ROS实验笔记之——SLAM无人驾驶初入门
最近想学习一下无人驾驶SLAM方面的内容
Dynamic Object SLAM in Autonomous Driving
常规的SLAM算法首先假设环境中所有物体均处于静止的状态。而一些能够在动态环境中运行的SLAM系统,只是将环境中的动态物体视为异常值并将他们从环境中剔除,再使用常规的SLAM算法进行处理。这严重影响SLAM在自动驾驶中的应用。
但这应该是看场景的。比如根小伙伴聊的时候,对方也提出的观点是比起场景的背景,这些动态的障碍物所带来的特征很少,而整个场景的约束却很多。比如用激光雷达,扫到的所有东西必然会记录到点云信息中,但是当再次回到对应的位置时,场景其他点云的约束能把结果拉回到正确上面,这样场景的动态障碍物只是异常值。
Monocular dynamic object SLAM (MonoDOS) 通过两种方式对常规SLAM进行扩展。其一,具有对象感知功能,不仅可以检测跟踪关键点,还可以检测跟踪具有语义含义的对象。其次,它可以处理带有动态对象的场景并跟踪对象运动。
DOS系统引入了对象的概念,这个概念具有以下几个内容。首先,需要从单个图像帧中提取对象,就相当于常规SLAM系统中的关键点(例如ORB-SLAM中的ORB特征点)提取阶段。该阶段将给出2D或3D对象检测结果。现阶段单目3D对象检测取得了很大进展。其次,它的数据关联性更加复杂。静态SLAM只关心图像中的关键点,因此静态SLAM的数据关联只是关键帧特征向量的匹配。对于动态SLAM我们必须对帧中的关键点和对象之间执行数据关联。第三,作为传统SLAM中Bundle Adjustment的拓展,我们必须为这个处理过程添加跟踪对象(tracklet)和动态关键点,其次还可以利用运动模型中的速度约束。
CubeSLAM: Monocular 3D Object SLAM
https://arxiv.org/pdf/1806.00557.pdf
GitHub - shichaoy/cube_slam: CubeSLAM: Monocular 3D Object Detection and SLAM
首先,来看一下这篇TRO19的文章。cubeSLAM的主要贡献之一就是巧妙地将检测到的障碍物以长方体的形式集成到因子图优化中,并使用运动模型来限制长方体的可能运动,优化了物体的速度。
检测到的动态障碍物和SLAM可以相互促进。不像传统的SLAM把动态障碍物作为outlier。动态障碍物为BA和深度初始化提供了几何约束。除此之外它还增加了泛化功能,使orb slam可以在低纹理环境中工作。mono3D结果通过BA优化,并通过运动模型进行约束。但是并没有去除建图中的障碍物
如图所示

Dynamic object SLAM. Blue nodes represent the static SLAM component and red ones represent new dynamic variables. The green squares are the new factors of dynamic map including motion model constraints and observations of objects and points.
对象提取
这篇文章将2D对象检测和初级图像特征点用于3D长方体的检测和评分。看似简单的方法对椅子和汽车的检测都具有非常好的效果。但是基于深度学习的方法可以得到更加精确的结果。
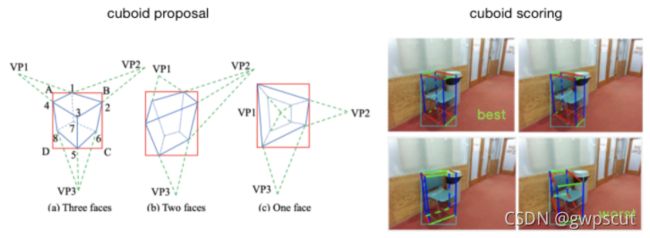 长方体对象的生成和评分
长方体对象的生成和评分
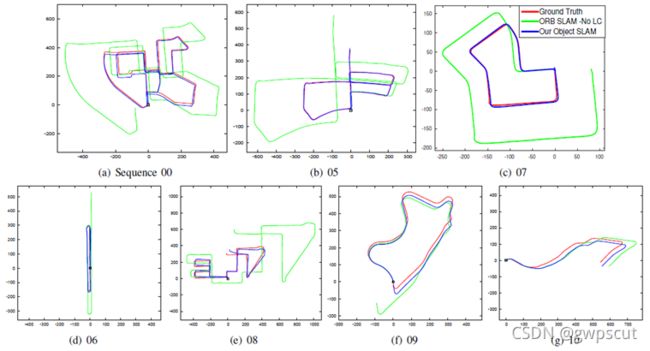
这是它的效果。它这是跟没有回环的ORB-SLAM对比的。但说实话,感觉就是哪怕把动态障碍物作为干扰的其他SLAM的方法,也可以做到不错的效果。就是感觉上动态障碍物检测处理,用于约束camera pose是可靠的,但把SLAM中的动态障碍物去除好像没什么意义。。。
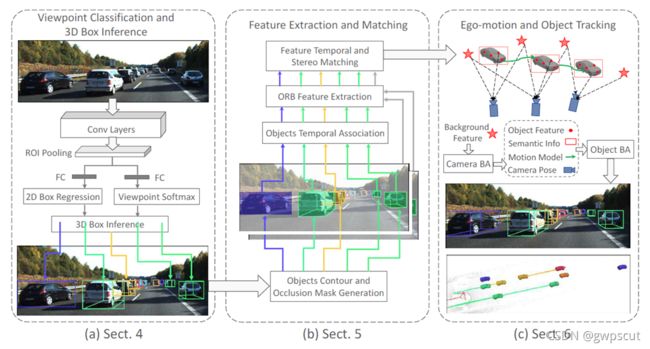
Stereo Vision-based Semantic 3D Object and Ego-motion Tracking for Autonomous Driving
这篇论文也是检测以及跟踪动态障碍物,然后基于动态障碍物的重投影误差来优化camera的pose。
它是基于双目视觉的。它的contribution主要有两个。1、轻量级的语义分割方法提取3D目标。2、基于动态障碍物的BA优化。
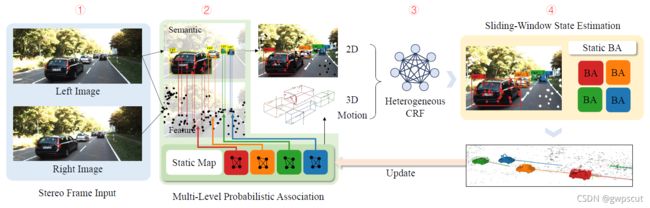
Clustervo: Clustering moving instances and estimating visual odometry for self and surroundings
ClusterVO通过将动态对象表示为跟踪的关键点(或本文中的地标)的群集,使用YOLOv3作为2D对象检测器,为每个帧中的对象提出语义2D边界框。它不对描述对象进行假定。因此,相较于上述两篇文章没有长方体的产生阶段。
Multi-object monocular slam for dynamic environments
这论文呢,是单目camera,多目标检测。
但其实关键解决的问题都差不多,检测以及跟踪视野中的多个动态障碍物。然后基于tracking动态障碍物的pose来做联合的优化camera的pose
在kitti上测试一些demo
这里先基于kitti数据集,进行测试。之前博客中已经介绍过kitti数据集了。本博文就用这个数据集来进行各种经典方法的复现
The KITTI Vision Benchmark Suite http://www.cvlibs.net/datasets/kitti/eval_odometry.php
http://www.cvlibs.net/datasets/kitti/eval_odometry.php
VINS-FUSION
VINS-Fusion demo
