clickhouse到底有哪些吊炸天的优化?
概述
查询的本质是什么?
所谓查询,说白了,就是在一堆有序或者无序的数据中,按照一定的条件,筛选出我们期望的数据集。
ClickHouse以快著称。它到底有多快?它又为什么快?说到底,还是绕不开它的底层存储逻辑。本文以CllickHouse使用最为广泛的MergeTree引擎为例,来揭开ClickHouse性能的神秘面纱。
我们知道,查有序的数据一定比查无序的数据速度要快。不论是从磁盘里查,还是直接从内存里查,均是同理。
写数据则相反,无序的写比有序的写,速度要更快。但是为了查询有序,我们就不得不在插入的时候对数据进行排序。那么怎么排序才合理?特别是海量数据的时候,如何才能保证这种排序性能是幂等的?尤其是当数据一批一批的插入的时候,有没有一种比较稳定的排序算法来完成这一工作?其实我们很快就能想到类似归并排序的思想。我们先对插入的每一批数据进行排序,然后再将不同批次插入的有序数据进行merge,并保证merge之后的数据有序就行了。那么一下子我们就联系到了MergeTree的底层核心思想。
MergeTree存储原理
为什么在聊性能优化之前,我们会先讨论MergeTree的存储原理。因为一切的所谓调优,都是建立在存储原理之上的。只有搞明白了数据存储的原理,它在内存里是如何排布的,才能有的放驶,做出针对性的优化。而不是在网上随便找到一篇文章就奉为圭臬,无脑使用,如果运用场景不对,不仅没有任何优化效果,相反会带来可怕的负优化。
MergeTree是在merge什么
MergeTree的核心是Merge,合并什么?它是将同一个partition内的多个part进行合并。很多初学者可能弄不清part和partition之间的区别。
part是ClickHouse为了加速插入,引入的一个概念。在ClickHouse中,每个线程的每次插入操作,都会产生一个part,这样如果我们开启了多线程来插入(可以通过max_insert_threads来设置),正常情况下,每次insert动作,肯定是处于不同的线程中的,因此每次插入,至少都会产生一个part。这样并发写入,且各个part之间的数据互不影响,所以可以做到快速的插入。
那么这样的快速插入 必然会带来一个问题:查询怎么办?
有可能我第一次插入的和第二次插入的数据有相近的,甚至数据完全相同都是有可能的。这时候如果直接去查part,那么必然需要扫描所有的part,这时候必然会成为性能的拖累(即使part已经是有序的)。我们可以简单举一个例子如下:
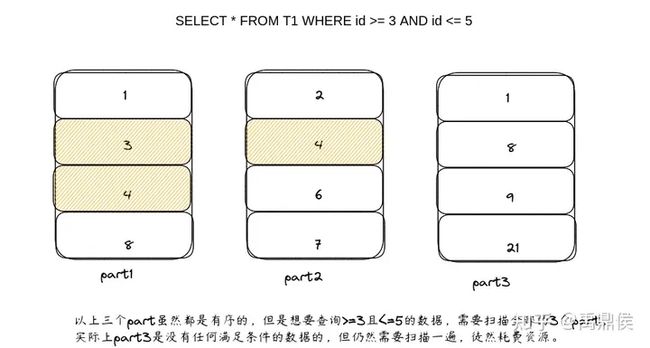
上面有三个part,现在我的诉求是查询出其中>=3且<=5的所有数据,虽然在各个part内部,数据本身是有序的,但是这三个part很不凑巧地都包含了3~5的范围,因此必须每个part都扫描一遍,而实际上,part3是没有任何符合条件的数据的,所以这个扫描其实是无用的操作。如果part数量特别多呢?如果查询的条件再苛刻些呢?那么对整个查询的性能影响已经到了无法忽略的地步。
这时候就体现出merge的作用了。所谓merge,他就是将各个满足同一分区范围的数据合并成一个更大的part。假设上述三个part都处于同一个partition内,那么最终效果如下:

合并完之后,数据成了上面的样子 ,这时候查询就非常简单了。直接二分查找就可以。
那么接下来人们肯定关心的一个话题是,什么时候去merge?怎么去merge?
首先,merge肯定是在后台进行的,而不是数据一插入就立即merge。一种比较普遍的说法是数据插入后8-10分钟后会自行merge。这种说法大抵正确,但不全面。
merge的时机的确是不确定的。它既不能每插一批数据数据就进行一次merge,那样势必会拖慢插入的速度。也不能一直不merge,那样就是前面说的问题,查询开销太大。为了寻找这个平衡点,在ClickHouse里,Merge的算法有一个核心参数,叫做base,它决定了part要不要参与merge。为了讲清楚这个base参数,我们同样来举一个例子。
下面我们以base = 3来举例。

