CUDA并行编程
引入
并行能帮我们提高代码性能,而GPU在硬件上是能够更好地实现一些并行工作的,能够更大程度地并行。
CUDA是SIMT模型,只用写一个程序,其中就包含了CPU部分和GPU并行部分的代码,那么就需要指明哪些是CPU(一般称为HOST),哪些是在GPU上运行(一般称为device)。
device变量 对于变量,也就是数据,我们需要存放在GPU上,以便GPU端代码调用,我们没有创建特别的数据类似,而是使用指针,在分配内存时分配的是device端内存。
核函数 对于代码,如何让它在GPU上运行呢,CUDA定义了一种device函数类型,一般形式如下。如果是GPU的入口函数,也就是第一个调用的函数(其它的device函数一般在这个入口函数中调用),cuda称为核函数。
__global__ void Kernel(参数)
{
//GPU并行代码
}
核函数的调用也是不一样的。我们在main函数中这么调用它,比寻常的函数调用多了个<<<>>>,里面的参数是调用并行资源的参数,之后会提到。其中d_A, d_B此时都已经是指针,指向的是GPU中的地址(显存),而不是CPU。而n只是一个int型的,只用传形参即可,不用指针。
vecAddKernel<<<DimGrid,DimBlock>>>(d_A, d_B, d_C, n);
GPU的结构
硬件层面:GPU被分成一个个的SM(Streaming Multiprocessor计算单元),资源是以一个SM为单位的,寄存器、控制单元和缓存在SM里面都有,而一个GPU中有许多个SM,这也是GPU并行的硬件支持。其中sp就是基础的CUDA核心,用于处理线程中的指令,一个SM有多个sp。
warp :warp是cuda编程中的重要概念,一个warp是一个线程束,如今包含了32个线程。GPU最基本的调度单元不是线程,而是一个warp,也就是32个线程,多个sp会共同处理一个warp的指令。
软件层面:grid->block->thread。grid是最大的单位,包含了一个程序中所有的thread,block的意义在于一个block下的所有线程必定在同一个SM下工作,并且共享内存是以block为单位来划分的,也就是说只有一个block中的线程之间能共享内存。
在编程时,我们需要注意的就是如何划分block和thread,之前提到,在调用核函数时,就能分配一个grid中有多少block,一个block中有多少thread。如下所示,为vecAddKernel函数分配了5个block,每一个block中有256个thread,即当调用这个函数时,将会有5*256个线程并行。
vecAddKernel<<<5,256>>>(d_A, d_B, d_C, n);
3维结构:grid中的block与block中的thread是可以以2维以及3维的形式构成的。我们可以用cuda提供的dim3结构来表示。如下所示,一个grid中的block是以100502的形式排列,block中的thread是以161616的形式排列。对于这样的结构,在处理一些图像等特殊结构时能够更加清晰。
dim3 DimGrid(100, 50, 2);
dim3 DimBlock(16, 16, 16);
PictureKernel<<<DimGrid,DimBlock>>>(d_Pin, d_Pout, m, n);
地址映射:现在我们将一个10241024的矩阵中每个值平方,那么构建了一个grid是3232,block是32*32的结构,让每个线程处理一个值。
传入的是二维数组的指针和矩阵的宽1024,为什么是指针之前提到过,device变量在CUDA中用指针指向device内存,那么对于二维数组,我们其实在用一维的方式求解。
dim3 DimGrid(32, 32, 1);
dim3 DimBlock(32, 32, 1);
sqKernel<<<DimGrid,DimBlock>>>(matrix, width);
对于核函数,我们现在只知道有1024*1024个线程在工作,怎么让它们工作到对应的值,就是地址映射需要做的事情。一个块中的线程有编号,一个grid中的block也有编号,通过这些编号,我们可以对应到矩阵。
__global__ void sqKernel(int* matrix, int width)
{
int tx = threadIdx.x;//获取x方向线程号:0到31
int ty = threadIdx.y;//获取y方向线程号:0到31
int blockWidth = blockDim.x;//获取一个块在x方向宽度:32