把vins-mono也配置一下好了~
GitHub - HKUST-Aerial-Robotics/VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimatorhttps://github.com/HKUST-Aerial-Robotics/VINS-Mono
主要cm的时候会报错,把里面cmakelist的c++11改为14即可
这样可以避免出错,但好像运行会报错
试试改为ceres-solver-1.14.0。再编译。发现还是不可以。。。。重装系统看看。
在另外一台电脑上尝试了不行,然后把vins-fusion也编译了一下,然后运行过vins-fusion后就可以了???再运行好就work了。。。奇怪。。。。
最终发现问题了,要按下面顺序运行才可以。。。cao
这个原因非常的迷惑。。。。。
roslaunch vins_estimator vins_rviz.launch
roslaunch vins_estimator euroc.launch
下载数据集kmavvisualinertialdatasets – ASL Datasetshttps://projects.asl.ethz.ch/datasets/doku.php?id=kmavvisualinertialdatasets
vins系列真的非常丰富,下面还有个co-vins
https://github.com/qintonguav/Co-VINShttps://github.com/qintonguav/Co-VINS
还有GNSS-VINS
https://github.com/HKUST-Aerial-Robotics/GVINShttps://github.com/HKUST-Aerial-Robotics/GVINS
A-LOAM
之前博客《学习笔记之——激光雷达SLAM(LOAM系列的复现与学习)》已经配置过A-LOAM了。本博文来跑一下其kitti数据集
GitHub - HKUST-Aerial-Robotics/A-LOAM: Advanced implementation of LOAMAdvanced implementation of LOAM. Contribute to HKUST-Aerial-Robotics/A-LOAM development by creating an account on GitHub. https://github.com/HKUST-Aerial-Robotics/A-LOAM
https://github.com/HKUST-Aerial-Robotics/A-LOAM
注意,对于下载的数据集需要按以下的形式打包放好

data
|----poses
| |----00.txt
|----sequences
| |----00
| | |----image_0
| | |----image_1
| | |----velodyne
| | |----time.txt
然后将kitti的launch修改为:
好坑。。上面那样的list是不对的。要改为下面这样才对(建议直接看源代码)

运行效果如下图所示
视频连接:
aloam
LIO-SAM
https://github.com/TixiaoShan/LIO-SAMhttps://github.com/TixiaoShan/LIO-SAM
有可能出现缺乏依赖libmetis.so而报错。运行下面命令安装即可
sudo apt-get install -y libmetis-dev
如若需要允许kitti数据集,则需要将config里面的参数文件修改如下:
lio_sam:
# Topics
pointCloudTopic: "points_raw" # Point cloud data
# imuTopic: "imu_raw" # IMU data
imuTopic: "imu_correct" # IMU data
odomTopic: "odometry/imu" # IMU pre-preintegration odometry, same frequency as IMU
gpsTopic: "odometry/gpsz" # GPS odometry topic from navsat, see module_navsat.launch file
# Frames
lidarFrame: "base_link"
baselinkFrame: "base_link"
odometryFrame: "odom"
mapFrame: "map"
# GPS Settings
useImuHeadingInitialization: true # if using GPS data, set to "true"
useGpsElevation: false # if GPS elevation is bad, set to "false"
gpsCovThreshold: 2.0 # m^2, threshold for using GPS data
poseCovThreshold: 25.0 # m^2, threshold for using GPS data
# Export settings
savePCD: false # https://github.com/TixiaoShan/LIO-SAM/issues/3
savePCDDirectory: "/Downloads/LOAM/" # in your home folder, starts and ends with "/". Warning: the code deletes "LOAM" folder then recreates it. See "mapOptimization" for implementation
# Sensor Settings
sensor: velodyne # lidar sensor type, either 'velodyne' or 'ouster'