如上图所示, base = 3,代表每3个part 合并成更高一级的part, 我们叫它Level1, 然后3个Level1进一步合并成Level2, 从逻辑层面看上去,就像一棵树。这也就是MergeTree的Tree的由来。
那么ClickHouse里base是如何取值的呢?在ClickHouse里,base初始取值为5,但并不总是一成不变的,如果最小的part长时间得不到合并,那就说明base取值过大,它会适当调小;如果参与merge的part的总大小很小,那么base也会适当减小;当然,part总数本来就比较少,base也会适当减小。
为什么base取值和part的大小还有关系呢?因为并不是part数达到了这个base就会合并,它只是一个准入条件,而不是一个充分条件。他真正merge的时机是要判断 总part大小 / 最大part大小 >= base 才会去合并。
所以在某些情况下,可能存在有些part永远得不到merge的情况。(思考下,什么场景会出现?又该怎么解决?)
partition
上面讲了半天的merge,主要还是针对part而言的。那么parttition又是什么呢?它又是由什么决定的?
partition是一个逻辑上的概念,不像part,是有实物可以看得见摸得着的。我们在建表的时候,可以指定partition by的字段的。由于是使用者自己指定,那么,就有很大的可操作空间。可以说,partition是否合理,很可能会影响到查询和写入的性能。
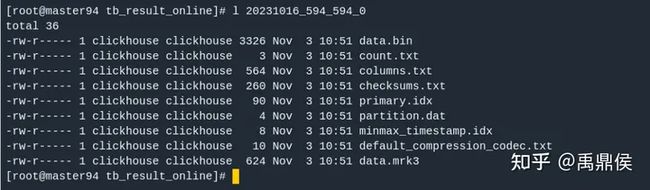
对于ClickHouse来说,每个part,实际上都是一个文件夹,该文件夹下存储了具体的列存数据,列越多,那么文件也就越多。
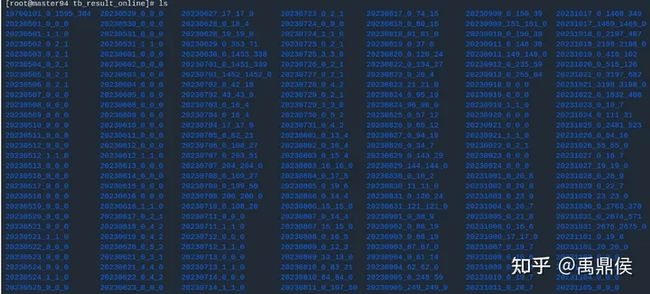
part越多,意味着文件越多,也就意味着merge需要更多次才能完成。从上图可以看到,有些合并甚至达到了571次。合并本身是需要消耗CPU和内存的,资源被merge占掉了一部分,那么查询和写入的性能就会受到影响。而且文件数目过多,对文件系统本身来说也是沉重的负担。最重要的,merge不是时时刻刻都在发生的,所以当一个查询语句过来,虽然有部分数据可以在合并后的part中找,但未来得及合并部分的数据,还是要在小part里找。那么part数太多,查询自然就会越慢。
以上是part数太多的坏处。
那么怎样会导致part数太多呢?一个最显而易见的场景就是小批量频繁插入,每次插入都会产生一个part。所以clickhouse的写入,是提倡大批次插入的。测试表明,单批次插入数据上万甚至上百万都是没有问题的。
但是单批次插入数据过多的话,也需要注意一些问题。
首先就是实时性,如果一定要等数据量达到某一个数值才插入,那么当数据源生产较慢时,肯定会带来延迟。但是这个有解决方案,那就是设定一个超时时间,如果超时时间到了,即使没有积攒够一个批次,也插入到数据库中。
第二个问题是大批量插入必然会带来大内存消耗。
第三个问题是如果数据本身不规范,那么大批次数据插入很容易带来"TOO MANY PARTITIONS"的报错。它的意思是说单批次插入的数据中包含了过多的partition(一般是100个)。这个限制也是出于性能考虑,因为即使是在一次插入,它的数据处于不同的partition,那么仍然是落在不同的文件夹里的,如果同时写入的文件夹数过多,那么必然会带来性能的损耗。也就失去了先写part后merge的意义了。
前面提到过,partition中的数据实际上是有序的,那么也就是说,如果查询的语句中带有partition by的字段,可以非常快捷地根据排序字段做二分查找。
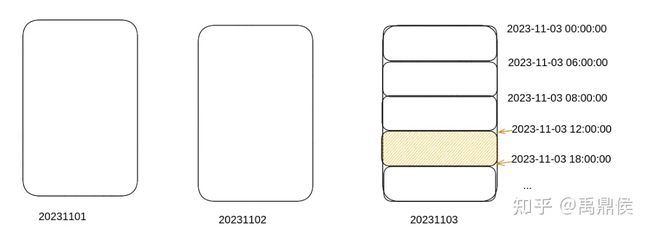
如下的例子,现在有三个partition,分别为20231101,20231102,和20231103, 我现在需要查2023-11-03 12:00:00 到 2023-11-03 13:00:00这一个小时的数据,那么前面两个partition其实是可以看都不看,直接跳过的,然后在20231103的分区内做二分查找,就能很快定位到要查询的数据的分布。这样就不需要进行全表扫描了。
sorting key 和 primary key
很多人可能都不知道,MergeTree是有主键的。不过它所谓的主键并不是代表数据唯一,而是作为一个排序的手段。
primary key可以显式指定,也可以隐式指定。
隐式指定就是不声明primary key的字段,那么clickhouse会默认拿order by的字段作为primary key。
但是!
primary key和sorting key还是有区别的。
从概念上来说,primary key是作为索引的,sorting key是用来排序的。
primary key一定是sorting key,但sorting key不一定是primary key。
在排序的时候,primary key一定要放在靠前的位置。

那么,这二者在使用上有什么区别呢?
正常情况下我们是不需要考虑这二者的区别的。但是对于聚合引擎,比如SummingMergeTree和AggregateingMergetree, 分开设置primary key和order by将会有助于优化。为了比较具象的说清楚这二者的关系,下面举个例子:
查询条件: WHERE A
聚合条件: GROUP BY (A, B, C)
此时,这样指定主键和排序字段会比较高效:
PRIMARY KEY(A)
ORDER BY (A, B, C)
排序键是为了上下文一致性,和最大化的压缩比例。而且group by的维度字段在物理上靠的更近的话,查询起来也更高效,这是肯定的。
主键是需要占磁盘空间的。而且基于主键的索引在查询时会被加载到内存当中,如果主键过多,那么内存效率相对来说会非常低下。因此,我们只需要把过滤的列放到主键索引里就可以了,它主要用来快速筛选,缩小数据范围。
还有一点比较重要。现在我们order by (A, B, C )三个维度,假设现在需要新插入一个维度D,那么这个时候,我们想要修改表,变成 order by (A, B, C, D)是非常轻量级的。因为A,B,C本身就是排好序的,所以D一开始肯定是没有数据的,那么更新的成本其实是0。如果我们把主键索引和排序键设置成一样的会怎么样?我们需要修改主键索引的文件,相当于重新构建整个索引文件了,这个成本之大,其实是不可想象的。
所以将这二者分开的最大意义,是为了给修改order by腾出一定的空间。
思考: ReplacingMergeTree去重,根据的是order by,还是primary key?
注意: ReplacingMergeTree去重是根据order by,而不是primary key。