int tid = threadIdx.y * blockDim.x + threadIdx.x;//获取一个块中全局线程号:y*width+x 0到1023
int bx = blockIdx.x;//获取x方向块号:0到31
int by = blockIdx.y;//获取y方向块号:0到31
int x = threadIdx.x + blockIdx.x*blockDim.x;//获取全局的x编号:0到1023
int y = threadIdx.y + blockIdx.y*blockDim.y;//获取全局的y编号:0到1023
int id = y * width + x;//获取全局id:y*width+x 0到1024*1024-1
//matrix[id]平方
}
最后我们通过全局id,即可对应上需要处理的值在哪个位置。
结构优化:一个SM中一般有1536个线程,已知一个block中所有线程必定在一个SM中运行,所以为了让SM中的线程全部用上,我们在设计时需要让block的线程数是1536的公约数,比如256就比较合适,或者16*16。
device变量
初始化
前文已经提到过device变量实质上是在host初始化的,用指针分配的device内存
下面是一个host二维数组的变量,大小为HEIGHT*WIDTH
int* h_A;
size_t bytesCount = HEIGHT * WIDTH * sizeof(int);
h_A = new int[bytesCount];
delete[] h_A;
下面是一个device二维数组的变量,大小也为HEIGHT*WIDTH
int* d_A;
size_t bytesCount = HEIGHT * WIDTH * sizeof(int);
cudaMalloc((void **)&d_A, bytesCount);//需要用cudaMalloc来分配内存。
cudaFree(d_A);//用cudaFree来释放内存。
可以发现其中有一个问题就是cudaMalloc使用了双重指针,这是由于cudaMalloc依旧有一个错误信息的返回值,那么如果需要将d_A修改,需要传的不是一个空壳,而是需要传地址,才能实现在函数中的变量值修改了,函数外的变量值也会改变。
所以就需要传地址,又由于传的本身就是一个指针,那么需要的是指针的地址,就是双重的void指针。
数据传递
对于一个device端的变量,d_A是不能直接在host下使用的,不能读也不能写。
那么怎么赋值,怎么接收数据,cuda中有一个函数可以做到cudaMemcpy
cudaMemcpy(d_A, h_A, bytesCount, cudaMemcpyHostToDevice);//d_A = h_A,从host拷贝到device
cudaMemcpy(h_A, d_A, bytesCount, cudaMemcpyDeviceToHost);//h_A = d_A,从device拷贝到host
此时已经明白了一个基本的cuda结构,可以去看一看文章最后的第一个矩阵加法是如何实现的。
共享内存与矩阵乘法
引入
我们直接用cudaMalloc创建的是位于global memory全局内存上的,最基本、容量最大,也是最慢的一个存储位置,share memory是比全局内存要快很多的,但缺点就是很小。
并且共享变量是在和函数上声明的,所以可以直接用二维数组,而不是一维转二维。
对于普通的矩阵乘法,在核函数中,我们可以直接将该线程对应的一整行和一整列都读取上来, 然后相乘相加,如下所示。
float Pvalue = 0;
// each thread computes one element of the block sub-matrix
for (int k = 0; k < Width; ++k) {
Pvalue += M[y*Width+k]*N[k*Width+x];
}
P[y*Width+x] = Pvalue;
但是(0,0)线程和(0,1)线程都要读取第0行,分别与第一列和第二列相乘,显然重复读取了第0行。
于是定义了一个共享内存,想要直接先读取所有需要的数据到共享内存中,然后再通过共享内存计算。
//kernel假设块大小是16*16,矩阵是1024*1024,那么M需要16*1024的数据,N需要1024*16的数据。
__shared__ float ds_M[16][1024];//共享变量用__shared__修饰
__shared__ float ds_N[1024][16];
//...省略中间读取到共享内存部分.