N_SCAN: 64 #16 # number of lidar channel (i.e., 16, 32, 64, 128)
Horizon_SCAN: 1800 # lidar horizontal resolution (Velodyne:1800, Ouster:512,1024,2048)
downsampleRate: 2 #1 # default: 1. Downsample your data if too many points. i.e., 16 = 64 / 4, 16 = 16 / 1
lidarMinRange: 1.0 # default: 1.0, minimum lidar range to be used
lidarMaxRange: 1000.0 # default: 1000.0, maximum lidar range to be used
# IMU Settings
imuAccNoise: 3.9939570888238808e-03
imuGyrNoise: 1.5636343949698187e-03
imuAccBiasN: 6.4356659353532566e-05
imuGyrBiasN: 3.5640318696367613e-05
imuGravity: 9.80511
imuRPYWeight: 0.01
# Extrinsics (lidar -> IMU)
extrinsicTrans: [-8.086759e-01, 3.195559e-01, -7.997231e-01]
extrinsicRot: [9.999976e-01, 7.553071e-04, -2.035826e-03, -7.854027e-04, 9.998898e-01, -1.482298e-02, 2.024406e-03, 1.482454e-02, 9.998881e-01]
extrinsicRPY: [9.999976e-01, 7.553071e-04, -2.035826e-03, -7.854027e-04, 9.998898e-01, -1.482298e-02, 2.024406e-03, 1.482454e-02, 9.998881e-01]
# extrinsicRot: [1, 0, 0,
# 0, 1, 0,
# 0, 0, 1]
# extrinsicRPY: [1, 0, 0,
# 0, 1, 0,
# 0, 0, 1]
# LOAM feature threshold
edgeThreshold: 1.0
surfThreshold: 0.1
edgeFeatureMinValidNum: 10
surfFeatureMinValidNum: 100
# voxel filter paprams
odometrySurfLeafSize: 0.4 # default: 0.4 - outdoor, 0.2 - indoor
mappingCornerLeafSize: 0.2 # default: 0.2 - outdoor, 0.1 - indoor
mappingSurfLeafSize: 0.4 # default: 0.4 - outdoor, 0.2 - indoor
# robot motion constraint (in case you are using a 2D robot)
z_tollerance: 1000 # meters
rotation_tollerance: 1000 # radians
# CPU Params
numberOfCores: 4 # number of cores for mapping optimization
mappingProcessInterval: 0.15 # seconds, regulate mapping frequency
# Surrounding map
surroundingkeyframeAddingDistThreshold: 1.0 # meters, regulate keyframe adding threshold
surroundingkeyframeAddingAngleThreshold: 0.2 # radians, regulate keyframe adding threshold
surroundingKeyframeDensity: 2.0 # meters, downsample surrounding keyframe poses
surroundingKeyframeSearchRadius: 50.0 # meters, within n meters scan-to-map optimization (when loop closure disabled)
# Loop closure
loopClosureEnableFlag: true
loopClosureFrequency: 1.0 # Hz, regulate loop closure constraint add frequency
surroundingKeyframeSize: 50 # submap size (when loop closure enabled)
historyKeyframeSearchRadius: 15.0 # meters, key frame that is within n meters from current pose will be considerd for loop closure
historyKeyframeSearchTimeDiff: 30.0 # seconds, key frame that is n seconds older will be considered for loop closure
historyKeyframeSearchNum: 25 # number of hostory key frames will be fused into a submap for loop closure
