Java 深入理解 AQS 和 CAS 原理
AQS 介绍
AQS 全称是 Abstract Queued Synchronizer,一般翻译为同步器。它是一套实现多线程同步功能的框架,由大名鼎鼎的 Doug Lea 操刀设计并开发实现的。AQS 在源码中被广泛使用,尤其是在 JUC(Java Util Concurrent)中,比如 ReentrantLock、Semaphore、CountDownLatch、ThreadPoolExecutor。理解 AQS 对我们理解 JUC 中其他组件至关重要,并且在实际开发中也可以通过自定义 AQS 来实现各种需求场景。
注意:理解 AQS 需要一定的数据结构基础,尤其是双端队列,并对 Unsafe 有一定的了解。
ReentrantLock 和 AQS 的关系
我们主要通过 ReentrantLock 来理解 AQS 内部的工作机制。首先从 ReentrantLock 的 lock() 方法开始:
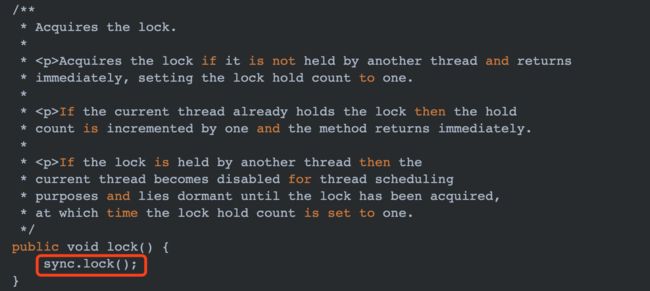
代码很简单,只是调用了一个 Sync 的 lock() 方法,这个 Sync 是什么呢?
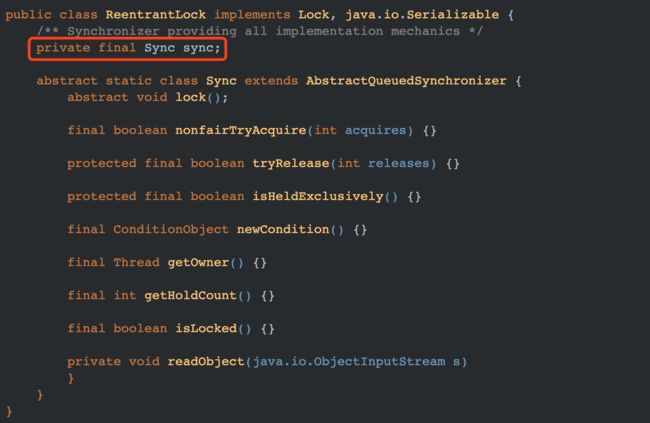
可以看出,Sync 是 ReentrantLock 中的一个内部类。ReentrantLock 并没有直接继承 AQS,而是通过内部类 Sync 来扩展 AQS 的功能,然后 ReentrantLock 中存有 Sync 的全局变量引用。
Sync 在 ReentrantLock 有两种实现:NonfairSync 和 FairSync,分别对应非公平锁和公平锁。以非公平锁为例,实现源码如下:
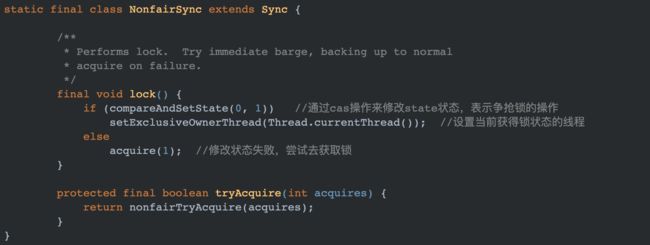
可以看出在非公平锁中的 lock() 方法中,主要做了如下操作:
-
如果通过 CAS 设置变量 State(同步状态)成功,表示当前线程获取锁成功,则将当前线程设置为独占线程。
-
如果通过 CAS 设置变量 State(同步状态)失败,表示当前锁正在被其他线程持有,则进入 Acquire 方法进行后续处理。
acruire() 方法定义在 AQS 中,具体如下:

acquire() 方法是一个比较重要的方法,可以将其拆解为 3 个主要步骤:
-
tryAcquire() 方法主要目的是尝试获取锁;
-
addWaiter() 如果 tryAcquire() 尝试获取锁失败则调用 addWaiter 将当前线程添加到一个等待队列中;
-
acquireQueued 处理加入到队列中的节点,通过自旋去尝试获取锁,根据情况将线程挂起或者取消。
以上 3 个方法都被定义在 AQS 中,但其中 tryAcquire() 有点特殊,其实现如下:

默认情况下直接抛异常,因此它需要在子类中复写,也就是说「真正的获取锁的逻辑由子类同步器自己实现。」
ReentrantLock 中 tryAcquire 的实现(非公平锁)如下:

解释说明:
-
获取当前线程,判断当前的锁的状态;
-
如果 state=0 表示当前是无锁状态,通过 cas 更新 state 状态的值,返回 true;
-
如果当前线程属于重入,则增加重入次数,返回 true;