for (int k = 0; k < Width; ++k) {
Pvalue += ds_M[y*Width+k]*ds_N[k*Width+x];
}
但是共享内存是很小的,只能放很小的一部分。
算法
所以我们成几个部分读取,分块的大小为TILE_WIDTH,一般与块大小一致,所以这是也是16,如果是32也是没有问题的。
//
__shared__ float ds_M[16][TILE_WIDTH];//共享变量用__shared__修饰
__shared__ float ds_N[TILE_WIDTH][16];
那么现在就需要一个块一个块的读取,M矩阵向X方向读取,N向y方向读取
比如线程是(0,1),那么M矩阵,读取的就是M[0, 0tilewidth+1], [0, 1tilewidth+1]…,那么线程(0,1)到(31,1)并行下,就能将第一列的所有数据读取进来。
N矩阵读取的就是N[0+tilewidth0, 1], N[0+tilewidth1, 1], N[0 + 16*tilewidth, 1]
写成代码就是
for (int p = 0; p < n/TILE_WIDTH; ++p) {//p代表的就是现在到第几个块了。
ds_M[ty][tx] = M[y * width + p*TILE_WIDTH+tx];
ds_N[ty][tx] = N[(p * TILE_WIDTH+ty)*width+ x];
__syncthreads();//所有线程都读取完了第P块
//然后就将这一块的结果暂存起来
for (int i = 0; i < TILE_WIDTH; ++i)Pvalue += ds_M[ty][i] * ds_N[i][tx];
__synchthreads();//等所有线程都计算完了这一个块再进行下一个块。
}
P[Row*Width+Col] = Pvalue;//最后所有块都执行完毕
一块一块的读取一块一块的计算。
还有一个问题没有提到就是边界处理,假如矩阵不是刚好1024而是1023,那么有些线程就需要进行边界处理。用if判断一下即可, 具体处理方式可见最后完整代码。
control divergence
已知GPU调度的基本调度单位是warp,一个warp有32个线程,一个warp的线程一般都在一个块里面按照顺序的。
比如现在有(16*16)个线程在一个块里面,那么第(0,0)线程到(1,15)号线程就是一个warp,所以块一般是32的倍数。
而这一个warp假如工作内容是不同的,就会降低效率,本来一批的东西被分成多批,而不同warp本来就是不同批次。
我们称这种降低效率的情况叫control divergence
比如下面0到4干的活就与5到31干的事不一样。
if(tid < 5){
printf("1");
}
假如我们改成下面就不会有这种问题。
if(tid < 32){
printf("1");
}
原子操作与直方图
引入
现在的案例是有一串很长的英文字母,agfweifowjfei这样的,现在需要统计a到g的字母有多少个,g到o的字母有多少,以此类推
字符串已经长到我们不能让一个线程对应一个字母,所以我们还是需要分成多个部分。比如有102400个字母,分成1024个线程,一个线程处理100个字母。
那么第1个线程处理前100个,第二个处理第二批100个,实际上是这样吗?不是的,由于局部性原理,即假如缓存没有需要的数据,会将附近的数据读入到缓存中,所以我们在编程序时最好将要处理的数据放在一起。
现在的做法是第一个线程在处理第1个字母时,第二个线程在处理第101个,不能很好地利用缓存机制。
__global__ void histo_kernel(unsigned char *buffer, long size, unsigned int *histo)
{
int i = threadIdx.x + blockIdx.x * blockDim.x;
// stride就是每一次处理多少字母,等于grid中所有线程。
int stride = blockDim.x * gridDim.x;
while (i < size)
{
int alphabet_position = buffer[i] - 'a';
if (alphabet_position >= 0 && alphabet_position < 26)
atomicAdd(&(histo[alphabet_position / 4]), 1);
i += stride;
}
}
可以看到上面的代码处理的就是相近的数据,通过stride步长来定位到第n次批次,比如现在线程全局id是i,第5次处理,那么对应的字母就是buffer[5*stride+i];
其中有一个新的函数atomicAdd(),这个函数是原子操作,如果多个线程同时对一个类别进行加,就可能造成竞争,所以这个加法操作就是临界区
为了防止多线程对一个变量同时操作,cuda使用原子操作来处理这种情况。
int atomic(int * address, int val)这个函数有多个重构,可以处理int, unsigned int, unsigned long long , float。其返回值是原子操作之前的旧值,新值通过指针已经放在变量中了。
