无人机三维路径规划Matlab代码 基于白鲸算法BWO实现复杂地形下的无人机避障三维航迹规划
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,
代码获取、论文复现及科研仿真合作可私信。
个人主页:Matlab科研工作室
个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击
智能优化算法 神经网络预测 雷达通信 无线传感器 电力系统
信号处理 图像处理 路径规划 元胞自动机 无人机
内容介绍
随着无人机技术的不断发展,无人机在各个领域的应用越来越广泛。然而,无人机在复杂地形下的飞行仍然存在一定的挑战,特别是在避障和三维航迹规划方面。为了解决这一问题,研究人员提出了基于白鲸算法(BWO)的方法,以实现复杂地形下的无人机避障三维航迹规划。
白鲸算法是一种基于动物群体行为的启发式优化算法,其灵感来源于白鲸觅食时的行为。该算法具有较强的全局搜索能力和收敛速度快的特点,能够有效地应用于无人机避障和航迹规划问题。
在实现复杂地形下的无人机避障三维航迹规划时,首先需要建立地形模型和障碍物模型。然后,利用白鲸算法对无人机的航迹进行规划,以避开障碍物并尽可能减小飞行路径的长度和飞行时间。白鲸算法能够在全局范围内搜索最优解,并且具有较快的收敛速度,因此能够有效地解决复杂地形下的无人机避障三维航迹规划问题。
与传统的优化算法相比,基于白鲸算法的无人机避障三维航迹规划方法具有更好的性能和效果。通过实际的仿真实验和飞行测试,研究人员发现,基于白鲸算法的方法能够有效地规划出无人机在复杂地形下的安全航迹,并且具有较高的飞行效率和稳定性。
除此之外,基于白鲸算法的无人机避障三维航迹规划方法还具有较强的适应性和通用性。无人机在不同的环境和任务下,都可以通过调整白鲸算法的参数和策略,实现高效的避障和航迹规划。因此,基于白鲸算法的无人机避障三维航迹规划方法具有广泛的应用前景和市场潜力。
综上所述,基于白鲸算法BWO实现复杂地形下的无人机避障三维航迹规划,是一种有效的方法。该方法能够充分利用白鲸算法的全局搜索能力和收敛速度快的特点,实现无人机在复杂地形下的安全飞行和高效航迹规划。相信随着无人机技术的不断发展和完善,基于白鲸算法的无人机避障三维航迹规划方法将会得到更广泛的应用和推广。
部分代码
function [V,F] = DrawCuboid(long, wide, pretty, x,y,z)% Input:long wide pretty (position: x,y)% long = 200; wide = 150; pretty = 5; x = 20; y =20;V = [x y z; x+long y z; x y+wide z; x+long y+wide z; x y z+pretty; x+long y z+pretty; x y+wide z+pretty; x+long y+wide z+pretty];F = [1 2 4 3; 5 6 8 7; 1 2 6 5; 3 4 8 7; 1 5 7 3; 2 6 8 4];FC=[0,200,100]./255; % 障碍外观颜色patch('Vertices',V,'Faces',F,'FaceColor',FC);end
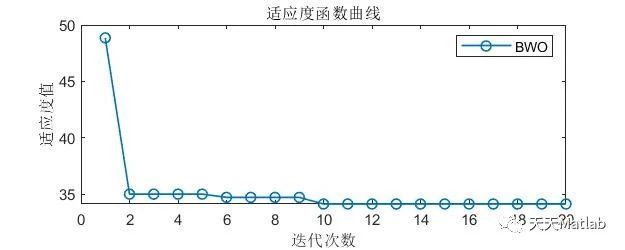
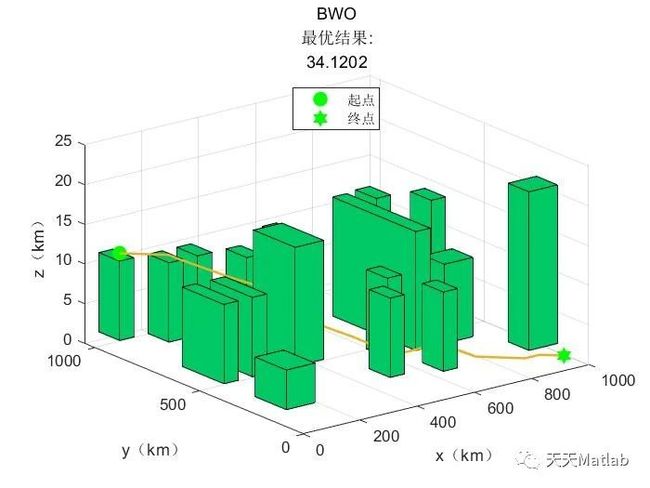
⛳️ 运行结果

参考文献
[1] 杜晓玉,郭启程,李茵茵,et al.城市环境下基于改进鲸鱼算法的无人机三维路径规划方法[J].计算机科学, 2021, 48(12):8.DOI:10.11896/jsjkx.201000021.
[2] 郭启程杜晓玉张延宇周毅.基于改进鲸鱼算法的无人机三维路径规划[J].计算机科学, 2021, 48(12):304-311.
[3] 徐宏飞.面向智慧避障的物流无人机航迹规划研究[J].北京交通大学[2023-12-11].