稀疏索引
我们前面提到的primary key, 和我们通常关系型数据库中见到的主键索引有所不同,它是属于稀疏索引。稀疏索引是ClickHouse中一个非常重要的概念。它有别于MySQL这些OLTP数据库的行级索引。行级索引就是一行数据一条索引,每个索引都可以精确定位到一条数据。所以行级索引的跳数通常等于该索引字段去重后的个数。
但是稀疏索引不同,它的跳数由索引粒度决定,即多条数据才会去创建一个索引。MergeTree引擎在建表的时候,默认的索引粒度是8192,也就是说8192条数据才会创建一个索引(当然不是绝对的,它这个粒度大小是自适应的,可以动态调整大小)。
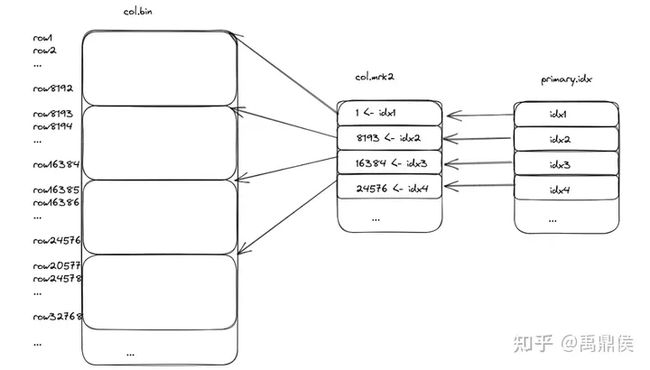
上图描述了根据主键稀疏索引去查找数据的过程,在每个part目录下,会有一个primary.idx文件,存储的是索引信息,根据稀疏索引,可以在col.mrk2文件中找到实际数据在bin文件中的偏移量,然后根据偏移量就可以定位到数据处于哪个颗粒中。当然这个地方画得比较简略,实际逻辑比这个要复杂。
颗粒,是clickhouse查询的最小单位。
稀疏索引的前提是数据必须是有序的。稀疏索引的存在,使得索引的存储成本极小,8192万行数据,只需要1万个索引,这对存储海量的数据是一个巨大的优化。又由于MergeTree引擎的特性,数据本身就是有序存储的,所以查询的效率自然而然就非常快了。
正常情况下,主键索引的查找逻辑是使用二分查找。但也不能一概而论,对于联合主键索引来说,需要看联合索引的顺序。
通过trace日志查看查询执行的逻辑,可以知道,第一关键字列使用的是二分查找算法,而非第一关键字列,使用的则是通用排除搜索算法。通用排除算法的性能要比二分查找低很多,因为它进行的是全表扫描。也就是说,非第一关键字列放在主键索引里,对该字段并不能起到优化作用。
所以,联合主键索引的创建顺序,是和查询场景息息相关的。
那么这种情况应该怎么解决呢?这里先留个悬念,大家也可以先思考一下。
建表优化
合理分区
通过测试发现,单表的分区数量最好不要超过1000个,否则会对写入性能有很大影响。
分区的选择可参考性有很多。假如数据存储的时间较长,比如存三年甚至更久,那么按天分区或者按星期分区或许比较合理。但是如果查询的场景大部分是根据天去查询,那么按天分区也许会比按星期会更好一些。
当然,还要考虑到数据规模因素,如果单日数据增量太大,比如APM的span数据,有些规模比较大的企业,可以达到秒增百万,此时如果选择按天分区的话,那么单表的单个分区可能就会达到数十TB。而实际上的查询场景可能比较频繁的还是查询15分钟,或者1个 小时的数据,那么,这时候就可以考虑按小时进行分区了。
合理选择shardingkey
单节点的clickhouse服务是没有shardingkey的概念的。我们谈论shardingkey的时候,其对象一定是clickhouse集群。
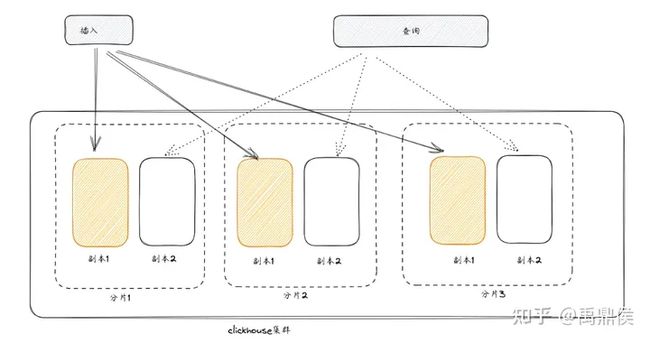
起初,设计shardingkey的意图,仅仅是为了负载均衡,尽量使得数据均匀地分布在把不同的shard内。通过这种方式,充分利用服务器的资源,从而使查询效率最大化。