同样,可以看后文的完整代码。
共享直方图算法
对于一个算法在一步步地向后计算的途中,对于buffer每次读取的位置是不同的,无法优化,但是histo却只有7个,多次重复读取,所以可以使用共享内存。
可以在一个块中放一个共享的私有的histo,用来作为中转暂存,等将所有字母统计完毕,将私有的histo再汇集到全局的histo上。
大致代码如下, 完整代码附在后文,前7个线程同时负责私有histo的初始化和汇集,不可避免地有control divergence
__global__ void histo_kernel(unsigned char *buffer, long size, unsigned int *histo)
{
__shared__ unsigned int histo_private[7];
// 初始化值共享内存为0;
if (threadIdx.x < 7)
histo_private[threadIdx.x] = 0;
__syncthreads();
while (i < size)
{
atomicAdd(&(histo_private[alphabet_position / 4]), 1);
i += stride;
}
// 等待所有线程执行完毕
__syncthreads();
if (threadIdx.x < 7)
{
atomicAdd(&(histo[threadIdx.x]), histo_private[threadIdx.x]);
}
}
卷积计算
引入
cuda并行也非常适合卷积计算。
卷积:一个图像有一个卷积核和一个输入数组,卷积核的大小一般比输入数组小很多。比如输入数组是一个2维的图像像素,10241024,那么卷积核可能是33,对于每一个像素点,卷积核将先将自己矩阵转置,再取周围3*3的像素点,与自身进行一定操作,最后得到的值就是这个像素点新的值。
卷积核:之前提到卷积核在进行卷积的时候需要先将自己进行转置,所以对称的卷积核方便操作。
例子:现在一维数组nums={1234567},卷积核为M={34543},现在需要对nums[2]进行卷积操作了,那么长度为5的卷积核将取以nums[2]为中心左右两边的数进行操作,最后新的nums[2] = nums[0]*M[0]+nums[1]*M[1]+nums[2]*M[2]+nums[3]*M[3]+nums[4]*M[4]=57
幽灵元素:假如上面例子中,轮到nums[0]进行卷积,左边已经没有元素,那么就直接补0,称为幽灵元素。
那么在写核函数的时候,只需要注意当前从哪个地方开始乘即可。
int start_point = i – (Mask_Width/2);//2为中心,即2 - 5 / 2 = 0,从0开始积和。
对于2d的卷积函数也是如此。
int N_start_col = Col - (maskwidth / 2);
int N_start_row = Row - (maskwidth / 2);
如果想要看完整代码附在后文。
共享内存卷积
与矩阵乘法共享类似,卷积也是在计算本像素点数值时需要其它像素点的数值,所以可以用类似的思想,将共用的地方用共享内存先读取。
与矩阵乘法不同的是,卷积需要多处理块的边界问题,比如现在一个块16*16大小,那么在块中第0号线程和第255号线程在进行读取时很有可能无法读取到周围块的元素。
接下来介绍的算法将共享内存=block大小>计算大小,就是需要计算的实际上比block线程小一圈,这样就能读取到周围的元素。
#define O_TILE_WIDTH 12//块大小是16*16,mask大小为5*5,那么12*12就是实际读取的大小
#define BLOCK_WIDTH 16
那么这个时候全局的x和全局的y已经不能和需要计算的xy对应起来了,这个时候一个很巧妙的做法就是直接想象块的大小就是12*12,而不是16,在计算地址的时候按照O_TILE_WIDTH 16来计算。
__shared__ int Ns[BLOCK_WIDTH][BLOCK_WIDTH];//16*16的共享内存
int row_o = blockIdx.y * O_TILE_WIDTH + ty;
int col_o = blockIdx.x * O_TILE_WIDTH + tx;
int row_i = row_o - 2;//输入地址的映射不变,照常-2,不过之前是y和x,现在是row_o
int col_i = col_o - 2;
由于读取时需要所有线程都工作,所以我们不必加什么限制,比如现在是第0块,那么o就是0到11,读取时就是-2到13,到第二块的时候输出index就是1*12+tx,就是12到23,读取的index就是12-2到12-2+16,完美对应。
if ((row_i >= 0) && (row_i < height) && (col_i >= 0) && (col_i < width))
{
Ns[ty][tx] = in[row_i * width + col_i];
}
else
{
Ns[ty][tx] = 0;
}
接下来的重要一环就是计算,首先只需要1212参与计算,这里选择了前面的1212个线程
不是选择中间的12*12那么就有一个问题就是当线程是0,0的时候,中心点其实在2,2,所以需要计算的是00到44与mask的00到44