historyKeyframeFitnessScore: 0.3 # icp threshold, the smaller the better alignment
# Visualization
globalMapVisualizationSearchRadius: 1000.0 # meters, global map visualization radius
globalMapVisualizationPoseDensity: 10.0 # meters, global map visualization keyframe density
globalMapVisualizationLeafSize: 1.0 # meters, global map visualization cloud density
# Navsat (convert GPS coordinates to Cartesian)
navsat:
frequency: 50
wait_for_datum: false
delay: 0.0
magnetic_declination_radians: 0
yaw_offset: 0
zero_altitude: true
broadcast_utm_transform: false
broadcast_utm_transform_as_parent_frame: false
publish_filtered_gps: false
# EKF for Navsat
ekf_gps:
publish_tf: false
map_frame: map
odom_frame: odom
base_link_frame: base_link
world_frame: odom
frequency: 50
two_d_mode: false
sensor_timeout: 0.01
# -------------------------------------
# External IMU:
# -------------------------------------
imu0: imu_correct
# make sure the input is aligned with ROS REP105. "imu_correct" is manually transformed by myself. EKF can also transform the data using tf between your imu and base_link
imu0_config: [false, false, false,
true, true, true,
false, false, false,
false, false, true,
true, true, true]
imu0_differential: false
imu0_queue_size: 50
imu0_remove_gravitational_acceleration: true
# -------------------------------------
# Odometry (From Navsat):
# -------------------------------------
odom0: odometry/gps
odom0_config: [true, true, true,
false, false, false,
false, false, false,
false, false, false,
false, false, false]
odom0_differential: false
odom0_queue_size: 10
# x y z r p y x_dot y_dot z_dot r_dot p_dot y_dot x_ddot y_ddot z_ddot
process_noise_covariance: [ 1.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 1.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 10.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0.03, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0.03, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0.1, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0.25, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0.25, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0.04, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0.01, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.01, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.5, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.01, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.01, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.015]
同样的类似ALOAM,作者也给出了从kitti生成rosbag的代码
To generate more bags using other KITTI raw data, you can use the python script provided in "config/doc/kitti2bag".