-
上述情况都不满足,则获取锁失败返回 false。
最后用一张图表示 ReentrantLock.lock() 过程:
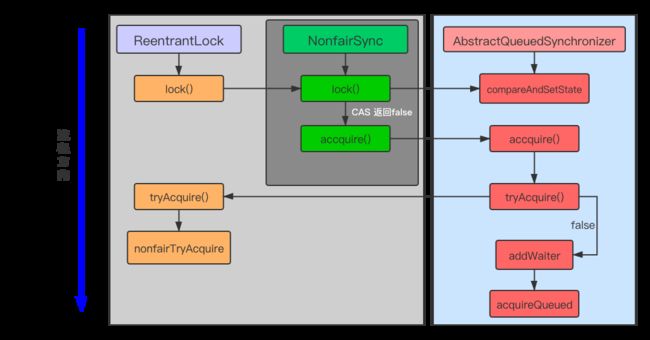
从图中我们可以看出,在 ReentrantLock 执行 lock() 的过程中,大部分同步机制的核心逻辑都已经在 AQS 中实现,ReentrantLock 自身只要实现某些特定步骤下的方法即可,这种设计模式叫作模板模式。如果你做过 Android 开发对这一模式应该非常熟悉。Activity 的生命周期的执行流程都已经在 framework 中定义好了,子类 Activity 只要在相应的 onCreate、onPause 等生命周期方法中提供相应的实现即可。
注意:不只 ReentrantLock,JUC 包中其他组件例如 CountDownLatch、Semaphor 等都是通过一个内部类 Sync 来继承 AQS,然后在内部中通过操作 Sync 来实现同步。这种做法的好处是将线程控制的逻辑控制在 Sync 内部,而对外面向用户提供的接口是自定义锁,这种聚合关系能够很好的解耦两者所关注的逻辑。
AQS 核心功能原理分析
首先看下 AQS 中几个关键的属性,如下所示:
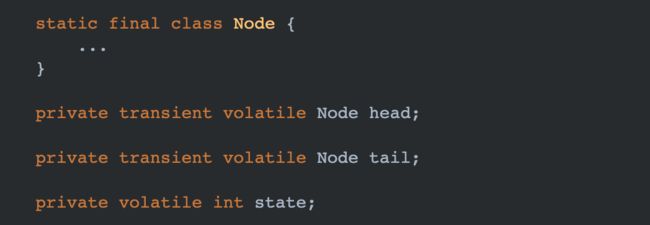
代码中展示了 AQS 中两个比较重要的属性 Node 和 state。
state 锁状态
state 表示当前锁状态。当 state = 0 时表示无锁状态;当 state>0 时,表示已经有线程获得了锁,也就是 state=1,如果同一个线程多次获得同步锁的时候,state 会递增,比如重入 5 次,那么 state=5。 而在释放锁的时候,同样需要释放 5 次直到 state=0,其他线程才有资格获得锁。
state 还有一个功能是实现「锁的独占模式或者共享模式」。
「独占模式:只有一个线程能够持有同步锁。」
比如在独占模式下,我们可以把 state 的初始值设置成 0,当某个线程申请锁对象时,需要判断 state 的值是不是 0,如果不是 0 的话意味着其他线程已经持有该锁,则本线程需要阻塞等待。
「共享模式:可以有多个线程持有同步锁。」
在共享模式下的道理也差不多,比如说某项操作我们允许 10 个线程同时进行,超过这个数量的线程就需要阻塞等待。那么只需要在线程申请对象时判断 state 的值是否小于 10。如果小于 10,就将 state 加 1 后继续同步语句的执行;如果等于 10,说明已经有 10 个线程在同时执行该操作,本线程需要阻塞等待。
Node 双端队列节点
Node 是一个先进先出的双端队列,并且是等待队列,当多线程争用资源被阻塞时会进入此队列。这个队列是 AQS 实现多线程同步的核心。
从之前 ReentrantLock 图中可以看到,在 AQS 中有两个 Node 的指针,分别指向队列的 head 和 tail。
Node 的主要结构如下:

默认情况下,AQS 中的链表结构如下图所示:

获取锁失败后续流程分析
锁的意义就是使竞争到锁对象的线程执行同步代码,多个线程竞争锁时,竞争失败的线程需要被阻塞等待后续唤醒。那么 ReentrantLock 是如何实现让线程等待并唤醒的呢?
