score-based model介绍
score-based model介绍
参考:https://www.bilibili.com/video/BV1VP411u71p/
论文原文:Generative Modeling by Estimating Gradients of the Data Distribution
引言
宋飏博士的这篇 Generative Modeling by Estimating Gradients of Data Distribution 是第一篇 score-based model 的工作,甚至可以说是近几年第一篇 diffusion 模型的工作。通过预测数据分布的对数梯度(即 score 分数)来构建一个生成模型。score-based model 的核心无疑就是 score,怎么估计 score,求得 score 之后如何进行图片生成,这是理解 score-based model 的两个核心问题。
在当时,主流的生成模型有两个分支,分别是基于似然的模型(likelihood-based model)和隐式的生成模型(implicit generative model):
- 基于似然的模型
- 直接建模数据分布
- 代表方法:VAE、flow-based model
- 缺点:由于理论推导上的原因,对网络结构有很大的限制(如 VAE 中间隐变量需为高斯分布,flow-based model 网络结构需可逆)
- 隐式的生成模型
- 间接拟合(如对通过抗训练)数据分布
- 代表方法:GAN
- 缺点:训练困难,容易崩
本文提出了一种新的生成模型,即 score-based model。该方法首先通过 score-matching 来估计数据的对数梯度(即 score),然后使用基于退火的朗之万动力学的方法来进行采样,进行数据生成。由于在数据分布比较稀疏的低密度区域,对 score 的估计不是很准,作者提出使用不同强度的高斯噪声对真实数据分布进行扰动,从而提高 score 估计的准确性。在采样时,作者提出了一种退火的朗之万动力学采样方法,加入强度不断递减的噪声扰动,最终逼近真实的数据分布。
score-based model 改善了之前两类方法的缺点。首先,score-based model 对网络结构基本没有限制,任何图到图的网络都可以,其次,score-based model 也不需要对抗训练,优化形式简洁,训练稳定。
方法
score-based model 不是直接学习数据的概率分布 p θ ( x ) p_\theta(x) pθ(x),而是学习 score,即数据分布的对数梯度 ∇ x log p θ ( x ) \nabla_x\log p_\theta(x) ∇xlogpθ(x)。
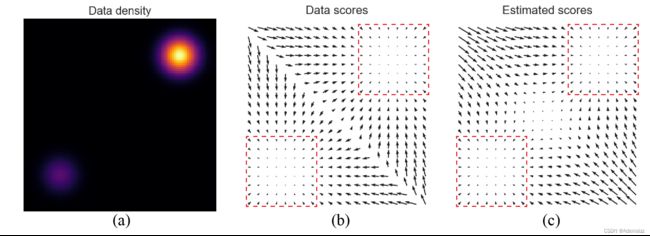
下图分别展示了数据分布的密度,越亮的地方数据密度越高,数据分布的真实 score,和估计的 score,score 是一种梯度,即图中箭头所指的方向。
我们接下来围绕之前提到的 score-based model 中的两个核心问题来进行介绍:如何求 score;求得 score 之后如何采样。我们先看第二个问题。
求得score之后,如何进行采样生成
假设我们已经能够通过某个模型 s θ ( x ) s_\theta(x) sθ(x) 来估计空间中每一个位置的 score(后面会讲究竟如何估计 score),即知道当前位置朝什么方向走能抵达高数据密度区域,那我们就可以按照这个方向走,最终抵达数据分布密集的区域,从而完成采样。具体来说,有如下采样公式:
x i + 1 ← x i + ϵ log p ( x ) + 2 ϵ z i , i = 0 , 1 , . . . , K x_{i+1}\leftarrow x_i+\epsilon\log p(x)+\sqrt{2\epsilon}z_i,\ \ \ \ i=0,1,...,K xi+1←xi+ϵlogp(x)+2ϵzi, i=0,1,...,K
注意其中 z i z_i zi 是一个随机噪声,score-based model 的采样过程是存在随机性的。
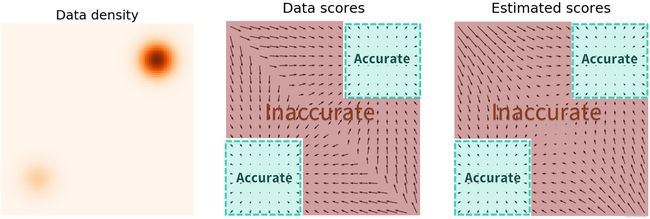
看起来很简单,前提是我们已经能够准确地求 score 了。然而问题是,我们并不能准确地估计 score,至少在低数据密度区域,不够准。
在低数据密度区域,模型 s θ ( x ) s_\theta(x) sθ(x) 对于 score 的估计是不准的。而且不幸的是,在整个空间中,高数据密度区域一定是稀疏的。也就是说,刚开始我们随机一个起始位置,几乎必定是落在低数据密度区域的。那么我们采样初期的几步,几乎就是乱走的,而初期乱走,由于高数据密度区域的稀疏性,基本就不可能走到高数据密度区域了,就会一直在低数据密度区域打转。
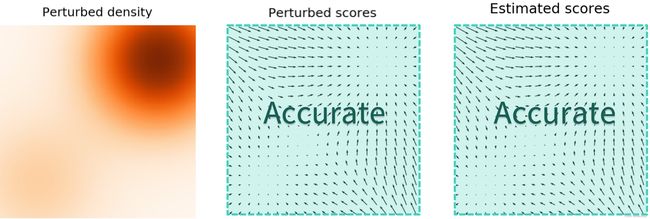