视频效果如下:
LIO-SAM
Stereo Visual Inertial Pose Estimation Based on Feedforward-Feedback Loops
这是港理工的一个开源项目。论文链接见:https://arxiv.org/pdf/2007.02250.pdf
按照要求配置看看~
GitHub - HKPolyU-UAV/FLVIS: FLVIS: Feedback Loop Based Visual Initial SLAMhttps://github.com/HKPolyU-UAV/FLVIS
如果kitti报错
(.text.startup+0x4e8):对‘Sophus::SE3::SE3()’未定义的引用可以参考(Sophus 编译错误_u010003609的博客-CSDN博客)
将对应的cmkaelist文件改为
cmake_minimum_required(VERSION 2.8.3)
project(flvis)
add_definitions(-std=c++11)
#set(CMAKE_CXX_FLAGS "-std=c++11)
set(CMAKE_CXX_FLAGS "-std=c++11 ${CMAKE_CXX_FLAGS} -O3 -Wall -pthread") # -Wextra -Werror
set(CMAKE_BUILD_TYPE "RELEASE")
list(APPEND CMAKE_MODULE_PATH ${CMAKE_CURRENT_SOURCE_DIR}/3rdPartLib/g2o/cmake_modules)
set(G2O_ROOT /usr/local/include/g2o)
find_package(G2O REQUIRED)
find_package (OpenCV 3 REQUIRED)
find_package (Eigen3 REQUIRED)
find_package (CSparse REQUIRED )
find_package (Sophus REQUIRED )
find_package (yaml-cpp REQUIRED )
find_package (DBoW3 REQUIRED)
# pcl
find_package( PCL REQUIRED)
include_directories( ${PCL_INCLUDE_DIRS} )
add_definitions( ${PCL_DEFINITIONS} )
#FIND_PACKAGE(octomap REQUIRED )
#FIND_PACKAGE(octovis REQUIRED )
#INCLUDE_DIRECTORIES(${OCTOMAP_INCLUDE_DIRS})
find_package(catkin REQUIRED COMPONENTS
nodelet
roscpp
rostime
std_msgs
sensor_msgs
geometry_msgs
nav_msgs
pcl_ros
tf
visualization_msgs
image_transport
cv_bridge
message_generation
message_filters
)
add_message_files(
FILES
KeyFrame.msg
CorrectionInf.msg
)
generate_messages(
DEPENDENCIES
std_msgs
sensor_msgs
geometry_msgs
nav_msgs
visualization_msgs
)
## Declare a catkin package
catkin_package(
CATKIN_DEPENDS message_runtime
)
include_directories(
${catkin_INCLUDE_DIRS}
${OpenCV_INCLUDE_DIRS}
${G2O_INCLUDE_DIRS}
${CSPARSE_INCLUDE_DIR}
${Sophus_INCLUDE_DIRS}
${YAML_CPP_INCLUDE_DIR}
${DBoW3_INCLUDE_DIR}
"${CMAKE_CURRENT_SOURCE_DIR}/src/"
"${CMAKE_CURRENT_SOURCE_DIR}/src/processing/"
"${CMAKE_CURRENT_SOURCE_DIR}/src/backend/"
"${CMAKE_CURRENT_SOURCE_DIR}/src/frontend/"
"${CMAKE_CURRENT_SOURCE_DIR}/src/utils/"
"${CMAKE_CURRENT_SOURCE_DIR}/src/visualization/"
#"${CMAKE_CURRENT_SOURCE_DIR}/src/octofeeder/"
)
SET(G2O_LIBS cholmod cxsparse -lg2o_cli -lg2o_core
-lg2o_csparse_extension -lg2o_ext_freeglut_minimal -lg2o_incremental
-lg2o_interactive -lg2o_interface -lg2o_opengl_helper -lg2o_parser
-lg2o_simulator -lg2o_solver_cholmod -lg2o_solver_csparse
-lg2o_solver_dense -lg2o_solver_pcg -lg2o_solver_slam2d_linear
-lg2o_solver_structure_only -lg2o_stuff -lg2o_types_data -lg2o_types_icp
-lg2o_types_sba -lg2o_types_sclam2d -lg2o_types_sim3 -lg2o_types_slam2d
-lg2o_types_slam3d)
## Declare a C++ library
add_library(flvis
#processing
src/processing/feature_dem.cpp
src/processing/depth_camera.cpp
src/processing/landmark.cpp