int value = 0;
if (ty < O_TILE_WIDTH && tx < O_TILE_WIDTH)
{
for (int i = 0; i < maskwidth; i++)
{
for (int j = 0; j < maskwidth; j++)
{
value += mask[i * width + j] * Ns[i + ty][j + tx];
}
}
}
restrict
对于只读的指针,我们可以通过__restrict__来修饰
如const int * __ restrict__ M
reduction规约
simple
规约和扫描都是cuda并行的计算模式。
现在是一个规约的例子,为了求一个矩阵每一行的和。直接用共享内存
reduction就是多个数逐渐减少,最后汇聚到一个变量上,这里的代码就是用一个块计算的是两个块大小的数,为了一个块计算一个数,所以一个块有512个线程,共1024个块,那么前512个线程就是第一行。
__global__ void rowSum(int *input, int *output, int width)
{
__shared__ int partialSum[2 * BLOCK_SIZE];//共享内存大小是block的两倍,1024
unsigned int tx = threadIdx.x;
unsigned int start = blockIdx.x * 2 * blockDim.x;//块为0的时候,start=512,第一个块就读取了1024个数据。
partialSum[tx] = input[start + tx];//一个线程负责读取两个数据。
partialSum[blockDim.x + tx] = input[start + blockDim.x + tx];
}
一个块用一个stride,每次翻倍,通过tx % stride == 0。然后通过2*tx就能定位到,为什么是2倍就是因为共享内存是两倍。
stride=1的时候,就是(0,1), (2, 3), (4,5)
stride=2的时候,就是(0,2),(4, 6), (8, 10)
stride=512的时候,就是(0, 512)
// reduce
for (unsigned int stride = 1; stride <= blockDim.x; stride *= 2)
{
__syncthreads();
if (tx % stride == 0)
{
partialSum[2 * tx] += partialSum[2 * tx + stride];
}
}
// 将最后的结果存放到
if (tx == 0)
{
output[blockIdx.x] = partialSum[0];
}
better
前一个版本的在运行到后面的时候,运行的线程分布很开,不仅有control divergence而且不能很好地利用缓存。
下面的版本就是将原本stride从小到大改成了从大到小。
for (unsigned int stride = blockDim.x;stride > 0; stride /= 2)
{
__syncthreads();
if (t < stride)
partialSum[t] += partialSum[t+stride];
}
现在比如一个block有1024个线程,那么在stride到32之前,都没有divergence,只有到16,8之后才会有。
scan扫描
work_inefficient
scan扫描的一个例子就是计算前缀和。现在有一个二维矩阵,需要计算其前缀和,那么我们首先需要计算每一行的前缀和。
下面就是每一行计算前缀和的代码,所以我们现在一个块的大小就是一行的大小,读取就是一一对应到一个共享内存中。
然后是迭代扫描计算,inefficient的扫描就是每次获取stide2的数据,比如现在是stride=8,那么tid=17的时候,获取的是28个数据,2到17的和。
stride = 1的时候0:0, 1:01, 2:12, 3:23, 4:34, 5:45, 6:56…
stride = 2的时候0:0, 1:01, 2:2+0=012, 3:1+3=0123, 4:2+4=1234, 5:5+3=2345
stride = 4的时候0:0, 1:01, 2:012, 3:0123, 4:1234, 5:5+1=012345
__global__ void work_inefficient_scan_kernel(int *inputMatrix, int *output, int width)
{
__shared__ int XY[SECTION_SIZE];
int tid = threadIdx.x; // 线程内的局部id
int i = blockIdx.x * blockDim.x + tid; // 全局id
if (i < width * width)
{
XY[tid] = inputMatrix[i] * inputMatrix[i];
}
// 执行迭代扫描
for (unsigned int stride = 1; stride <= blockDim.x; stride *= 2)