上例中,分片1有10TB数据,分片2有100G数据,分片3则是800G数据,整体分布是不均匀的。
假设此时一个分布式查询语句过来,真正落到各个节点上执行的,查询的还是本地表,那么由于数据规模的不同,需要消耗的内存和CPU也是不同的。这在服务器资源充裕的情况下可能影响不大,可一旦系统资源本身就吃紧,那么MPP架构的短板效应就暴露无疑。性能最差的那个节点的性能,势必会拖累整个查询的性能。因此,我们需要通过shardingkey来尽可能地使数据均匀地落在不同的分片。
为什么需要shardingkey来做均衡,而不是通过round-robin的方式来写?
我们知道,clickhouse数据的插入是以batch为单位的,只要每个batch相对平均,那么round-robin之后最终得到的每个分片上的数据,始终是相对均衡的。
但是这种方式无法保证业务上的逻辑,它很可能会把有业务关联的数据分拆到了不同的shard里,这对于查询,往往是非常致命的。
接下来我们来考虑下面这一种场景:
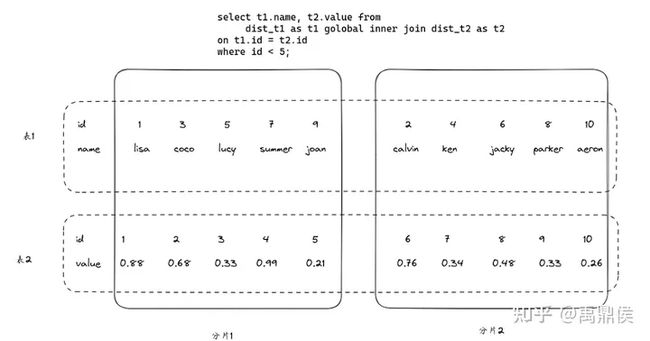
我们现在有两张表,并要对这两张表进行关联查询,虽然从数据量上来看,这两张表在shard1和shard2上面分布是均匀的,但是要做join查询,如果本地join,那么得不到我们想要的数据结果,所以只能用global join去查分布式表。这也就意味着,需要先将所有数据先查出来,然后在汇总节点上去做join,这对于查询来说,开销是巨大的。
而如果这时候,我们使用id作为shardingkey, 算法如下:
shardNum = id % clickhouse_shards + 1当计算出来的shardNum和分片编号相等时,将数据存入对应的分片,那么上述数据就可以重新排布如下:
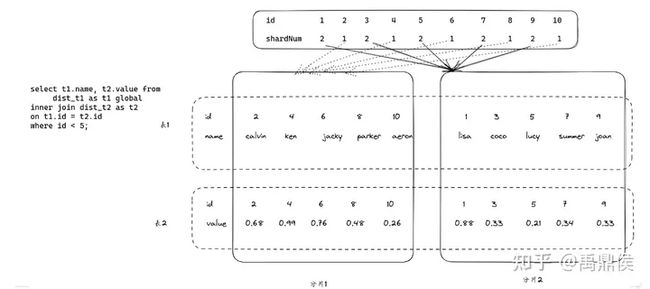
那么这时候去查询,实际上使用本地join得到结果,再汇总出去,性能提升将会是巨大的。
当然,这种选择shardingkey的方式,也是有些需要去考虑的点的:
- 如果集群内的某一个分片挂了怎么办?按照这种shardingkey的逻辑,这部分数据不可能写到其他的分片,那么会导致本来该写到该分片的数据永远block住,无法写入,除非集群被修复。
- 如果集群扩容或者缩容了,那么由于clickhouse_shards发生了变化,计算出来的shardNum和之前的算法算出来是不一致的,那么就需要一个rehash的过程,否则数据就会乱掉。
- 如果shardingkey选取不合理,也可能造成数据分布不均匀的情况。
- clickhouse_sinker提供了shardingkey的选择方案,如果指定的shardingkey本身就是一个数值类型,那么直接取余计算。如果指定的shardingkey是一个字符串类型,那么会先通过xxhash64得到一个值,再拿该值去取余计算。
- ckman提供了按照shardingkey做rebalance的功能,它可以在集群扩缩容之后对已有数据进行rehash,从而保证与后写入的数据保持hash算法一致。

合理选择 order by字段
order by的字段怎么选取,是由具体的查询SQL来决定的。
不同的查询场景,使用不同的order by字段,得到的效果可能差别非常大。
这就要求我们在建表之初,就要考虑好具体的查询场景,从而谨慎决定order by的字段(包括顺序)。
前面提到过,如果不显式指定主键字段,那么order by的字段就会被当成主键字段。
前面还提到过,对于联合主键,第一关键列会用到二分查找,而非第一关键列使用的则是全表扫描的通用排除搜索算法。这也就意味着,有些字段即使放在order by里,其实也是不适合作为过滤条件的。
那通用排除算法就毫无用处吗?
其实也不是的,它对于低基数的排序列,还是有很大的加速作用的。

上例中,cardinality_IsRobot就是一个低基数的列,它在800w数据中一共只有4个值。
这种如何理解呢?
在这里例子中,col1具有低基数。虚线框表示的是granule,那么相同的col1可能分布在不同的颗粒上。这时候,如果我们按照 col1 = 'v1' and col2 = 'w3'去做查询。
假设order by 顺序为:
ORDER BY (col1, col2);此时col1是第一关键列,那么按照col1做二分查找,反而一个颗粒都过滤不掉,到了col2, 需要做全表扫描。我们把整个过程分成两个阶段来看:
第一阶段: col1做二分查找, 4个granule,过滤完,还是4个granule
第二阶段: col2做通用排除搜索,至少得扫描到第三个granule的时候,才能停止(因为col2也是排过序的,所以看到有w4,说明后面肯定不会有w3了)
扫描的granule一共为 4 + 3 = 7个轮次。
如果我们改一下order by的顺序:
ORDER BY (col2, col1);我们仍然当成两个阶段来分析:
第一阶段,根据col2做二分查找, 4个granule立即缩减到2个(索引2和索引3)
第二阶段,根据col1做通用排除搜索,仍然需要扫描2个granule
扫描的granule一共为 2 + 2 = 4个轮次。
上面通过举例的方式讲解了order by的顺序对查询效率的影响。但实际使用时场景肯定要比这复杂得多,因为不太可能所有设计者一开始就能预料到所有的查询场景,随着业务的不断进化,SQL的查询场景也是越来越复杂,那么这个时候,为了提升性能,势必要修改order by的字段(或者顺序),这对于MergeTree来说,是一个非常重甚至是危险的操作,它可能导致数据在一定的时间内无法对外提供服务。
此时我们有几种解决方案:
- 额外建一张表,使用新的order by字段
- 这种方案的弊端在于需要冗余一倍以上的存储空间,而且表的数据需要双写,一旦有哪一个环节出问题,那么得到的结果就不是我们期望的。而且要修改表,需要同步修改两张表
- 对于用户不透明,在场景A需要查A表,在场景B需要查B表,对于使用者来说,十分不友好
- 创建物化视图,在物化视图里使用新的排序逻辑
- 同样需要占用一定的额外空间,但相比于重新建一张表,会好很多,表的schema修改也需要同步进行,好处是数据无需双写,只需要写一份数据就行了
- 对用户同样不透明,场景A需要查A表,场景B需要查物化视图
- 创建projection
- 最轻量级,所占的存储空间也是最少的,projection本身就是属于表的一部分,所以无需双写,也不用考虑同步修改表的问题
- 对用户透明,projection内部会自动选择最优的版本进行查询。
- projection的最大问题是,不那么容易被命中,如果WHERE条件中加入了projection中未声明的字段,那么projection并不会走到。
二级索引
所谓二级索引,是MergeTree在主键索引之外提供的另一类索引类型。它是作用在每个granule之上的,所以是先有主键索引,然后才能谈论二级索引的使用。
官方提供了很多中二级索引类型,通过这些索引,我们可以更快速地对整个颗粒做统计、过滤、去重等操作。
下图给出了常见的二级索引在SQL查询加速优化方面的范围列表。