前面中我们提到在 ReentrantLock.lock() 阶段,在 acquire() 方法中会先后调用 tryAcquire、addWaiter、acquireQueued 这 3 个方法来处理。tryAcquire 在 ReentrantLock 中被复写并实现,如果返回 true 说明成功获取锁,就继续执行同步代码语句。可是如果 tryAcquire 返回 false,也就是当前锁对象被其他线程所持有,那么当前线程会被 AQS 如何处理呢?
「addWaiter」
首先当前获取锁失败的线程会被添加到一个等待队列的末端,具体源码如下:

有两种情况会致使插入队列失败:
-
tail 为空:说明队列从未初始化,因此需要调用 enq 方法在队列中插入一个空的 Node;
-
compareAndSetTail 失败:说明插入过程中有线程修改了此队列,因此需要调用 enq 将当前 node 重新插入到队列末端。
经过 addWaiter 方法之后,此时线程以 Node 的方式被加入到队列的末端,但是线程还没有被执行阻塞操作,真正的阻塞操作是在下面的 acquireQueued 方法中判断执行。
「acquireQueued」
在 acquireQueued 方法中并不会立即挂起该节点中的线程,因此在插入节点的过程中,之前持有锁的线程可能已经执行完毕并释放锁,所以这里使用自旋再次去尝试获取锁(不放过任何优化细节)。如果自旋操作还是没有获取到锁!那么就将该线程挂起(阻塞),该方法的源码如下:

可以看出在 shouldParkAfterFailedAcquire 方法中会判读当前线程是否应该被挂起,其代码如下:

首先获取前驱节点的 waitStatus 值,Node 中的 waitStatus 一共有 5 种取值,分别代表的意义如下:
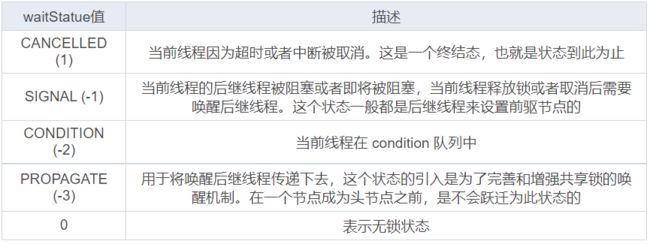
接下来根据 waitStatus 不同的值进行不同的操作,主要有以下几种情况:
-
如果 waitStatus 等于 SIGNAL,返回 true 将当前线程挂起,等待后续唤醒操作即可。
-
如果 waitStatus 大于 0 也就是 CANCLE 状态,会将此前驱节点从队列中删除,并在循环中逐步寻找下一个不是“CANCEL”状态的节点作为当前节点的前驱节点。
-
如果 waitStatus 既不是 SIGNAL 也不是 CANCEL,则将当前节点的前驱节点状态设置为 SIGNAL,这样做的好处是下一次执行 shouldParkAfterFailedAcquire 时可以直接返回 true,挂起线程。