{
__syncthreads();
int in1 = 0;
if (tid >= stride)
{
in1 = XY[tid - stride];
}
__syncthreads();
XY[tid] += in1;
}
__syncthreads();
if (i < width * width)
{
output[i] = XY[tid];
}
}
最后的效率是O(N* log2(N)) ,这串代码可能会在执行资源饱和的情况下,效率低于串行。
work_efficient
首先我们可以用之前的思想,一个块读取两个块的数据
#define BLOCK_SIZE 512
#define SECTION_SIZE 1024
__shared__ int XY[SECTION_SIZE];
unsigned int tx = threadIdx.x;
unsigned int start = blockIdx.x * 2 * blockDim.x;
XY[tx] = inputMatrix[start + tx];
XY[blockDim.x + tx] = inputMatrix[start + blockDim.x + tx];
这是用到了二叉树的思想,首先将子节点的值都聚集到身上。
for (unsigned int stride = 1; stride <= blockDim.x; stride *= 2)
{
__syncthreads();
int index = (threadIdx.x + 1) * 2 * stride - 1;
if (index < SECTION_SIZE)
{
XY[index] += XY[index - stride];
}
}
下面的从根开始遍历,第一个index的值就是第一层节点,让第一层节点和右边的第二层节点相加,形成新的第一层节点

到步长为1的时候,就轮到叶子节点了,叶子节点与之前已经得到的前缀根相加,叶子节点就也能存储前缀和。

代码如下
for (int stride = blockDim.x / 2; stride > 0; stride /= 2)
{
__syncthreads();
int index = (threadIdx.x + 1) * stride * 2 - 1;
if (index + stride < SECTION_SIZE)
{
XY[index + stride] += XY[index];
}
}
最后的时间复杂度差不多是O(log2(N)*log2(N)),并且更节省资源。
完整代码附在后文。
稀疏矩阵
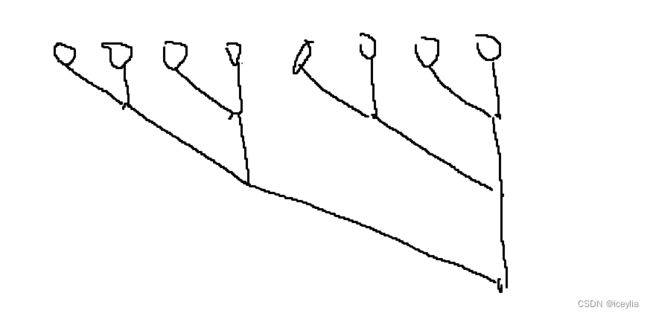
下面是一个例子,当然这个矩阵不够大,零也不够多,只是方便学习。现在需要nn的稀疏矩阵与n1的矩阵X相乘
对于这种乘法,我们不需要关注零,只需要将第一行的非零元素与矩阵X对应位置相乘相加就是第一个值。
CSR
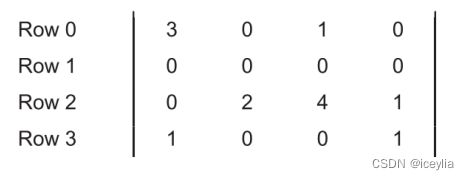
通过三个数组来存储稀疏矩阵,第一个数组data存放非零元素,可能就是data[7]={3,1,2,4,1,1,1}
第二个数组col_index对应的是上一个数组元素对应的列,col_index[7] = {0,2,1,2,3,0,3}
第三个数组用来存放行的信息,比如data的第一行元素data[0]和data[1],第二行没有,第三行是2到4,那么row_ptr={0,2,2,5,7}
CSR能不能做到随机读取,就是我想读到哪一行就读哪一行,而不需要遍历,显然是可以的,但是不能直接定位到列,只能定位到行。
比如我读取ROW 2的代码如下
for(int index = row_ptr[2]; index<row_ptr[3]; index++){
int col = col_index[index];//对应原本矩阵的坐标就是(2, col),值是value
int value = data[index];
}
那么如何将稀疏矩阵乘法并行化就很清晰了, 每一个线程处理一行。
int temp = 0;
int row = blockIdx.x * blockDim.x + threadIdx.x;
for(int index = row_ptr[row]; index<row_ptr[row+1]; index++){
int col = col_index[index];//对应原本矩阵的坐标就是(row, col),值是value
temp += data[index] * X[col];
}
但是很显然,当稀疏矩阵一些行有特别多的非零元素,与一些行全是零的时候,其对应的线程就会出现负载不均衡的情况
并且control divergence的现象严重。
ELL
首先将进行压缩,将有最多非零元素的那一行作为矩阵的宽,非零元素全部向左边靠,列信息保留。

这样我们就知道一行是3个元素,然后遍历3次就可以处理完一行的数据。
但还有一个问题就是当多个线程都在处理一行的第一个元素的时候,没有很好利用缓存。
所以我们在存储values时,可以采用列优先的方式。321, 141,*1,对应的列坐标也是一样010,223,*3.