二级索引虽然比较多,但其中使用比较广泛的场景是全文搜索。
首先给出结论,clickhouse的全文搜索能力,与ES相比,还是有很大差距的。
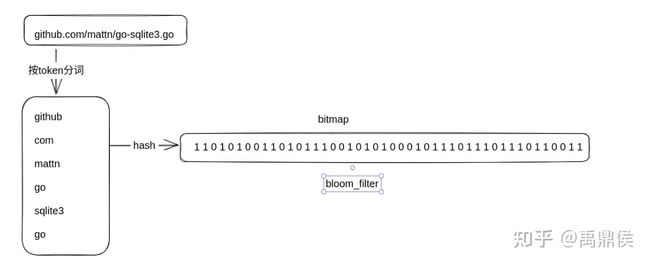
clickhouse使用二级索引做全文检索的核心思想就是:利用布隆过滤器,快速筛选掉大部分不符合条件的颗粒,然后在符合条件的少部分颗粒中进行查询。
布隆过滤器的原理就不多做解释了。它提供了一个长度,hash函数的个数,以及一个种子值。通过布隆过滤器可以判断一个字段值一定不存在,而不能判断一个值一定存在。
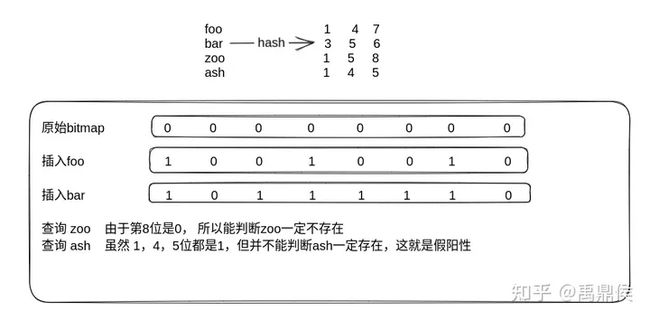
因此,对于IN, LIKE的查询有优化效果,但对于 NOT IN, NOT LIKE则无优化效果。
要想减小假阳性产生的概率,那么bitmap的长度要足够大,hash函数的个数决定了计算出来的hash值重复概率,hash函数越多,计算出来的hash值重复的可能性就越小,但是占用的bitmap空间也会越多,当bitmap长度一定,hash函数太多,那么极可能最终bitmap里全是1,那么对于过滤就毫无益处了。
bitmap足够大,hash函数足够多,理论上是可以保证足够小的假阳率的。但是二级索引也是需要占用存储空间的,而且hash函数越多,计算也就越复杂,耗费的CPU也会越多。因此,二级索引说白了,其实就是拿空间换时间。
我们说回全文检索。比较适合做全文搜索的二级索引有三个,分别是tokenbf_v1, ngrambf_v1, 以及inverted。我在ClickHouse利用跳数索引加速模糊查询一文中详细介绍了三者的区别。概括起来就是:
| tokenbf_v1 | ngrambf_v1 | inverted | |
|---|---|---|---|
| 分词方式 | 按非字母数字的特殊字符做分词 | 按长度做分词 | 按非字母数字的特殊字符做分词 |
| 索引原理 | 布隆过滤器 | 布隆过滤器 | 倒排索引 |
| 特殊字符过滤 | 不支持 | 支持 | 不支持 |
| 汉字过滤 | 不支持 | 支持 | 不支持 |
| 生产可用 | 是 | 是 | 实验性质,不推荐 |
| 占用存储空间 | 适中 | 和n长度有关,n越大,占用空间越少,n越小,占用空间越大 | 小 |
tokenbf_v1:
ngrambf_v1:

inverted:

个人比较推荐使用ngrambf_v1去创建二级索引。但是ngrambf_v1的长度n的选取非常讲究。
如果搜索的关键字的长度小于n,那么这个索引是不会被命中的。比如n = 10, 但是条件为where value like '%test%',那么这个索引边并不会生效。所以这就决定了n的值不是越大越好。测试表明,n的值也不是越小越好。因为当n足够小时,那么拆分出来的token就会越多,填充到bitmap的hash值也就会越多,那么假阳率也就越高,这时候反而什么都过滤不出来。
另有一点需要注意的是,二级索引能够提升查询效率的前提是,主键索引要创建得合理。
假设有如下场景:我们需要根据visitor_id = '1001'来做过滤。