代码再回到 acquireQueued 中,如果 shouldParkAfterFailedAcquire 返回 true 表示线程需要被挂起,那么会继续调用 parkAndCheckInterrupt 方法执行真正的阻塞线程代码,具体如下:
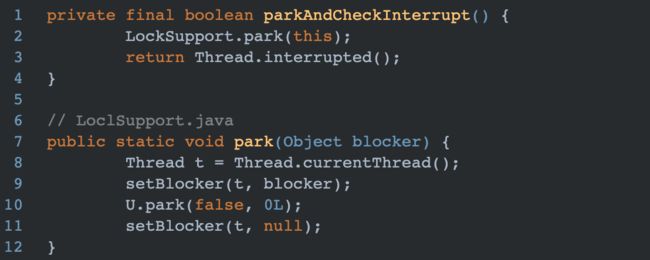
这个方法比较简单,只是调用了 LockSupport 中的 park 方法。在 LockSupport.park() 方法中调用了 Unsafe API 来执行底层 native 方法将线程挂起,代码到这已经到了操作系统的层面,没有必要再深入分析。
至此,获取锁的大体流程已经分析完毕,总结一下整个过程如下:
-
AQS 的模板方法 acquire 通过调用子类自定义实现的 tryAcquire 获取锁;
-
如果获取锁失败,通过 addWaiter 方法将线程构造成 Node 节点插入到同步队列队尾;
-
在 acquirQueued 方法中以自旋的方法尝试获取锁,如果失败则判断是否需要将当前线程阻塞,如果需要阻塞则最终执行 LockSupport(Unsafe) 中的 native API 来实现线程阻塞。
释放锁流程分析
在上面加锁阶段被阻塞的线程需要被唤醒过后才可以重新执行。那具体 AQS 是何时尝试唤醒等待队列中被阻塞的线程呢?
同加锁过程一样,释放锁需要从 ReentrantLock.unlock() 方法开始:
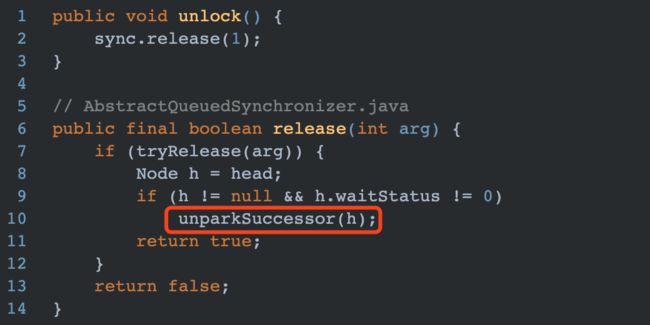
可以看出,首先调用 tryRelease 方法尝试释放锁,如果成功最终会调用 AQS 中的 unparkSuccessor 方法来实现释放锁的操作。unparkSuccessor 的具体实现如下:
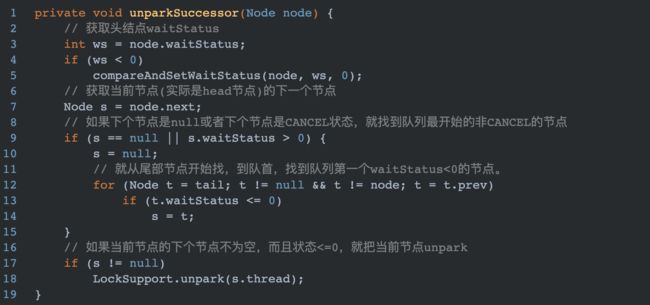
解释说明:
首先获取当前节点(实际上传入的是 head 节点)的状态,如果 head 节点的下一个节点是 null,或者下一个节点的状态为 CANCEL,则从等待队列的尾部开始遍历,直到寻找第一个 waitStatus 小于 0 的节点。
如果最终遍历到的节点不为 null,再调用 LockSupport.unpark 方法,调用底层方法唤醒线程。 至此,线程被唤醒的时机也分析完毕。
不得不说的 CAS
不管是在加锁还是释放锁阶段,多次提到了一种通用的操作:compareAndSetXXX。这种操作最终会调用 Unsafe 中的 API 进行 CAS 操作。