最后计算
__global__ void SpMV_ELL(int num_rows, float *data, int *col_index, int num_elem, float *x, float *y)
{
int row = blockIdx.x * blockDim.x + threadIdx.x;
int temp = 0;
if (row < num_rows) {//不要超过行数
for (int i = 0; i < num_elem; i++) {
col = col_index[row+i*num_rows];
temp += data[row+i*num_rows] * X[col];//所以在计算data坐标和col时,用的是row+i*num_rows,将行优先的行列坐标转成列优先坐标
}
}
这个方案也有缺点,就是当你某一行的非零元素特别多的时候,需要很多存储空间,极端的就是某一行一个零没有,就是原本矩阵了, 没有压缩一点。
COO
这种压缩矩阵的模式是将每个非零元素对应的行和列都用数组储存,
缺点是当你用这种方式存储时,无法直接得到它们位置上的对应关系,比如哪些数据是在同一行。
所以一般我们是将coo与其它的方式结合起来, 用以减少其存储空间。
比如将ell和coo结合起来。
将ell中非零元素多的那几列用coo存储,比如上面的案例中,将第三列的1用coo单独存储,就是
data = 1, rowindex = 2, colindex = 3,那么coo的存储数组中只有2列,断了一截
//ell
for (i = 0; i < num_rows_ell; i++) {//此时num_rows = 2
int col = col_index_ell[row + i * num_rows];
value += data_ell[row+i*num_rows] * x[col];
}
//COO
for (i = 0; i < num_elem_coo; i++) {
if (row_index_coo[i] == row) {//遍历coo中的所有元素,看哪个是在这一行里面的。
dot += data_coo[i] * x[col_index_coo[i]];
}
}
JDS
最后还有一种就是JDS模式,在ELL的基础上进行行变换,按照长度从长到短排列
存储方式采用的CSR的数组存储,只不过需要多一个行的数组。现在的行数组就是row_index={2,0,3,1}row2是最长的,所以放到第一行了。
data数组和col数组也是,不同的是rowptr存储不是行从哪到哪,而是改成了部分,相同非零元素的是同一部分,row0和row3就是一部分,而row1由于没有元素,这个部分就不参与计算。
每一部分单独有一个核函数进行
merge sort
merge sort就是将两个已经排好序的数组合成一个数组,听起来应该是顺序执行的。
如果我们将原本两个数组叫做AB,第三个数组叫做C,那么假如以9为块,前9个用一个线程跑,后9个用一个线程跑。
但问题在于,现在你知道C需要9个数,那么多少来源于A,多少来源于B呢。
这个计算多少数据来源于A是能求出来的,将这个函数称作co_rank

其中k是指需要从A和B中取K个数,m是A的长度,n是B的长度,最后返回的i是说从A中取i个数,即0到i-1。
那么从B中取多少个数就等于k-i
__global__ void merge_basic_kernel(int* A, int m, int* B, int n, int* C){
int id= blockIdx.x*blockDim.x + threadIdx.x;
// 一个线程处理一部分,这一部分就是m+n/所有线程数
int k_curr = id*ceil((m+n)/(blockDim.x*gridDim.x);
int k_next = min((id+1) * ceil((m+n)/(blockDim.x*gridDim.x)), m+n);
int i_curr= co_rank(k_curr, A, m, B, n);
// 执行两遍co_rank就能获取到需要从哪到哪
int i_next = co_rank(k_next, A, m, B, n);
int j_curr = k_curr -i_curr;
int j_next = k_next-i_next;
/* 知道这些信息后就能执行 */
merge_sequential(&A[i_curr], i_next-i_curr, &B[j_curr], j_next-j_curr,
&C[k_curr] );
}
完整代码实例:矩阵加法
两矩阵相加,实现2个矩阵(Width=2048, Height=1024)的相加
这个代码就是需要注意height是矩阵中的行,width是列,在计算全局id的时候需要用y*width + x
c++代码
#include cuda代码
#include