src/processing/camera_frame.cpp
src/processing/triangulation.cpp
src/processing/lkorb_tracking.cpp
src/processing/imu_state.cpp
src/processing/vi_motion.cpp
src/processing/optimize_in_frame.cpp
#vis
src/visualization/rviz_frame.cpp
src/visualization/rviz_path.cpp
src/visualization/rviz_pose.cpp
src/visualization/rviz_odom.cpp
#msg
src/utils/keyframe_msg.cpp
src/utils/correction_inf_msg.cpp
#node tracking
src/frontend/vo_tracking.cpp
src/frontend/f2f_tracking.cpp
#node localmap
src/backend/vo_localmap.cpp
#node loop closing
src/backend/vo_loopclosing.cpp
src/backend/poselmbag.cpp
#src/octofeeder/octomap_feeder.cpp
)
add_dependencies(flvis
flvis_generate_messages_cpp
${catkin_EXPORTED_TARGETS})
target_link_libraries(flvis
${catkin_LIBRARIES}
${OpenCV_LIBRARIES}
${CSPARSE_LIBRARY}
${Sophus_LIBRARIES}
${YAML_CPP_LIBRARIES}
${DBoW3_LIBRARIES}
${G2O_LIBS}
${PCL_LIBRARIES}
${Boost_SYSTEM_LIBRARY}
#${OCTOMAP_LIBRARIES}
)
#independent modules
#1 euroc_publisher publish path
add_executable(vo_repub_rec
src/independ_modules/vo_repub_rec.cpp)
target_link_libraries(vo_repub_rec
${catkin_LIBRARIES}
${Sophus_LIBRARIES})
add_executable(kitti_publisher
src/independ_modules/kitti_publisher.cpp
src/visualization/rviz_path.cpp)
set(Sophus_LIBRARIES libSophus.so)
target_link_libraries(kitti_publisher
${catkin_LIBRARIES}
${Sophus_LIBRARIES})
注意,可能出现g2o安装不好导致有问题,重新装一下即可
修改对应的launch文件,数据集还是上面整理好的
roslaunch flvis rviz_kitti.launch
roslaunch flvis flvis_kitti.launch效果如下

flvis
DSO: Direct Sparse Odometry
DSO跑KITTI数据集_SLAM的博客-CSDN博客
DSO安装与调试 - huicanlin - 博客园
LDSO
https://github.com/tum-vision/LDSO
./bin/run_dso_kitti \
preset=0 \
files=/home/kwanwaipang/dataset/kitti/data/sequences/00/ \
calib=./examples/Kitti/Kitti00-02.txt跟着里面的教程安装及编译就好~~~
视频如下:
LDSO
A Robust, Real-time, LiDAR-Inertial-Visual tightly-coupled state Estimator and mapping
https://github.com/hku-mars/r2live
安装一些依赖
sudo apt-get install ros-melodic-cv-bridge ros-melodic-tf ros-melodic-message-filters ros-melodic-image-transport
然后安装livox驱动https://github.com/Livox-SDK/livox_ros_driver
cm的时候可能会报错
error: conflicting declaration ‘typedef struct LZ4_streamDecode_t LZ4_streamDecode_t’参考https://github.com/ethz-asl/lidar_align/issues/16
即可~
roslaunch r2live demo.launch
rosbag play YOUR_DOWNLOADED.bag
运行效果如下:
R2LIVE
OverlapNet - Loop Closing for 3D LiDAR-based SLAM
https://github.com/PRBonn/OverlapNet
High-speed Autonomous Drifting with Deep Reinforcement Learning
GitHub - caipeide/drift_drl: High-speed Autonomous Drifting with Deep Reinforcement Learning
https://sites.google.com/view/autonomous-drifting-with-drl
参考资料
https://github.com/PRBonn/semantic_suma
一文了解动态场景中的SLAM的研究现状 - 云+社区 - 腾讯云
https://towardsdatascience.com/monocular-dynamic-object-slam-in-autonomous-driving-f12249052bf1