布隆过滤器设置得再好,它也是针对颗粒而言的,在上例中,1001这个数,本身在所有的颗粒中都存在,所以即便是布隆过滤器的假阳率接近0,也是无法过滤掉任何一个颗粒的。但实际上呢,可能1001只是颗粒中8192行里的某一条或几条数据。那么这种场景,二级索引也是没有任何优化作用的。
利用物化视图和投影
前面我们已经提到过物化视图和投影在修改order by上的场景应用。
但物化视图和投影的更大用处是用于聚合查询的预聚合。projection相比物化视图来说更加轻量级,但从效果上来说,毕竟还是要比物化视图稍微差一点。这个很好理解,projection操作的毕竟还是原表,而物化视图把数据完全独立出来了,查询的时候是不需要在原表进行搜索的。
关于物化视图和projection的一些使用技巧。
举个交易串联的场景的例子来说明一下。交易串联场景,就是按照交易ID进行预聚合。我们这里使用物化视图来演示。
先创建本地表和分布式表:
CREATE TABLE IF NOT EXISTS tran_log ON CLUSTER abc (
ts DateTime64(3),
tranId String,
serviceCode String,
message String
) ENGINE=ReplicatedMergeTree
PARTITION BY toYYYYMMDD(ts)
ORDER BY (ts, tranId, serviceCode);
CREATE TABLE dist_tran_log ON CLUSTER abc AS tran_log ENGINE = Distributed(abc, default, tran_log, rand());这里提供两种创建物化视图的风格。
风格1:物化视图直接与本地表关联:
CREATE MATERIALIZED VIEW mv_tran ON CLUSTER abc
ENGINE = ReplicatedAggregatingMergeTree() ORDER BY (tranId)
POPULATE AS SELECT tranId, uniqExactState(ts) as logCount FROM tran_log GROUP BY tranId;
CREATE TABLE dist_mv_tran ON CLUSTER abc AS mv_tran ENGINE = Distributed(abc, default, mv_tran, rand());风格2:创建一张聚合表,物化视图作为聚合表和本地表的桥接:
CREATE TABLE agg_tran ON CLUSTER abc (
tranId String,
logCount uniqExactState(DateTime64(3))
) ENGINE=ReplicatedReplacingMergeTree()
ORDER BY transId;
CREATE TABLE dist_agg_tran ON CLUSTER abc AS agg_tran ENGINE = Distributed(abc, default, agg_tran, rand());
CREATE MATERIALIZED VIEW mv_tran ON CLUSTER abc
TO agg_tran AS
SELECT tranId, uniqExactState(ts) as logCount FROM tran_log GROUP BY tranId;
CREATE TABLE dist_mv_tran ON CLUSTER abc AS mv_tran ENGINE = Distributed(abc, default, mv_tran, rand());风格2相比于风格1,优势在于可以在运行期暂停和重启与原始表的连接关系。
华为云ClickHouse提供的Adaptive MV 提供了类似Projection的透明物化视图。
我们准备一些数据,在各个shard上执行(故意引入一些重复数据):
INSERT INTO tran_log VALUES
('2000-01-01 00:00:00.000', '001', 'open', 'open browser')
('2000-01-01 00:00:01.000', '001', 'buy', 'buy a ticket')
('2000-01-01 00:00:02.000', '001', 'close', 'close browser')
('2000-01-01 00:00:00.000', '002', 'open', 'open browser')
('2000-01-01 00:00:01.000', '002', 'buy', 'buy a ticket')
('2000-01-01 00:00:02.000', '002', 'close', 'close browser')
('2000-01-01 00:00:00.000', '003', 'open', 'open browser')
('2000-01-01 00:00:01.000', '003', 'buy', 'buy a ticket')
('2000-01-01 00:00:02.000', '003', 'close', 'close browser');我们使用分布式表聚合查询,和直接查询物化视图,得到的结果均一致:
SELECT tranId, uniqExact(ts) AS cnt FROM dist_tran_log GROUP BY tranId;
SELECT tranId, uniqExactMerge(logCount) AS cnt FROM dist_mv_tran GROUP BY tranId;
┌─tranId─┬─cnt─┐
│ 003 │ 3 │
│ 002 │ 3 │
│ 001 │ 3 │
└────────┴─────┘注意上述物化视图的使用,创建物化视图时,使用了uniqExactState, 而查询时,使用了uniqueExactMerge, 这种用法并不特殊,ClickHouse所有的聚合函数几乎都可以这样使用。
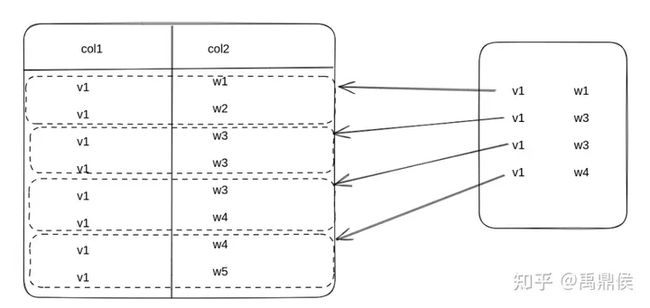
首先我们要知道,不管是物化视图,还是projection,都是针对单个part而言的。
这也就意味着,如果需要聚合折叠的数据位于不同的part,那么查询的结果很有可能是不准的。

如上图所示,由于uniqExact只能在part内去重,所以得到的最终结果,仍然包含有重复的数据,并不是我们所期望的结果。
而uniqExactState存储的并不是去重后的数据,而是一个去重后的状态,这个状态是不能明文读取的。只有当使用uniqExactMerge去查询时,它得到的才是一个part合并之后的数据。

查询SQL优化
常规查询优化
prewhere
prewhere就是先只读取执行prewhere表达式所需要的列,然后再补全读取select所需要的其他列。它的作用就是在查询之前,提前过滤掉一部分的数据。
现在prewhere已经不需要显式指定了。clickhouse优化器会默认将where条件移到prewhere中去执行,所以写where和prewhere效果是一样的。
谓词下推
所谓的谓词下推,就是尽可能地将过滤条件对数据源操作,使参与查询的数据越少越好。
用在SQL上,就是先过滤,后聚合。
举一个例子:
SELLECT count() FROM A JOIN B ON A.id = B.id WHERE A.a > 10 AND B.b < 100;上面这个查询,它会先join,然后从结果集里去执行WHERE条件的过滤。
这时候如果我们将WHERE条件放到子查询中,先过滤,再JOIN:
SELECT count() FROM
(SELECT * FROM A WHERE A.a > 10) AS A1
JOIN
(SELECT * FROM B WHERE B.b < 100) AS B1
ON A1.id = B1.id这样参与join的数据就会一下子少很多。
聚合外推
这个比较好理解,就是先聚合,再统一计算。
如 sum(money * 2), 那么需要计算N次,再进行N次sum; 而sum(money) * 2, 只需要N次sum后计算1次。
count优化
使用count()代替具体的count(col_name), 原因是count(col_name)需要实际去计算一遍,但是count()的话,底层文件是有一个count.txt文件的,直接读取文件数据即可。

大表join
clickhouse的join查询在OLAP场景似乎是不可避免的。尤其是clickhouse这种MPP去中心化架构,分布式join也越来越成为很多企业绕不过去的一个话题。那么如何才能高效的做到大表join?
首先,我们要知道clickhouse里表join的原理。
单节点join
clickhouse单机join默认采用的是hash join算法,也就是说,先将右表全量读取到内存,然后构建hashmap,然后从左表分批读取数据,到hashmap中去匹配,如果命中,那么就作为join之后的结果输出。