为了解决这个问题,使得模型在采样初期,在低数据密度区域,也能够相对较准地估计 score,作者提出对真实数据分布加噪声扰动。在加入噪声扰动之后,数据分布密度较高的位置就会大很多,从而使得模型在前期随机选择的位置,也能够对 score 有较准地估计。极端情况下,如果加的噪声足够大,整个分布几乎成了高斯分布,此时 score 甚至是可以解析的,那么我们当然能准确地求出 score。
然而,加入噪声之后,分布还是我们想要的真实数据分布吗?当然不是,如果加入过强的噪声,最终采样出来的也就是一个噪声了。
这里我们就面临一个两难的问题:如果不加噪声,虽然数据分布是真实的,但对 score 的估计不准,造成我们在低密度数据区域乱转;而如果加入噪声过强,虽然对噪声的估计准了,但最终采样不到我们想要的数据分布。因此,我们需要在准确估计 score 和维持原始分布之间进行权衡。
其实权衡思路也很明确,在采样初期,一定落在低密度区域,score 估计极其不准,这时需要加高强度的噪声扰动,使我们能大致按照正确的方向走,而到了采样的后期,我们已经来到中高密度数据区域,此时就要加较小的噪声扰动,使得我们最终能够采样到真实的数据分布附近。
最终,作者提出了如下退火朗之万动力学的采样算法。在该采样算法中,有两个循环,其中外层循环 i 遍历从 1 到 L,表示不同的噪声级别,级别越高,噪声强度越小;而内层循环 t 从 1 到 T,表示该噪声强度下采样的时间步,总的步数就是 L * T。特别的,如果 T = 1,即在每个噪声强度只采样一步,就类似 DDPM 了。
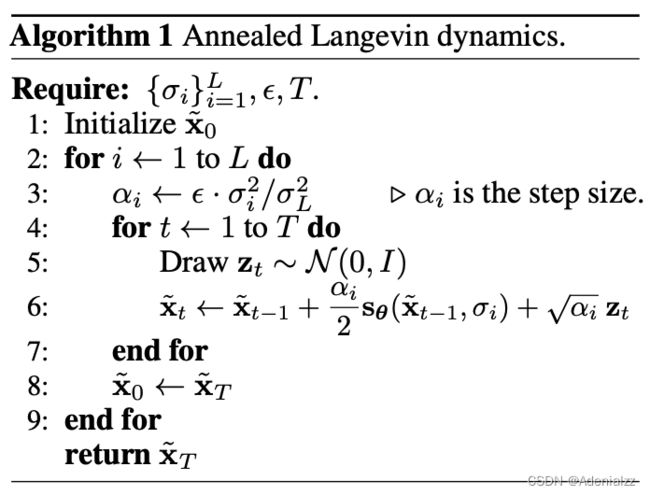
到这里,我们已经回答了问题 (2):求得 score 之后如何进行采样生成。即通过在采样不同阶段添加不同程度的噪声扰动,权衡 score 估计的准确性和数据分布的真实性,依据退火的朗之万动力学采样方法,一步一步逼近真实数据的分布。
当然,这一切都是建立在我们已经能够求 score 的前提下,那么 score-based model 究竟是怎么求 score 的呢?
如何求score
求 score 的方法就是之前提到的 score-matching。
这里我们套用 DDPM 的噪声假设,和 score-based model 原文的表示略有出入:
x t ∼ N ( α ˉ t x 0 , ( 1 − α ˉ t ) I ) x_t\sim\mathcal{N}(\sqrt{\bar\alpha_{t}}x_0,\ \ (1-\bar\alpha_t)I) xt∼N(αˉtx0, (1−αˉt)I)
该多元高斯分布的分布函数为:
p ( x t ) ∝ exp { − ( x t − α ˉ t x 0 ) ⊤ ( x t − α ˉ t x 0 ) 2 ( 1 − α ˉ t ) } p(x_t)\propto\exp\{-\frac{(x_t-\sqrt{\bar\alpha_t}x_0)^\top(x_t-\sqrt{\bar\alpha_t}x_0)}{2(1-\bar\alpha_t)}\} p(xt)∝exp{−2(1−αˉt)(xt−αˉtx0)⊤(xt−αˉtx0)}
我们要求的 score 是:
∇ x log p ( x t ) \nabla_x\log p(x_t) ∇xlogp(xt)
带入得:
∇ x log p ( x t ) = − x t − α ˉ t x 0 1 − α ˉ t = − 1 − α ˉ t ϵ 1 − α ˉ t \nabla_x\log p(x_t)=-\frac{x_t-\sqrt{\bar\alpha_t}x_0}{1-\bar\alpha_t}=-\frac{\sqrt{1-\bar\alpha_t}\ \epsilon}{1-\bar\alpha_t} ∇xlogp(xt)=−1−αˉtxt−αˉtx0=−1−αˉt1−αˉt ϵ
可以看到,我们要估计的 score,与噪声 ϵ \epsilon ϵ 实际就差了一个系数。所以说,估计噪声,就相当于估计 score,也就是估计数据分布的对数梯度。DDPM、score-based model 这类扩散模型实际上都是去训练一个去噪网络。
至此,我们就回答了问题 (1):如何估计 score。答案就是训练一个去噪网络。估计噪声,就是估计 score。
理解这两个问题,就理解了 score-based model 的核心思想。
总结
同为扩散模型。score-based model 在很多地方与 DDPM 非常相近(yang song 后来的文章 也通过 SDE 统一了这两种形式)。通过理解两个关键问题。score-based model 的许多做法似乎有更好的解释性。
如何采样?通过加不同程度的高斯噪声来权衡 score 估计准确性和数据分布真实性。
如何估计 score?估计加入的噪声就是估计 score。