- 关于XSS的一点理解
「已注销」
XSS
什么是XSS攻击XSS,缩写自Cross-SiteScripting,即跨站脚本攻击,是一种注入型攻击方法,也就是攻击者把恶意脚本注入到良性和可信任的网站中。XSS攻击者通常会利用Web应用(通常在浏览器端脚本的form中)发送恶意代码给其他的Web应用用户。XSS的攻击原理就是攻击者使用XSS发送一些恶意的脚本代码给一些未防备的用户,这些用户的浏览器没办法分辨出这些脚本是否应该被信任,并且会完整
- 前端安全指南:防御XSS与CSRF攻击
天天进步2015
前端开发前端安全xss
引言随着互联网的快速发展,Web应用安全问题日益突出。作为前端开发者,了解常见的安全威胁及其防御措施至关重要。本文将重点介绍两种最常见的前端安全威胁:跨站脚本攻击(XSS)和跨站请求伪造(CSRF),并提供实用的防御策略。XSS攻击解析什么是XSS攻击?XSS(Cross-SiteScripting,跨站脚本)攻击是一种注入类型的攻击,攻击者通过在目标网站上注入恶意脚本代码,当用户浏览该页面时,恶
- C#8.0—非空引用类型
weixin_30642267
c#
C#8.0—非空引用类型原文:C#8.0—非空引用类型非空引用类型——C#8.0原文地址:https://devblogs.microsoft.com/dotnet/try-out-nullable-reference-types/?utm_source=vs_developer_news&utm_medium=referral该新增的特性最关键的作用是处理泛型和更高级API的使用场景。这些都是我
- 学习笔记(66):Python入门教程-datetime模块时间运算
顾子宇
研发管理python编程语言Python小猿圈Python入门教程
立即学习:https://edu.csdn.net/course/play/24459/296363?utm_source=blogtoedudatetime模块:datetime.date:表示日期的类,常用属性有year,month,daydatetime.time:表示时间的类,常用的属性有hour,minute,second,microseconddatetime.datetime:表示日
- 【网络安全】XSS漏洞- XSS基础概述及利用
SUGERBOOM
网络安全web安全xss安全
本章讲解XSS漏洞的基础理论和漏洞利用。主要包含三个方面:跨站脚本攻击漏洞概述、跨站脚本攻击漏洞类型及场景、跨站脚本攻击漏洞实操一、跨站脚本攻击漏洞概述1.1定义跨站脚本(Cross-siteScripting)攻击,攻击者通过网站注入点注入客户端可执行解析的payload(脚本代码),当用户访问网页时,恶意payload自动加载并执行,以达到攻击者目的(窃取cookie、恶意传播、钓鱼欺骗等)为
- Spring AOP(面向切面编程,Aspect-Oriented Programming)
SpringAOP(面向切面编程,Aspect-OrientedProgramming)一、SpringAOP是什么?SpringAOP是Spring框架提供的面向切面编程支持,用于将横切关注点(cross-cuttingconcerns,如日志、事务、权限检查等)与核心业务逻辑分离。AOP允许开发者通过声明式方式将通用功能模块化,减少代码重复,提高代码可维护性。核心概念Aspect(切面):切面
- 051-OpenCV GrabCut图像分割算法
话不多说,上代码,看结果。importcv2#导入库importnumpyasnp'''cv2.imread(filename,flags)#filename为文件名,图片与.py文件在一个文件夹时输入文件名即可#不在一个文件夹时输入图片的路径和名字#flags为图片的颜色类型,默认为1,灰度图像为0'''img=cv2.imread('89.jpg')mask=np.zeros(img.shap
- windows下jar包配置为开机自启动
在jar包目录新建一个start.bat文件,然后写入启动命令java-jarX.jar2.仍然在此目录,新建start.vbs文件,然后写入一下命令,命令最后一个0是隐藏窗口运行createobject("wscript.shell").run"D:\start.bat",03.创建run.vbs的快捷方式,移动到开机自启动目录下:C:\ProgramData\Microsoft\Windows