因为右表是要全量加载到内存的,这就要求要足够小。但是实际上右表大于TB级是很常见的事情,这时候就很容易出现OOM。
为了解决这个问题,有一种解决思路是将右表构建成大宽表,将维度拍平,使行尽量少,这样右表只需要加载少量的列进内存,从而缓解这一情况。
一个典型的落地实施案例就是clickhouse_sinker存储Prometheus指标的方案。它将指标分拆成两张表,一张metric表,用来存储时序指标值,一张metric_series表,用来存储具体的指标。两张表通过series_id进行关联。
在metric表中,每个时间点的每个值,都对应着一个series_id,我们通过这个series_id,反查metric_series表,就可以找到这个series_id对应的指标以及label。
分布式join
clickhouse的分布式join有两种玩法,一种是带global,一种是不带global。
普通join
- 汇总节点将左表替换为本地表
- 将左表的本地表分发到每个节点
- 在每个节点执行本地join
- 将结果汇总回汇总节点
这种做法有一个非常严重的问题。在第三步,每个节点执行分布式join的时候,如果右表也是分布式表,那么集群中的每个节点都要去执行分布式查询,那也就是说,如果集群有N个节点,右表查询就会在集群中执行N*N次,这就是读放大现象。
正是因为这种问题的存在,在比较新的clickhouse版本中,分布式join如果不加global,已经会从语法层面报错了。这说明官方已经禁止了这种写法的存在。
global join
- 汇总节点将右表改成子查询,先在汇总节点将右表的数据结果集查询出来
- 将右表的结果集广播给各个节点,与各个节点的左表本地表进行join查询
- 各个节点将查询结果发送给汇总节点
由于右表的结果已经在汇总节点计算出来了,那么也就不需要在其他节点重复计算,从而避免了读放大的问题。
但global join 的问题是它需要将整个子查询的结果集发送给各个节点,如果右表的结果集特别大,那么整个过程耗费的网络带宽也将是非常恐怖的。
正确姿势
- 大表在左,小表在右
- 数据预分布,实现colocate join。也就是将涉及到join的表按照相同的join key分片,使需要join的数据尽量都能在本地完成。也就是前文提到的shardingkey的用处。
- 改大宽表
并发查询
并发查询也是clickhouse的一个比较薄弱的领域。
因为对于clickhouse的查询来说,一个大的查询SQL往往会把整个服务器的资源吃满,如果并发查询比较多的话,那么不可避免地造成资源竞争,最终的结果就是谁也快不了,甚至还会出现OOM的情况。
官方默认的最大并发数是100, 这个100是每个节点的最大并发数,而不是整个集群的。它包含了查询的并发和写入的并发。
我们很容易碰到这样的场景:在界面上点击一个查询耗时比较久,等得不耐烦,就多点了几下。事实上,clickhouse并不会因为你在界面上多点了一下鼠标,就取消之前的SQL运行,反而会产生多个SQL在并发执行,如果这种耗时比较久的SQL越积CPU打满,造成的结果就是恶性循环,其他SQL也会越来越慢,最终导致并发的SQL超过了设置的最大并发数,再也无法执行任何查询语句,甚至写入都会受到影响。
我们一般建议将最大查询并发数,设置为最大并发数的90%,预留出10%的并发数量供数据写入使用。这样即使查询并发数打满了,仍然不会影响到数据的写入。
我们可以通过配置来实现这一策略:
100
90
读写分离
读写分离,其实也是资源最大化利用的一个实现方案。
写的节点和读的节点互不干扰,彼此都能完整利用服务器的资源。比如插入的时候插入1,3,5节点,查询的时候查询2,4,6节点。
硬件优化
磁盘选择
推荐做RAID5磁盘阵列。
为什么推荐raid5, 首先是快,其次是有容错能力。raid0虽然快,但无容错能力,一块盘坏,数据全无。raid1虽然有冗余能力了,但是性能下降了。而raid5兼顾了二者的优点。
当然有条件的推荐直接上SSD,那就是快上加快。现在国产存储逐渐展露头角,固态硬盘也不贵,一块1TB的固态硬盘,成本也就三四百块钱。
有人说,我有多块磁盘,不做raid行不行?从技术实现上来说,肯定是可行的。但带来的就是性能的牺牲,做成了raid,可以统一索引,而配置多块盘到default卷,如果要查询的数据跨盘了,那么需要在不同的磁盘上都构建一遍索引。这个性能差异在数据量不大的情况下,可能肉眼感受不出来,如果数据量达到了一定的量级,差异还是有的。而且,冗余能力肯定是没有的,如果其中一块盘坏了,那么数据能不能恢复,就要看人品了。
我个人比较推荐固态硬盘和机械盘搭配使用。固态磁盘做default磁盘,机械磁盘可以做raid5。热数据,经常会被查询的数据(比如近两三天的数据),存储到固态磁盘,这样不论是写入,还是查询都非常快,超过一定时间的数据,可以通过存储策略转移到机械磁盘上,因为查询频率并不怎么高,那么受到的影响就会有限。
磁盘的io决定了数据的读写速度。在大数据量场景,机械磁盘和固态磁盘的查询和写入性能差异还是非常大的。测试环境、POC环境,如果条件有限,可以用机械磁盘,生产环境,特别是对响应要求比较高的生产系统,一定要上固态,最好是一步到位直接使用NVMe。
生命周期管理
前面提到磁盘,那么就不得不提到存储策略。而存储策略和表的生命周期往往是相伴相生的。
生命周期对表的优化体现在两个方面。
第一个是实现数据的冷热分离。就如前面提到的,把时间比较近的,查询比较频繁的数据存在固态磁盘,这样使查询和写入都有一个最佳性能。但固态硬盘的成本毕竟较贵,不可能无限扩容,因此,可以将一些比较查询不那么频繁的温数据存放在机械磁盘中。而那些一个月以上的数据,可能一年也查询不了几次,主要用来做归档用的,就可以存储在HDFS或者S3这类对象存储中,其特点是不利于查询,但是存储空间够大,成本便宜。