#include
#include
#include
using namespace std;
int HEIGHT = 1024, WIDTH = 2048;
__global__ void matrix_addition(int *A, int *B, int *C, const int height, const int width)
{
const int x = blockIdx.x * blockDim.x + threadIdx.x;
const int y = blockIdx.y * blockDim.y + threadIdx.y;
const int id = y * width + x;
if (x < width && y < height)
{
C[id] = A[id] + B[id];
}
}
int main(void)
{
float elapsedTime;
cudaEvent_t start, stop;
// 初始化 CUDA 事件
cudaEventCreate(&start);
cudaEventCreate(&stop);
// 记录开始事件
cudaEventRecord(start, 0);
int *h_A, *h_B, *h_C;
int *d_A, *d_B, *d_C;
size_t bytesCount = HEIGHT * WIDTH * sizeof(int);
h_A = new int[bytesCount];
h_B = new int[bytesCount];
h_C = new int[bytesCount];
// 初始化输入矩阵
for (int i = 0; i < HEIGHT; i++)
{
for (int j = 0; j < WIDTH; j++)
{
h_A[i * WIDTH + j] = 4;
h_B[i * WIDTH + j] = 2;
}
}
// 分配设备内存,将数据从主机复制到设备
cudaMalloc((void **)&d_A, bytesCount);
cudaMalloc((void **)&d_B, bytesCount);
cudaMalloc((void **)&d_C, bytesCount);
cudaMemcpy(d_A, h_A, bytesCount, cudaMemcpyHostToDevice);
cudaMemcpy(d_B, h_B, bytesCount, cudaMemcpyHostToDevice);
// 核函数计算
dim3 block(32, 32);
dim3 grid(64, 32);
matrix_addition<<>>(d_A, d_B, d_C, HEIGHT, WIDTH);
// 记录结束事件
cudaEventRecord(stop, 0);
// 同步事件,确保所有任务完成
cudaEventSynchronize(stop);
// 计算经过的时间
cudaEventElapsedTime(&elapsedTime, start, stop);
// 将数据从设备复制回主机
cudaMemcpy(h_C, d_C, bytesCount, cudaMemcpyDeviceToHost);
// 输出结果
for (int i = 0; i < HEIGHT; i++)
{
for (int j = 0; j < WIDTH; j++)
{
printf("%d ", h_C[i * WIDTH + j]);
}
printf("\n");
}
// 输出时间
printf("Elapsed time: %3.1f ms\n", elapsedTime);
// 销毁事件
cudaEventDestroy(start);
cudaEventDestroy(stop);
// 释放内存
delete[] h_A;
delete[] h_B;
delete[] h_C;
cudaFree(d_A);
cudaFree(d_B);
cudaFree(d_C);
cudaDeviceReset();
return 0;
}
完整代码实例:用块并行计算矩阵乘法
#include 完整代码实例:一般的直方图统计字母频率
#include 完整代码实例:共享内存的直方图
#include 完整代码实例:2D卷积模板计算
#include 完整代码实例:共享内存的卷积模板计算
#include 完整代码实例:better版规约
#include 完整代码实例:work_efficient二维前缀和scan
#include 各种报错
the provided ptx was compiled with an unsupported toolchain
这是说你的工具链有问题,就是Cuda和Cuda toolkit和你的Gpu driver有一个对不上,当然说的就是你的gpu驱动没有跟上其它两个工具,所以更新即可。