- golang的编译过程分析
转载自:https://halfrost.com/go_command/引言Go语言这两年在语言排行榜上的上升势头非常猛,Go语言虽然是静态编译型语言,但是它却拥有脚本化的语法,支持多种编程范式(函数式和面向对象)。Go语言最最吸引人的地方可能是其原生支持并发编程(语言层面原生支持和通过第三方库支持是有很大区别的)。Go语言的对网络通信、并发和并行编程的支持度极高,从而可以更好地利用大量的分布式和
- 考研英语语法_Day04_定语从句
一、什么是定语?只要听到"…的+名词","…的"就是修饰这个名词的定语。二、定语的成分1、形容词修饰名词2、名词修饰名词(第二个名词+of+第一个名词)3、介词短语作定语4、非谓语动词作定语5、从句修饰名词6、形容词性物主代词举个栗子:Eg1:Theinnocentnightingaledied.Eg2:Thesingingofthenightingalecanmaketherosebloom.E
- Failed to fetch http://packages.ros.org.ros/ubuntu/dists/xenial/InRelease
尝试了将地址修改成http://packages.ros.org/ros/ubuntu/dists/xenial/InRelease,更差;尝试了sudorm-f/etc/apt/sources.list.d/ros-latest.list/binary-amd64/Packages不建议这么做。过了一阵子,自己好了!!!!总结:查看自己网络连接,或者等一会再update,自己就好了。
- HKUST-Aerial-Robotics/VINS-Mono 测试过程中遇到的问题
Kris_u
Linuxlinux
ubuntu18.041、sudoapt-getupdate失败:GPGerror:http://packages.ros.org/ros/ubuntubionicInRelease:详细错误信息:Thefollowingsignatureswereinvalid:EXPKEYSIGF42ED6FBAB17C654OpenRoboticsW:Failedtofetchhttp://packages
- sudo apt-get update报错:GPG 错误:http://packages.ros.org/ros/ubuntu bionic InRelease: 下列签名无效: EXPKEYSIG
黄小白的进阶之路
Ubuntuubuntu
错误:hjs@hjs:~$sudoapt-getupdate命中:1http://mirrors.aliyun.com/ubuntubionicInRelease命中:2http://mirrors.aliyun.com/ubuntubionic-updatesInRelease命中:3http://mirrors.aliyun.com/ubuntubionic-backportsInReleas
- ROS2 视频采集节点实现
ZPC8210
ROS音视频
一个完整的ROS2视频采集节点的实现,使用OpenCV进行视频捕获并通过ROS2发布图像消息。1.创建功能包首先创建一个新的ROS2功能包(如果还没有):bashros2pkgcreatevideo_capture--build-typeament_python--dependenciesrclpysensor_msgscv_bridgeopencv-python2.实现视频采集节点在video_
- ROS2 通过相机确定物品坐标位置
要实现通过相机确定物品坐标位置,通常需要相机标定、物体检测和坐标转换几个步骤。下面我将提供一个完整的解决方案,包括相机标定、物体检测和3D坐标估计。1.系统架构相机标定-获取相机内参和畸变系数物体检测-使用OpenCV或深度学习模型检测物品坐标转换-将2D图像坐标转换为3D世界坐标ROS2集成-将上述功能集成到ROS2节点中2.实现步骤2.1创建功能包bashros2pkgcreateobject