但是有些使用场景可能并不需要存储那么长时间的数据,也没有归档的硬性要求,这时,就可以利用生命周期来做删除策略,将某短时间时间之前的数据直接删除掉,这样保持表里永远只存储一定时间段的数据,那么数据规模也将维持在一个固定的范围,不会无休止增长,查询性能相对来说也会比较稳定,不会有太大的波动。
需要注意的是,生命周期的前提是数据的插入是有序的。比如实时的时序数据。
如果插入的数据无序,又设置了生命周期,那么可能出现的一种情况就是数据刚刚插入,生命周期就生效,立即就给删除了,除了徒然增加资源消耗,这部分数据永远无法查询到。
而且这种情况一旦出现,其时间跨度一定很大,必然落在不同的partition里,那么数据的频繁写入、删除,必然给zookeeper带来非常大的压力,很容易造成表出现READ_ONLY的情况。
集群规模
ClickHouse是MPP架构。MPP全称叫海量并行处理架构。这种架构的集群,每个节点的地位是相等的,也就是说,每个分片内,各个副本都是主,既可以读,也可以写。它最大的特点就是share nothing,也就是每个节点只访问本地的资源。
也就是说,一个查询语句落到集群里,它是先在各个节点进行查询、聚合、汇总,最后汇聚到汇总节点统一返回。
这就很容易得出结论,当CPU或者内存成为瓶颈时,扩容集群的分片数,是可以有效加速查询效率的。
我曾经给很多客户做过集群资源评估,推荐过集群硬件配置。需要考虑很多因素,比如数据日增量,存储时间,查询场景(如查询多长时间的数据)等。数据日增量决定了建表的分区策略,存储时间和日增量就能计算出数据总规模(当然要考虑压缩),这决定了硬盘容量需要多大。正常情况下需要冗余1.5倍左右的磁盘空间, 因为数据被merge之后,原始part的数据并不是立即被删除的,所以大多时候经常是两份数据共存,那么如果实际数据是1TB(压缩后),那么实际占用的磁盘肯定是不止1TB的。
查询场景决定了CPU和内存资源的占用,如果查询的数据量大,那么对应需要占用的CPU和内存自然就要更多。此时,要么优化查询语句以及建表语句,要么就只能使用更多的资源。
读写性能瓶颈
此处讨论的瓶颈,是指表和SQL都已经做到了最大化的优化,硬件以及第三方原因带来的性能瓶颈。
写性能瓶颈
zookeeper
写数据的瓶颈,绝大部分都是zookeeper引起的。特别是insert分布式表的时候,它的数据会先全部insert到某一个节点上的一个临时目录,然后通过zookeeper按照sharding policy进行分发到各个分片节点,同时副本节点需要从主节点上去拉取数据,走的都是zookeeper。
因此,我们不推荐写分布式表,一来是给单节点带来非常大的负担,二来给zookeeper带来很大的压力。第三就是无法保证数据在物理上和业务逻辑上的均衡。
zookeeper的瓶颈主要在于znode的数量,如果znode的数量过多,会非常影响性能。经测试,当znode数量达到M级别(百万)时,插入性能就已经非常缓慢了,严重的甚至可能造成zookeeper失联,从而使表进入read_only状态。
znode数量与什么东西有关呢?
首先是part的数量。每个part在zookeeper上都有副本数 * part数个znode。通俗点计算,N个节点,M个part,那么znode的数量就会无限接近于M* N。因此,如果插入的batch太小,数据来不及merge,那么就会产生非常多的part。
还有一种可能就是replica_queue过多。这种情况一般是merge任务已经分发到了各副本节点,但是副本节点来不及合并,那么这个任务都阻塞在队列里,队列越来越长,就会导致znode越来越多。
之前笔者就曾碰见过,zookeeper上log_pointer数据意外丢失,造成数据一直没有同步,但是数据又一直在写,导致replica_queue越积越多,znode达到了150w之巨,最终导致了zookeeper的不可用。
磁盘IO
磁盘IO很好理解,固态硬盘的写入速度肯定是远远大于机械硬盘的。如果发现CPU一直没吃满的情况下,写入速度怎么都上不去,那么很有可能就是磁盘IO限制了写入的性能了。这时,就需要考虑更换性能更高的固态硬盘了。
网络带宽
网络带宽的瓶颈一般出现在副本同步数据上。因为数据插入,肯定是插入到分片的某一个副本上的,那么其他副本要同步数据,必然要通过网络传输的方式来同步,那么当写入速度足够快,网络带宽必然会成为数据同步的瓶颈。一般生产环境,推荐使用万兆网卡。
读性能瓶颈
磁盘IO
查询,说白了就是扫描磁盘 。因此读磁盘的快慢就决定了查询的快慢,这点是显而易见的。
网络带宽
分布式查询,需要将数据结果从各个节点汇总到初始节点,这个过程是需要占用非常大的带宽的。如果涉及到分布式join,那么带宽将会占用更多。
内存和CPU
MPP架构决定的,在本地查询,充分利用本地资源。当我们一个查询SQL运行比较慢,通过增加节点能有明显改善的时候,那说明瓶颈就在CPU上。如果内存不足,直接就OOM了,就不会有执行完成的机会。
优化推荐
硬件层面
- 优先使用固态硬盘
- 使用raid5磁盘阵列
- zookeeper单独部署,不要与其他业务混用
- 为保证单节点资源利用最大化,不建议集群混合部署,一个节点仅部署一个服务
使用层面
- 建表时合理分区
- 合理指定主键字段,排序字段
- 合理创建二级索引(全文检索场景)
- 合理使用物化视图和projection(预聚合场景)
- 选择好shardingkey(方便Colocate join)
- 尽量使用子查询代替join
- 配置读写分离
- 配置生命周期,冷热数据分离或清理策略
本专栏知识点是通过<零声教育>的系统学习,进行梳理总结写下文章,对C/C++课程感兴趣的读者,可以点击链接,查看详细的服务:C/C++Linux服务器开发/高级架构师