g2o--ba代码解析
概要
g2o是常用的图优化理论c++库,其自带了很多example讲解如何使用该库文件,本文分析其中ba的示例代码。
所谓的图优化,就是把一个常规的优化问题,以图(Graph)的形式来表述。
在图中,以顶点表示优化变量,以边表示观测方程。于是总体优化问题变为n条边加和的形式(边是约束)。在具体编写g2o代码时,我们也需要明确哪些是顶点(优化项),哪些是边(约束项)。
业务场景
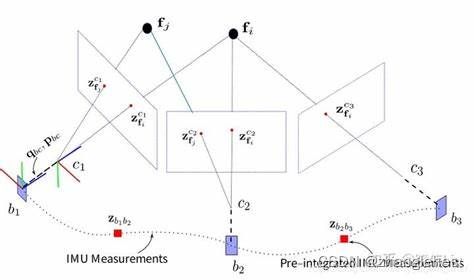
如上图所示,存在以下变量
f -- 路标,或者观察点,或者物体的特征点,在ba中作为顶点出现;
b -- 观测者的位置和姿态,在ba中也是作为顶点出现;
z -- f在相机所在的b的投影,在ba中也是作为边出现;
代码解析
设定求解器
g2o::SparseOptimizer optimizer;
optimizer.setVerbose(false);
string solverName = "lm_fix6_3";
if (DENSE) {
solverName = "lm_dense6_3";
} else {
#ifdef G2O_HAVE_CHOLMOD
solverName = "lm_fix6_3_cholmod";
#else
solverName = "lm_fix6_3";
#endif
}
g2o::OptimizationAlgorithmProperty solverProperty;
optimizer.setAlgorithm(
g2o::OptimizationAlgorithmFactory::instance()->construct(solverName,
solverProperty));初始化路标位置
vector true_points;
for (size_t i = 0; i < 500; ++i) { // 随机生成500个路标
true_points.push_back(
Vector3d((g2o::Sampler::uniformRand(0., 1.) - 0.5) * 3,
g2o::Sampler::uniformRand(0., 1.) - 0.5,
g2o::Sampler::uniformRand(0., 1.) + 3));
} 设置相机的相关参数
double focal_length = 1000.;
Vector2d principal_point(320., 240.);
vector > true_poses;
g2o::CameraParameters* cam_params =
new g2o::CameraParameters(focal_length, principal_point, 0.);
cam_params->setId(0);
if (!optimizer.addParameter(cam_params)) {
assert(false);
} 初始化观测者的位置
int vertex_id = 0;
for (size_t i = 0; i < 15; ++i) { // 15个观测者位置
Vector3d trans(i * 0.04 - 1., 0, 0); // 平移的距离
Eigen::Quaterniond q;
q.setIdentity(); // 无旋转
g2o::SE3Quat pose(q, trans);
g2o::VertexSE3Expmap* v_se3 = new g2o::VertexSE3Expmap();
v_se3->setId(vertex_id);
if (i < 2) {
v_se3->setFixed(true); // 设置不动点,在g2o的实现中,至少存在一个不动点
}
v_se3->setEstimate(pose); // 设置初始化位姿,引擎在迭代过程中会更新它
optimizer.addVertex(v_se3); // 添加至顶点,作为优化项
true_poses.push_back(pose);
vertex_id++;
} 添加观测者所见路标在相机中的投影点
for (size_t i = 0; i < true_points.size(); ++i) { // 遍历所有路标
g2o::VertexPointXYZ* v_p = new g2o::VertexPointXYZ();
v_p->setId(point_id);
v_p->setMarginalized(true);
v_p->setEstimate(true_points.at(i) +
Vector3d(g2o::Sampler::gaussRand(0., 1),
g2o::Sampler::gaussRand(0., 1),
g2o::Sampler::gaussRand(0., 1))); // 对初始化点进行扰动
int num_obs = 0;
for (size_t j = 0; j < true_poses.size(); ++j) { // 遍历观测者位姿
Vector2d z = cam_params->cam_map(true_poses.at(j).map(true_points.at(i)));
if (z[0] >= 0 && z[1] >= 0 && z[0] < 640 && z[1] < 480) {
++num_obs; // 在相机中能观察到该路标
}
}
if (num_obs >= 2) { // 如果只有一个位置能观察到该路标,无法建立回环检测
optimizer.addVertex(v_p); // 将该路标添加到顶点中
bool inlier = true;
for (size_t j = 0; j < true_poses.size(); ++j) { // 遍历观测者位姿
Vector2d z =
cam_params->cam_map(true_poses.at(j).map(true_points.at(i))); // 计算在相机中的投影点位置,是一个二维量
if (z[0] >= 0 && z[1] >= 0 && z[0] < 640 && z[1] < 480) {
z += Vector2d(g2o::Sampler::gaussRand(0., PIXEL_NOISE),
g2o::Sampler::gaussRand(0., PIXEL_NOISE)); // 添加误差
g2o::EdgeProjectXYZ2UV* e = new g2o::EdgeProjectXYZ2UV();
e->setVertex(0, dynamic_cast(v_p)); // 第一个点为当前路标
e->setVertex(1, dynamic_cast(
optimizer.vertices().find(j)->second)); // 第二个点为当前的位姿
e->setMeasurement(z); // 设置边的值
e->information() = Matrix2d::Identity();
if (ROBUST_KERNEL) {
g2o::RobustKernelHuber* rk = new g2o::RobustKernelHuber; // 设定核函数
e->setRobustKernel(rk);
}
e->setParameterId(0, 0);
optimizer.addEdge(e); // 添加边
}
} 小结
在实现中,观测者的位姿和路标的位置均是存在初始值的,可以这么理解:观测者的位姿是通过gps定位的方式获得(如果是通过惯导推算的方式,位姿间也可以建立边),而路标是静止的,可以进行一次测量。
在实际优化中,观测者的位姿和路标的位置均会被调整,以很好的满足测量值。
补充知识
相机成相的示意图
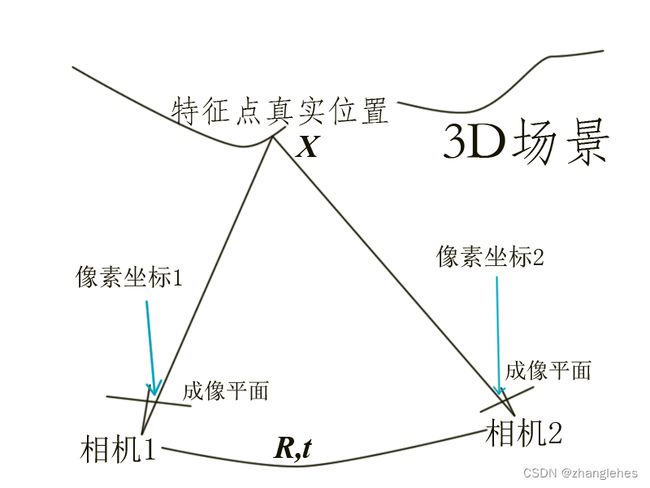
相关公式

lambda -- 相机内参,深度值
C -- 相机内参矩阵
X -- 特征点的三维空间位置
z -- 在成相平面的二维位置
R -- 相机2相对于相机1的旋转矩阵
t -- 相机2相对于相机1的平移向量