CAS 全称是 Compare And Swap,译为比较和替换,是一种通过硬件实现并发安全的常用技术,底层通过利用 CPU 的 CAS 指令对缓存加锁或总线加锁的方式来实现多处理器之间的原子操作。
它的实现过程主要有 3 个操作数:内存值 V,旧的预期值 E,要修改的新值 U,当且仅当预期值 E和内存值 V 相同时,才将内存值 V 修改为 U,否则什么都不做。
CAS 底层会根据操作系统和处理器的不同来选择对应的调用代码,以 Windows 和 X86 处理器为例,如果是多处理器,通过带 lock 前缀的 cmpxchg 指令对缓存加锁或总线加锁的方式来实现多处理器之间的原子操作;如果是单处理器,通过 cmpxchg 指令完成原子操作。
自定义 AQS
理解了 AQS 的设计思路,接下来我们就可以通过自定义 AQS 来实现自己的同步实现机制。
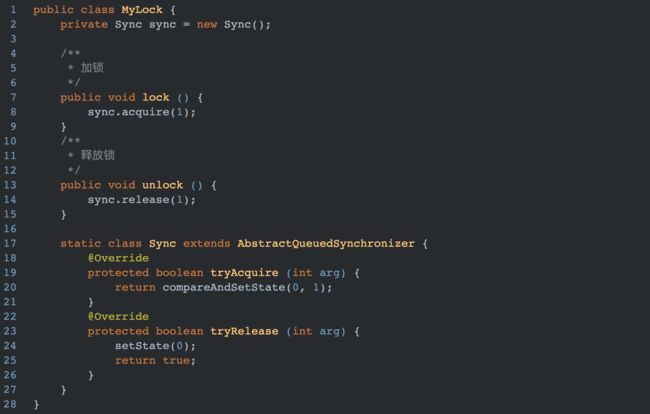
代码中的 MyLock 就是一个最简单的独占锁,通过使用 MyLock 也能实现同 synchronized 和 ReentrantLock 相同的功能。比如如下代码:
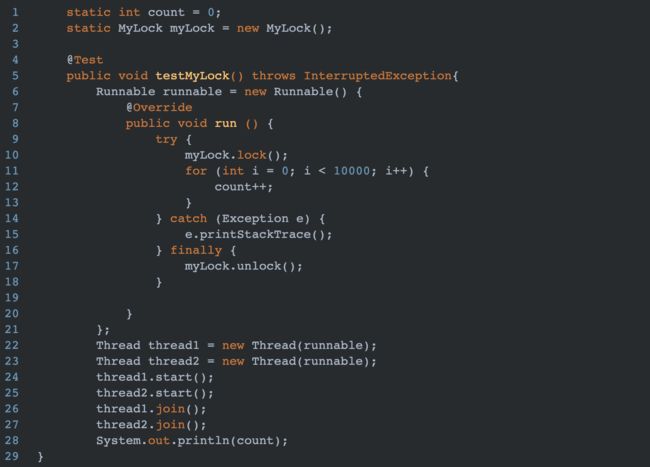
最终打印的 count 值为 20000,说明两个线程之间是线程安全的同步操作。
总结
总体来说,AQS 是一套框架,在框架内部已经封装好了大部分同步需要的逻辑,在 AQS 内部维护了一个状态指示器 state 和一个等待队列 Node,而通过 state 的操作又分为两种:独占式和共享式,这就导致 AQS 有两种不同的实现:独占锁(ReentrantLock 等)和分享锁(CountDownLatch、读写锁等)。本课时主要从独占锁的角度深入分析了 AQS 的加锁和释放锁的流程。
理解 AQS 的原理对理解 JUC 包中其他组件实现的基础有帮助,并且理解其原理才能更好的扩展其功能。上层开发人员可以基于此框架基础上进行扩展实现适合不同场景、不同功能的锁。其中几个有可能需要子类同步器实现的方法如下。
-
lock()。
-
tryAcquire(int):独占方式。尝试获取资源,成功则返回 true,失败则返回 false。
-
tryRelease(int):独占方式。尝试释放资源,成功则返回 true,失败则返回 false。
-
tryAcquireShared(int):共享方式。尝试获取资源。负数表示失败;0 表示成功,但没有剩余可用资源;正数表示成功,且有剩余资源。
-
tryReleaseShared(int):共享方式。尝试释放资源,如果释放后允许唤醒后续等待结点返回 true,否则返回 false。