- HAProxy实现负载均衡及高可用集群(corosync+pacemaker
}}}else{echo“Invalidfile”;}?>注意:需要重启httpd **测试:** 安装到D盘,而不是默认安装到C盘的%LOCALAPPDATA%路径,可以使用以下方法:✅一、图形界面安装(如MicrosoftStore)不能指定安装路径默认会安装到:C:\Users\\AppData\Local\Packages\所以,如果你希望初始就安装到D盘,必须使用命令行的导入安装方式⬇️二、初始安装WSL子系统到D盘的方法✅步骤概览:下载.a
- 微软官方MSDN原版系统下载指南
nntxthml
windows
微软官方MSDN原版系统下载指南在信息技术日新月异的今天,操作系统作为计算机的核心软件,其稳定性和可靠性对于用户而言至关重要。MSDN(MicrosoftDeveloperNetwork)作为微软面向开发人员和技术专业人员的资源平台,提供了丰富的开发工具和资源,其中就包括微软官方发布的原版系统镜像。对于需要给电脑安装新系统的用户来说,选择MSDN版的系统无疑是一个明智之举,因为它直接来源于微软,确
- 文献阅读:全球农田的植被总初级生产力(GPP)、蒸散发(ET)和水分利用率(WUE)的变化研究
文献阅读的是Ai-2020的《Variationofgrossprimaryproduction,evapotranspirationandwateruseefficiencyforglobalcroplands》(IF6.5,SCIQ1)。01引言:研究背景和目的这篇论文的引言逻辑非常清楚,思路大致是:粮食安全→\rightarrow→提高农田生产力→\rightarrow→引出WUE、GPP和
- 20230808中原焦点团队中,27rose分享853天
rosewshx
“没有一个灵魂,愿意被别人的意志束缚,每个生命,生来要成为他自己。”父母要尊重孩子的命运,而不是掌控孩子的命运;要做好孩子的副驾驶,而不是抢过孩子的方向盘。孩子有自己的人生,有自己的轨迹。把他还给他自己,才是为人父母最大的成熟和智慧。
- Windows系统软件游戏丢失找不到mfperfhelper.dll修复解决方法
在使用电脑系统时经常会出现丢失找不到某些文件的情况,由于很多常用软件都是采用MicrosoftVisualStudio编写的,所以这类软件的运行需要依赖微软VisualC++运行库,比如像QQ、迅雷、Adobe软件等等,如果没有安装VC++运行库或者安装的版本不完整,就可能会导致这些软件启动时报错,提示缺少库文件。如果我们遇到关于文件在系统使用过程中提示缺少找不到的情况,如果文件是属于运行库文件的
- DataWhale 二月组队学习-深入浅出pytorch-Task04
-273.15K
DataWhale组队学习学习pytorch人工智能
一、自定义损失函数1.损失函数的作用与自定义意义在深度学习中,损失函数(LossFunction)用于衡量模型预测结果与真实标签之间的差异,是模型优化的目标。PyTorch内置了多种常用损失函数(如交叉熵损失nn.CrossEntropyLoss、均方误差nn.MSELoss等)。但在实际任务中,可能需要针对特定问题设计自定义损失函数,例如:处理类别不平衡问题(如加权交叉熵)实现特殊业务需求(如对
- 《Python Web 框架深度剖析:Django、Flask 与 FastAPI 的选择之道》
清水白石008
课程教程学习笔记开发语言python前端django
《PythonWeb框架深度剖析:Django、Flask与FastAPI的选择之道》开篇引入:从“胶水语言”到Web架构核心Python,自1991年由GuidovanRossum发布以来,凭借其简洁优雅的语法和强大的生态系统,逐渐成为全球最受欢迎的编程语言之一。它不仅在数据科学、人工智能、自动化脚本等领域大放异彩,更在Web开发领域构建起一套成熟的技术体系。作为一位长期从事Python开发与教
- ros订阅相机深度信息_基于深度相机 RealSense D435i 的 ORB SLAM 2
