时到这里了。