相比于上一篇文章,这里我们将官方给的rosbag数据包替换为来自深度相机的实时数据。之所以选择IntelRealSense这款深度相机,仅仅是因为它是最容易买到的。。。在京东上搜“深度相机”,符合要求的几乎都是这个系列的。具体到D435i这个型号,它可以提供深度和RGB图像,而且带有IMU,未来如果我们继续做视觉+惯导的SLAM也够用了。深度相机RealSenseD435i简介Intel官方给出了
- Realsense D435i 使用说明
D435i驱动安装及ROS使用Ubuntu16.04适配https://blog.csdn.net/lemonxiaoxiao/article/details/107834936过程中遇到fatalerror;需要添加标签。使用下面网址的博客解决了。https://blog.csdn.net/xuzhengzhe/article/details/135407342最终如下:target_compi
- 什么是java
IT界小新学姐
Java属于一种计算机语言,计算机语言的种类非常多,总的来说可以分成机器语言、汇编语言、高级语言三大类。Java是一种高级计算机语言。Java是由SunMicrosystems在1995年首先发布的编程语言和计算平台。有许多应用程序和Web站点只有在安装Java后才能正常工作,而且这样的应用程序和Web站点日益增多。Java快速、安全、可靠。从笔记本电脑到数据中心,从游戏控制台到科学超级计算机,从
- IIS部署ASP.Net Core 遇坑 502.记录
DemonTutor
IIS部署ASP.NetCore502.5错误和解决在Win2008的机器上部署ASP.NetCore程序,老是提示502.5错误。已经安装了MicrosoftVisualC++2015Redistributable.NETCoreWindowsServerHostingbundle对应版本的.NetCoreSDK,但程序就是跑不起来。出错截图直接使用dotnet命令程序是可以正常运行的,说明环境
- ROS1/Linux——linux虚拟机主ip地址:网络信息不可用
eagle_Annie
网络linuxtcp/ip
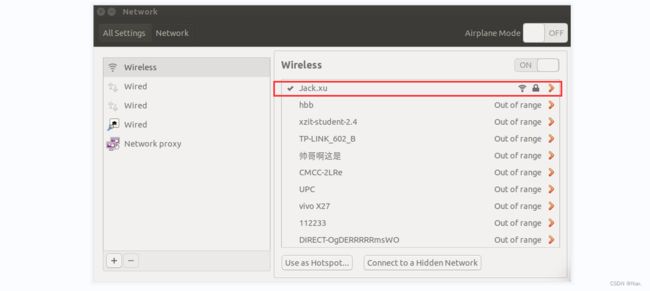
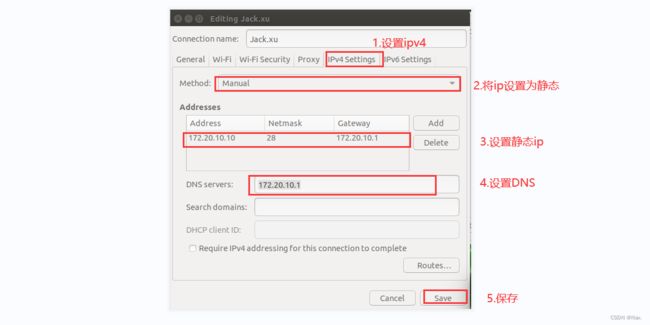
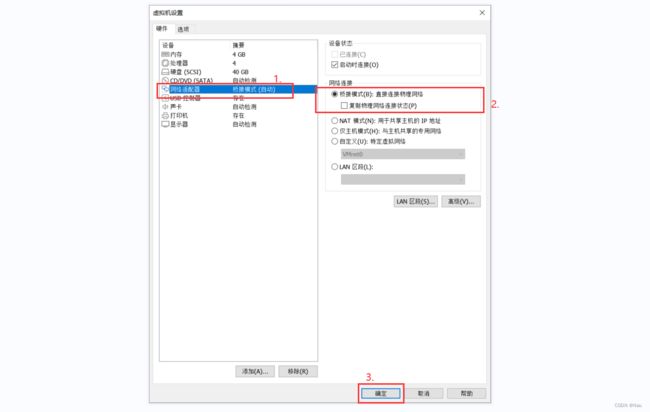
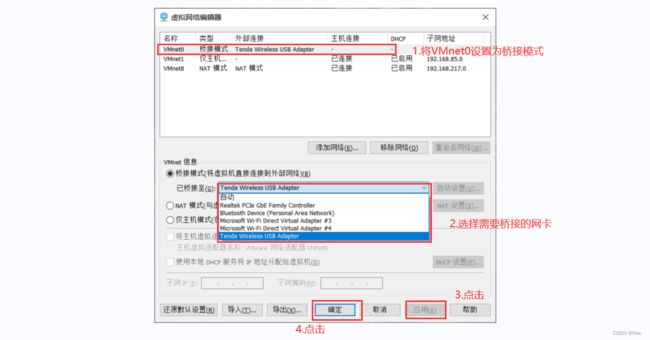
ROS1/Linux——linux虚拟机主ip地址:网络信息不可用文章目录ROS1/Linux——linux虚拟机主ip地址:网络信息不可用参考亿点链接问题描述最终解决方案参考亿点链接Unabletofetchsomearchives,mayberunapt-getupdateortrywith–fix-missinglinux虚拟机主ip地址:网络信息不可用(没IP)【问题解决】VMWare虚拟
- stm32驱动双步进电机
会编程的小孩
stm32单片机嵌入式硬件
连线看我上一个文章,这里只是补充上一个文章的代码部分,上一个是单步进电机的,这个是双步进电机。这里外加一个32的引脚定义表:具体接线看我上一个文章。PWM.C文件:#include"stm32f10x.h"#include"math.h"//步进电机参数配置#defineSTEPS_PER_REVOLUTION200//每转步数(1.8°/步)#defineMICROSTEPS16//微步细分#d
- C#——在WinForm中打开Excel文件,或打开Excel应用显示数据
木林森先生
C#Excelexcelc#开发语言
目录一、如何在WinForm中打开Excel文件二、打开Excel文件的代码详解三、如何向Excel中插入数据四、如何设置Excel里的单元格格式五、如何设置Excel里的页面格式一、如何在WinForm中打开Excel文件步骤:1、添加引用“MiscrosoftExcel16.0ObjectLibrary”,并导出命名空间:usingMicrosoft.Office.Core;usingExce
- Js函数返回值
_wy_
jsreturn
一、返回控制与函数结果,语法为:return 表达式;作用: 结束函数执行,返回调用函数,而且把表达式的值作为函数的结果 二、返回控制语法为:return;作用: 结束函数执行,返回调用函数,而且把undefined作为函数的结果 在大多数情况下,为事件处理函数返回false,可以防止默认的事件行为.例如,默认情况下点击一个<a>元素,页面会跳转到该元素href属性
- MySQL 的 char 与 varchar
bylijinnan
mysql
今天发现,create table 时,MySQL 4.1有时会把 char 自动转换成 varchar
测试举例:
CREATE TABLE `varcharLessThan4` (
`lastName` varchar(3)
) ;
mysql> desc varcharLessThan4;
+----------+---------+------+-
- Quartz——TriggerListener和JobListener
eksliang
TriggerListenerJobListenerquartz
转载请出自出处:http://eksliang.iteye.com/blog/2208624 一.概述
listener是一个监听器对象,用于监听scheduler中发生的事件,然后执行相应的操作;你可能已经猜到了,TriggerListeners接受与trigger相关的事件,JobListeners接受与jobs相关的事件。
二.JobListener监听器
j
- oracle层次查询
18289753290
oracle;层次查询;树查询
.oracle层次查询(connect by)
oracle的emp表中包含了一列mgr指出谁是雇员的经理,由于经理也是雇员,所以经理的信息也存储在emp表中。这样emp表就是一个自引用表,表中的mgr列是一个自引用列,它指向emp表中的empno列,mgr表示一个员工的管理者,
select empno,mgr,ename,sal from e
- 通过反射把map中的属性赋值到实体类bean对象中
酷的飞上天空
javaee泛型类型转换
使用过struts2后感觉最方便的就是这个框架能自动把表单的参数赋值到action里面的对象中
但现在主要使用Spring框架的MVC,虽然也有@ModelAttribute可以使用但是明显感觉不方便。
好吧,那就自己再造一个轮子吧。
原理都知道,就是利用反射进行字段的赋值,下面贴代码
主要类如下:
import java.lang.reflect.Field;
imp
- SAP HANA数据存储:传统硬盘的瓶颈问题
蓝儿唯美
HANA
SAPHANA平台有各种各样的应用场景,这也意味着客户的实施方法有许多种选择,关键是如何挑选最适合他们需求的实施方案。
在 《Implementing SAP HANA》这本书中,介绍了SAP平台在现实场景中的运作原理,并给出了实施建议和成功案例供参考。本系列文章节选自《Implementing SAP HANA》,介绍了行存储和列存储的各自特点,以及SAP HANA的数据存储方式如何提升空间压
- Java Socket 多线程实现文件传输
随便小屋
javasocket
高级操作系统作业,让用Socket实现文件传输,有些代码也是在网上找的,写的不好,如果大家能用就用上。
客户端类:
package edu.logic.client;
import java.io.BufferedInputStream;
import java.io.Buffered
- java初学者路径
aijuans
java
学习Java有没有什么捷径?要想学好Java,首先要知道Java的大致分类。自从Sun推出Java以来,就力图使之无所不包,所以Java发展到现在,按应用来分主要分为三大块:J2SE,J2ME和J2EE,这也就是Sun ONE(Open Net Environment)体系。J2SE就是Java2的标准版,主要用于桌面应用软件的编程;J2ME主要应用于嵌入是系统开发,如手机和PDA的编程;J2EE
- APP推广
aoyouzi
APP推广
一,免费篇
1,APP推荐类网站自主推荐
最美应用、酷安网、DEMO8、木蚂蚁发现频道等,如果产品独特新颖,还能获取最美应用的评测推荐。PS:推荐简单。只要产品有趣好玩,用户会自主分享传播。例如足迹APP在最美应用推荐一次,几天用户暴增将服务器击垮。
2,各大应用商店首发合作
老实盯着排期,多给应用市场官方负责人献殷勤。
3,论坛贴吧推广
百度知道,百度贴吧,猫扑论坛,天涯社区,豆瓣(
- JSP转发与重定向
百合不是茶
jspservletJava Webjsp转发
在servlet和jsp中我们经常需要请求,这时就需要用到转发和重定向;
转发包括;forward和include
例子;forwrad转发; 将请求装法给reg.html页面
关键代码;
req.getRequestDispatcher("reg.html
- web.xml之jsp-config
bijian1013
javaweb.xmlservletjsp-config
1.作用:主要用于设定JSP页面的相关配置。
2.常见定义:
<jsp-config>
<taglib>
<taglib-uri>URI(定义TLD文件的URI,JSP页面的tablib命令可以经由此URI获取到TLD文件)</tablib-uri>
<taglib-location>
TLD文件所在的位置
- JSF2.2 ViewScoped Using CDI
sunjing
CDIJSF 2.2ViewScoped
JSF 2.0 introduced annotation @ViewScoped; A bean annotated with this scope maintained its state as long as the user stays on the same view(reloads or navigation - no intervening views). One problem w
- 【分布式数据一致性二】Zookeeper数据读写一致性
bit1129
zookeeper
很多文档说Zookeeper是强一致性保证,事实不然。关于一致性模型请参考http://bit1129.iteye.com/blog/2155336
Zookeeper的数据同步协议
Zookeeper采用称为Quorum Based Protocol的数据同步协议。假如Zookeeper集群有N台Zookeeper服务器(N通常取奇数,3台能够满足数据可靠性同时
- Java开发笔记
白糖_
java开发
1、Map<key,value>的remove方法只能识别相同类型的key值
Map<Integer,String> map = new HashMap<Integer,String>();
map.put(1,"a");
map.put(2,"b");
map.put(3,"c"
- 图片黑色阴影
bozch
图片
.event{ padding:0; width:460px; min-width: 460px; border:0px solid #e4e4e4; height: 350px; min-heig
- 编程之美-饮料供货-动态规划
bylijinnan
动态规划
import java.util.Arrays;
import java.util.Random;
public class BeverageSupply {
/**
* 编程之美 饮料供货
* 设Opt(V’,i)表示从i到n-1种饮料中,总容量为V’的方案中,满意度之和的最大值。
* 那么递归式就应该是:Opt(V’,i)=max{ k * Hi+Op
- ajax大参数(大数据)提交性能分析
chenbowen00
WebAjax框架浏览器prototype
近期在项目中发现如下一个问题
项目中有个提交现场事件的功能,该功能主要是在web客户端保存现场数据(主要有截屏,终端日志等信息)然后提交到服务器上方便我们分析定位问题。客户在使用该功能的过程中反应点击提交后反应很慢,大概要等10到20秒的时间浏览器才能操作,期间页面不响应事件。
根据客户描述分析了下的代码流程,很简单,主要通过OCX控件截屏,在将前端的日志等文件使用OCX控件打包,在将之转换为
- [宇宙与天文]在太空采矿,在太空建造
comsci
我们在太空进行工业活动...但是不太可能把太空工业产品又运回到地面上进行加工,而一般是在哪里开采,就在哪里加工,太空的微重力环境,可能会使我们的工业产品的制造尺度非常巨大....
地球上制造的最大工业机器是超级油轮和航空母舰,再大些就会遇到困难了,但是在空间船坞中,制造的最大工业机器,可能就没
- ORACLE中CONSTRAINT的四对属性
daizj
oracleCONSTRAINT
ORACLE中CONSTRAINT的四对属性
summary:在data migrate时,某些表的约束总是困扰着我们,让我们的migratet举步维艰,如何利用约束本身的属性来处理这些问题呢?本文详细介绍了约束的四对属性: Deferrable/not deferrable, Deferred/immediate, enalbe/disable, validate/novalidate,以及如
- Gradle入门教程
dengkane
gradle
一、寻找gradle的历程
一开始的时候,我们只有一个工程,所有要用到的jar包都放到工程目录下面,时间长了,工程越来越大,使用到的jar包也越来越多,难以理解jar之间的依赖关系。再后来我们把旧的工程拆分到不同的工程里,靠ide来管理工程之间的依赖关系,各工程下的jar包依赖是杂乱的。一段时间后,我们发现用ide来管理项程很不方便,比如不方便脱离ide自动构建,于是我们写自己的ant脚本。再后
- C语言简单循环示例
dcj3sjt126com
c
# include <stdio.h>
int main(void)
{
int i;
int count = 0;
int sum = 0;
float avg;
for (i=1; i<=100; i++)
{
if (i%2==0)
{
count++;
sum += i;
}
}
avg
- presentModalViewController 的动画效果
dcj3sjt126com
controller
系统自带(四种效果):
presentModalViewController模态的动画效果设置:
[cpp]
view plain
copy
UIViewController *detailViewController = [[UIViewController al
- java 二分查找
shuizhaosi888
二分查找java二分查找
需求:在排好顺序的一串数字中,找到数字T
一般解法:从左到右扫描数据,其运行花费线性时间O(N)。然而这个算法并没有用到该表已经排序的事实。
/**
*
* @param array
* 顺序数组
* @param t
* 要查找对象
* @return
*/
public stati
- Spring Security(07)——缓存UserDetails
234390216
ehcache缓存Spring Security
Spring Security提供了一个实现了可以缓存UserDetails的UserDetailsService实现类,CachingUserDetailsService。该类的构造接收一个用于真正加载UserDetails的UserDetailsService实现类。当需要加载UserDetails时,其首先会从缓存中获取,如果缓存中没
- Dozer 深层次复制
jayluns
VOmavenpo
最近在做项目上遇到了一些小问题,因为架构在做设计的时候web前段展示用到了vo层,而在后台进行与数据库层操作的时候用到的是Po层。这样在业务层返回vo到控制层,每一次都需要从po-->转化到vo层,用到BeanUtils.copyProperties(source, target)只能复制简单的属性,因为实体类都配置了hibernate那些关联关系,所以它满足不了现在的需求,但后发现还有个很
- CSS规范整理(摘自懒人图库)
a409435341
htmlUIcss浏览器
刚没事闲着在网上瞎逛,找了一篇CSS规范整理,粗略看了一下后还蛮有一定的道理,并自问是否有这样的规范,这也是初入前端开发的人一个很好的规范吧。
一、文件规范
1、文件均归档至约定的目录中。
具体要求通过豆瓣的CSS规范进行讲解:
所有的CSS分为两大类:通用类和业务类。通用的CSS文件,放在如下目录中:
基本样式库 /css/core
- C++动态链接库创建与使用
你不认识的休道人
C++dll
一、创建动态链接库
1.新建工程test中选择”MFC [dll]”dll类型选择第二项"Regular DLL With MFC shared linked",完成
2.在test.h中添加
extern “C” 返回类型 _declspec(dllexport)函数名(参数列表);
3.在test.cpp中最后写
extern “C” 返回类型 _decls
- Android代码混淆之ProGuard
rensanning
ProGuard
Android应用的Java代码,通过反编译apk文件(dex2jar、apktool)很容易得到源代码,所以在release版本的apk中一定要混淆一下一些关键的Java源码。
ProGuard是一个开源的Java代码混淆器(obfuscation)。ADT r8开始它被默认集成到了Android SDK中。
官网:
http://proguard.sourceforge.net/
- 程序员在编程中遇到的奇葩弱智问题
tomcat_oracle
jquery编程ide
现在收集一下:
排名不分先后,按照发言顺序来的。
1、Jquery插件一个通用函数一直报错,尤其是很明显是存在的函数,很有可能就是你没有引入jquery。。。或者版本不对
2、调试半天没变化:不在同一个文件中调试。这个很可怕,我们很多时候会备份好几个项目,改完发现改错了。有个群友说的好: 在汤匙
- 解决maven-dependency-plugin (goals "copy-dependencies","unpack") is not supported
xp9802
dependency
解决办法:在plugins之前添加如下pluginManagement,二者前后顺序如下:
[html]
view plain
copy
<build>
<pluginManagement